【论文翻译 - RFID】射频全息图:利用商业化产品对移动射频标签进行实时高精度追踪
直接引用 http://m.360docs.net/doc/info-c19c44d13968011ca2009195.html
Tagoram: Real-Time Tracking of Mobile RFID Tags to High Precision Using COTS Devices
摘要
在许多的应用领域中,我们需要识别某个物体并且进行高精度定位(定位精度达米甚至厘米水平)。虽然以前建立的定位系统已经可以满足如此高的定位精度要求,但是这些系统有的成本太高,有的会因为各种各样的影响因素在使用一段时间后出现性能退化(定位精度下降)的情况,例如基于计算机视觉的方法。
在本文中,我们提出了一种基于RFID的系统,Tagoram,利用商业的RFID 标签与读写器对物体进行定位与追踪。对移动的RFID标签进行实时追踪是一个十分艰巨的任务,更难的地方在于要达到很高的定位精度要求。我们的系统实现了如下三个目标:利用背向散射信号的相位值,利用商业的RFID读写器读取信息,估计物体的位置。在Tagoram系统中,我们利用标签的移动性建立了一个虚拟的天线矩阵,通过使用几个物理天线在一个时间窗口上获得的读数。为了说明我们的系统的基本思想,我们首先关注一个简单的情况,即标签沿着一个系统已知的固定轨迹进行移动。我们提出了使用差分增强全息图(DAH)算法进行定位追踪,此算法有助于提高即时追踪移动的RFID标签的精度。然后我们设计了一个全面的解决方案来准确复原标签的移动轨迹和它的位置,同时情况也不局限于已知标签轨迹,即可以将这个解决方案用于标签轨迹未知的情况。
我们利用商业的标签和读写器已经实现Tagoram系统。这套系统已经在实验室环境下进行过广泛测试,并且在实际的航空公司中使用了一年多。在实验室环境下,我们已经能够做到将移动标签的实时追踪精度提高至毫米级,在直线轨迹下的平均误差为5mm,环形轨迹下为7.29mm。我们在分别在两个机场部署了大型行李分类系统,并进行了整整一年的追踪,结果表明Tagoram系统在实际使用中能到达厘米级别的精度,平均误差为6.35cm。
关键字
RFID;追踪;定位;DAH;Tagoram
1.简介
无线射频识别技术(RFID)是一个快速发展的技术,其原理是利用射频信号自动识别特定物体。此技术最有前途的应用方向之一是用于精确追踪移动的物体。提高追踪的精度无疑会有助于实现许多应用。例如,超市可以通过监视商品的运动轨迹来深入挖掘消费者的购物习惯。同样的,此项技术也会有助于对复杂的多人行为进行自动识别,例如通过对足球进行标记,发展进去边线裁判技术。利用射频标签,还可以开发出许多新型的无源人机交互设备,例如,将标签附着在手指上,在空气中写字作画,你所画的图形显示在电脑屏幕上。对某些新兴的RFID应用来说,准确追踪信息也是必不可少的,例如顾客自动结账系统。如今的机器人已经能够在装配任务方面替代人类。目前机器人学术界和工业界对这方面的技术都很感兴趣,他们希望有一天机器人能在装配线上实现如下功能:搜寻特定物体,将它捡起来,集货,配送。机器人要完成这样的任务需要将追踪物体的精度提升至厘米水平甚至毫米水平。另一个典型的RFID应用是进行物体分拣。在机场,也许轻微的追踪误差就会导致出现错误的行李分拣。根据海南航空公司的报告显示,超过90%的行李丢失原因是由于机场传送带上发生了追踪和分拣错误。在本文中,我们致力于解决如何实现高精度追踪移动RFID标签的问题(精度水平达厘米级甚至毫米级),以满足实现上述这些挑战性应用的需求。
现有的RFID定位技术不能直接应用,有如下几个原因:首先,据我们所知,能达到高定位精度的方法目前基本上鲜有报道,特别是在移动标签定位方面。其次,许多RFID定位方法(例如[2-10])需要依靠预先部署的参考标签进行精确校准,这对于跨度很长的追踪系统来说是不可行的(例如机场的分拣线)。第三,移动的标签处于快速变化的环境与非理想状态下的通信条件中,例如射频信号的多路径反射,不同取向的标签,等等,现有的大多数定位技术在这一类环境下都不能使用,因为他们都是基于静态通信环境假设下的技术。
在本文中,我们设计了Tagoram系统,它利用接收信号的相位值对移动标签进行了实时高精度追踪。我们注意到商用RFID产品对接收到的射频信号的相位值可进行高分辨率的检测识别,精度可达0.0015弧度。这样一个精度水平完全可以用来对物体毫米级别的位移进行定位。根据上述的基本原理我们可以开发出一个实际的定位系统,然而,存在着一些巨大的挑战。首先,在接收端射频信号的相位值测量会受到热噪声影响,其结果导致实际测量的相位值是一个高斯分布下的随机变量。如何从不确定的相位值测量结果中得到一个准确的追踪结果,这是一个需要解决的问题。其次,设备的差异会在相位值测量中引入额外的相位偏移,我们称之为―多样性‖。不同的射频标签或读写器有不同的多样性。因此之前所有标签和读写器的校准都是不切实际的,同时在计算上也是不可行的,我们需要特别小心地回避这方面的问题。第三,环境的快速改变使得相位测量得到的是一个复杂的结果,这个结果混合了射频信号传输过程中的视距通信与非视距通信两种情况。由于很难将这两种情况分开,因此如果能够精确导出标签位置意义将十分重大。为此,我们提出了一种基于全息图的方法,称之为Tagoram,通过使用商业的RFID标签和读写器以及一些物理天线来解决上述问题。通过观察不同扫描时间下不同读写器天线获得的数据,我们建立了一个RF相位全息图。为了解决标签移动的问题,我们假设天线相对于移动的标签作相反方向的运动。正是因为读写器假想的―移动性‖,读写器相对于标签在不同位置会观测到不同的RF 相位值,这些相位值组成了一个RF全息图,就好像这些相位值是从一个虚拟的天线阵列中获得的(此时标签是―固定不动的‖)。如果事先已知标签的移动方向和运动轨迹,那么相对于标签的天线阵列的位置通过计算是可以确定出来的。因此我们可以根据标签初始位置的即时全息图,精确追踪标签的移动情况。为了解决之前发现的那些问题,我们在简单全息图的基础上进一步的开发出了差分增强全息图算法(DAH)。具体的细节将在第4第5部分进行阐述,我们放宽了假定条件,即我们已知标签的移动轨迹,根据这一假定设计出一种技术方法,利用天线观测到的相位值准确复原标签的移动轨迹。利用从天线阵列估计得到的连续标签移动速度,确定出一系列候选的标签移动轨迹。然后利用DAH算法识别出,生成RF相位观测值可能性最高的那条轨迹。为了能够实时定位和追踪标签的运动轨迹,我们提出了几项技术来加速计算全息图。
结果总结:我们通过利用配备有4个天线的商业读写器实现了Tagoram(参见第6部分)。我们首先在所有通信不规则的室内环境下进行了广泛的实验测试,并与RSS、OTrak、PinIt和BackPos技术进行了比较(第7部分)。我们在不同的轨道上对附着标签的物体进行了测试。根据我们的实验结果,在已知运动轨道和不需要参考标签的情况下,运用了DAH算法的Tagoram系统可以达到毫米级别的精度水平,其中在直线轨迹下误差中值为5mm,环形轨迹下误差为7.29毫米,相比于上述技术精度分别提高了82、21、16和55倍。甚至在不可控的情况下,配备了4个天线的Tagoram系统也能达到厘米级别的精度水准,平均误差为12.3cm。此外,Tagoram系统采用了增量计算的策略来生成最终的全息图。我们的实验显示,只需要2.5s的时间就可以通过Tagoram获得高精度追踪。对于大多数实时应用来说,特别是对于机械控制系统,例如分拣和装配系统,这是一个可以接受的水平。
我们然后在真实的机场进行李分拣系统中进行了大规模的实验研究,即将RFID标签附着在行李上,追踪行李的运动情况(第8部分)。我们开发了一个定制的配备有多天线的RFID读写器,称之为TrackPoint。我们将10台TrackPoints 设备部署在中国最繁忙的两个机场,首都北京国际机场(BCIA T1)和三亚凤凰国际机场(SPIA),用于自动行李分拣系统。自2013年1月开始我们进行了长期的初步研究。此项实验研究到目前为止已经消耗了11万枚RFID标签。研究期间我们一共收集了多达120亿条的追踪记录。在实际应用环境中,我们对数以百万计的行李进行了分拣输送,由于现场存在各种各样的金属运输车辆,RF信号在传递过程中经历了很多次的多路径反射。实际追踪结果表明,Tagoram系统可以达到厘米级别的精度,平均误差为6.35cm。
贡献:总而言之,我们作出了如下贡献:据我们所知,Tagoram是首个能成功限制多路径反射现象造成的负面影响的系统,同时也能降低热噪声和标签多样性造成的相位测量误差。其次,我们的Tagoram系统完全基于商业的RFID设备,这使得Tagoram系统的快速应用和部署成为可能。第三,我们分别在室内和机场的分拣环境下对Tagoram进行了系统地评估。结果表明,Tagoram能对移动射频标签进行实时高精度追踪。
这篇文章剩余部分的组织架构如下:我们在第2部分介绍了研究背景以及初步研究的情况。第3部分综述了Tagoram系统的主要设计过程。第4部分简要介绍了在可控轨迹下(即已知标签运动轨迹)Tagoram系统如何利用DAH算法实现定位追踪,第5部分为不可控轨迹下Tagoram系统的实现细节。第6部分描述了Tagoram系统的实现过程,并在第7和第8部分对该系统进行评估。在第9部分我们对我们所做的工作进行了一个总结回顾,并在第10部分给出了结论。
2.背景
无源RFID系统利用背向散射无限电信号进行通信。标签为无源标签,纯粹从读写器发出的电磁波信号中获得能量。图1演示了读写器与无源标签之间进行背向散射通信的概念图。从读写器天线发出的无线信号被无源标签接收,标签的天线上产生感应电压,发送信号(即将辐射波反射回读写器天线),使得读写器天线上也产生了一个感应电压,从而产生了一个能被检测到的信号,即背向散射信号。标签通过改变天线阻抗,使用开关键控(开路—短路)来调整它所发射的背向散射信号中的数据(0和1)。一般的商用读写器连接有4个定向天线。每个天线都在自己的特定时间段内传输信号,以免读写器内发生数据冲突。标签的方向被定义为读写器天线的偏振方向与标签天线之间的角度。
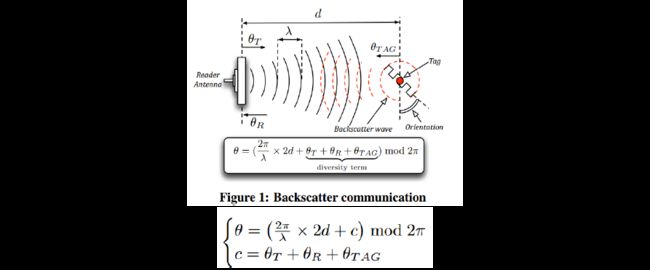
RF相位值:RF相位值是一类通用的物理参数,一般可用商业读写器检测得到。假设d是读写器天线和标签之间的距离,那么在背向散射通信中,信号经来回传输,传输总距离为2d。RF相位值在传输过程中发生相位旋转(相位值θ随传输距离2d不同而改变),除此之外,读写器的发射、标签的反射特性以及读写器的接收电路会引入额外的相位旋转值,分别将它们表示为θT、θTAG、θR。读写器输出的总相位旋转θ[11]可以表示为:
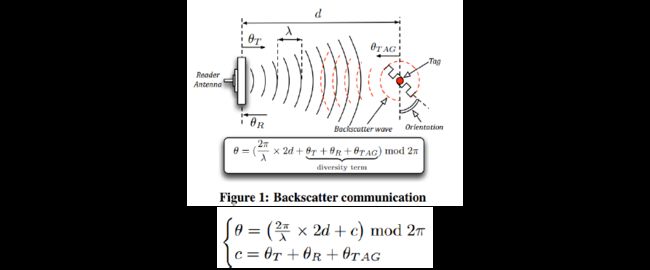
其中λ表示波长,c称之为多样性项,与硬件特性相关。相位值是一个以2π弧度为周期的函数,在背向散射通信中,每λ/2距离会重复相同的相位值。许多现代的商用RFID读写器,例如ImpinJ R420[12],能够检测得到发送信号与接收信号之间的相位差。在特定的天线和通信频道下,读写器每次对一个标签进行询问,并输出一个与之对应的RF相位估计值。典型的超高频读写器拥有16个频道,在920 ~926MHZ的ISM波段下工作。因此,读写器接收信号的理论分辨率可达0.0015弧度,从而能提供大约为3200.0015/(43.14)=0.038mm的距离分辨率(320mm是读写器16个频道的平均波长)。这种超高分辨率使得利用RF 相位实现mm级别的定位追踪成为可能。
面临的挑战及实证研究:
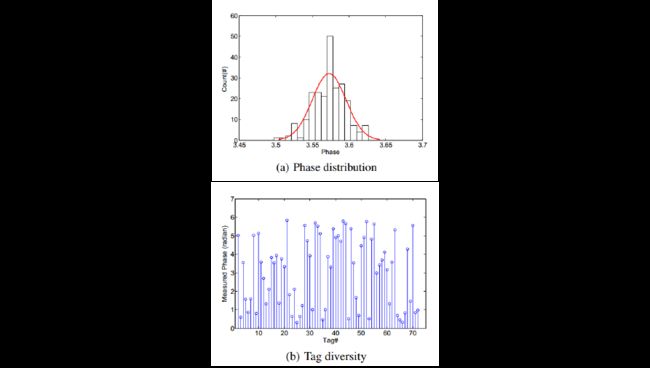
(i)相位估计值是基于读写器接收到的信号,然在读写器接收模块上的热噪声总是存在无法消除,这会到时测量存在误差。我们在不同实验条件下对100多个标签进行过实证研究,即环境温度从0℃到40℃,包含了16个频道的不同频率(920~926MHZ),接收信号强度RSS从-70到-30dnm(不同方向)。图2(a)描述了在第5频道下测得的一组结果。这些实验结果表明,相位测量结果存在随机误差,测量结果遵循标准差为0.1弧度的高斯分布。在以下部分中,我们将认为相位测量值是一个高斯随机变量,而不是一个准确值。
Tagoram DAH 射频全息图 利用商业化产品对移动射频标签进行实时高精度追踪
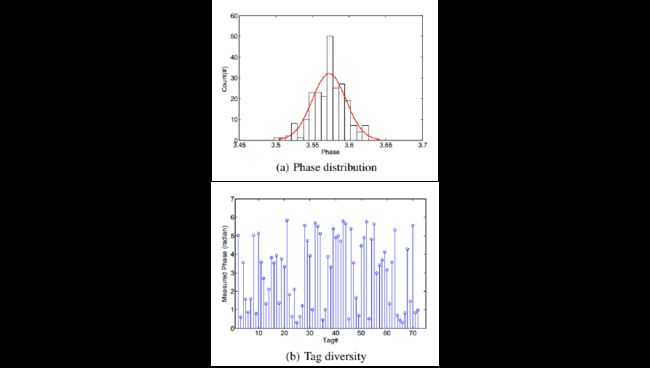
(ii)为了证实在RF相位测量上存在标签多样性,我们一次将70枚标签放置在了相同的位置。每一枚标签测100次相位值,并计算平均值,结果如图2(b)所示。我们观察到相位测量值分布在0.3007~5.8438弧度之间。这样的观察表明,标签多样性对于相位测量的影响,在实际中是不容忽视的。我们同时进行了柯尔莫哥罗夫-斯米尔诺夫检验(KS—test),研究标签的多样性是否可预知。通过对上述相位测量值进行KS—test测试,我们发现均匀分布超过了0.5显著水平,因此标签多样性很难经公式推断得出。
总之,热噪声和标签多样性是我们在相位测量过程中不得不解决的两个问题,因为它们会进一步影响到定位追踪精度,而还没有学者对这两方面的问题进行过深入研究。
3.TAGORAM 概述
Tagoram是一种基于RFID技术的面向移动物体的实用型定位追踪系统。,下面我们主要介绍Tagoram系统在输送机和装配任务方面的应用,以演示该系统如何运行。Tagoram技术适用于各种各样的追踪应用,包括机器人操作。
3.1应用范围
超低成本的超高频标签(5-10美分/枚)已经成为工业应用领域的首选。因此在本文中,我们专注于研究超高频标签的定位追踪问题。目前商业读写器的工作范围大约为10m[12]。在这样研究工作中,我们仅关注标签在低速移动过程中的定位与追踪。这是因为我们曾进行过类似的实验[13],当标签快速移动的时候,系统会出现严重的丢包问题,这甚至会导致出现无法检测获得标签中的数据的情况。因此我们的Tagoram系统目前仅适用于标签以一个相对较低的速度运动的情况。
3.2问题定义
我们认为该系统追踪移动RFID标签的工作原理如下,标签在监测区域内移动,受M个RF天线的监测,这些天线分别表示为A = {A1, A2, · · · , A M},天线位置已知。这些天线连接着同一个读写器,以轮询调度算法的方式,分别在不同时间段内工作[14]。为简便起见,我们用A m来指代第m个天线以及它的坐标。我们这一套方法主要是用在2维监测区域,但是它同样可以很容易扩展到3维空间(稍后会在4.3部分进行讨论)。监视平面被划分成W行L列的网格。假设读写器已经对天线组读取过N轮数据,那么一共测得M×N个相位值。一般的,我们用Θ矩阵来表示这些测量数据。
θm,n表示第m根天线的第n个相位值,除此之外,我们还记录了与测量相位值相对应的时间戳。
t m,n表示标签被第m个天线进行第n次查询获取相位值的时间。时间矩阵T 是基于时间t0的正规矩阵。在t0的选择上没有什么特定的约束条件,在本文中我们总是取标签首次被查询的时间作为基准时间t0,即t0=min{t m,n}。∆m,n是每次查询时间与基准时间的时差,即
∆m,n=(t m,n - t0)。我们正式地将追踪问题定义如下:
问题1. 给定Θ,T和A,如何找出标签的轨迹坐标,即对任意的查询时间t M,N,如何求得{f(t1,1),f(t1,2),…,f(t M,N)}。在这里f(t)是以时间t为自变量的轨迹坐标函数。
轨迹trajectory是时间序列的函数,表示移动物体通过空间时留下的痕迹,这里强调了时间与空间的关系。为了避免相关概念的混淆,我们定义了另一项,track,表示标签可能的移动路径。track是一个几何函数,可能会形成一个闭环传送带,一个穿过建筑物的通道,或者一段公路。track函数可能是一个复杂的分段函数,但与时间无关。
3.3解决方案
在本文中,我们提出了一个完整的系统,Tagoram,来解决实时追踪标签的问题。Tagoram系统分解为两个部分。
可控的情况下:首先我们考虑简化的情况:标签沿着已知轨迹以一个恒定速度移动。这种情况大多数出现在传送带或者工厂流水作业线上,物体沿着预定轨道运送。那么轨迹trajectory函数可以表示为:


其中为速度函数。注意到轨迹trajectory函数可能会使用到更复杂的模型,但是总是可以抽象为上述方程。f(t0)是标签在t0时刻被查询时标签的位置,称之为初始位置。只要获得标签在t0时刻的位置的估计值(即f(t0)),那么利用方程(4),同时结合track函数,可以推断出标签在任意t时刻的位置。因此,在这种情况下的主要任务即时确定标签的初始位置f(t0).我们将在第4部分提出我们的解决方案。
不可控的情况下:然后我们考虑了更一般的情况,即Tagoram系统事先并不知道标签的运行轨迹。由于高效的防冲突能力(RFID防碰撞算法),我们能在高频率下观察到标签发出的信号。我们利用连续相位值之间的差异(差分)获得了近似的标签进行不规则且不可预知运动的轨迹。然后我们使用第5部分引入的方法来确定一组可能的标签移动轨迹,从中选出最优轨迹,将问题转化为第一种情况下的问题(即轨迹已知)。
4.已知标签移动轨迹
在本节中,我们讨论第一种情况,物体在传送带或者装配线上根据已知的轨迹函数以恒定速度移动,计算出附着在物体上的标签的移动轨迹。
4.1使用虚拟天线矩阵
标签沿着一条已知的轨迹移动,M个物体天线会在在n个不同时间段{t m,,1t m,2,…t m,n}查询标签。我们采用如下方式观察标签的运动:假设标签固定在初始位置f(t0),不做任何运动,而每个天线沿着已知轨迹相对于标签作―反向运动‖。因此查询到的相位值Θ可以假设为虚拟天线矩阵A的相位值,虚拟天线矩阵A表示为:
虚拟天线A m,n表示真实天线A m对第n次查询标签,它相对于标签的坐标可由如下公式计算:

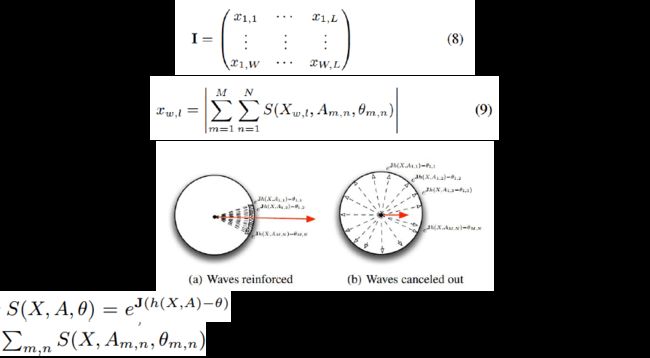
虚拟天线集合{ A m,1,A m,2,…A m,n}有相同的多样性c。图3对上述假设进行了举例说明,在这个例子中,移动标签分别被两个天线查询了4次。标签首次被查询是在初始坐标f(t0),在这个例子中t0时刻即t1,1,。整个虚拟天线矩阵包含了8个虚拟天线。其中虚拟天线A1,1代表的就是真实天线A1。

图3 虚拟天线矩阵
(标签移动方向从右到左。整个天线矩阵由8个虚拟天线构成)
4.2 RF全息图
标签在天线矩阵中移动,会对每一个矩阵单元提供独一无二的相位值,因为他们相对于标签的距离和方向也是独一无二的。监测平面被划分成W×L规模的毫米级网格(网格单元的尺寸小于1cm)。对每个网格,我们使用它的几何中心作为它的坐标。我们利用这些天线在各自扫描时间段观测到的RF相位值建立一个RF全息图,从而推导出f(t0)。RF全息图是一种利用图像来表达可能性的方法,即监测平面上的某个网格单元是标签初始位置的可能性。我们从简单全息图解决方案开始,建立我们的技术,接着提出可以解决热噪声和标签多样性这些负面影响的技术。
简单全息图:h(X,A)表示一个理论相位值,即信号从天线A发出经网格X反射回来时测得的相位值。如果忽略多样性项,那么h(X,A)可以定义为:
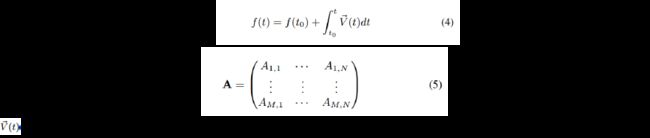
其中|XA|表示A与X之间的欧几里得距离。一个射频全息图I可以表示为如下:

。简单全息图全息图I拥有W×L的分辨率,其中每个像素x w,l∈I对应网格X w,l的定义如下:定义1 (简单全息图)简单全息图是这样一幅图,图中的每一点像素值x w,l代表了相应网格X w,l 是初始位置的可能性,像素值x w,l可由如下公式计算得到:

其中。J表示虚数,e Jθ表示单位振幅的复指数信号。
像素值代表了叠加波(M×N个波进行叠加)的振幅。这里必须注意的一个关键点是,所有相位测量值被认为是来自同一个初始位置,因为我们使用了虚拟天线矩阵。如果X网格处就是标签初始位置,那么在该网格处测得的相位值就应该等于理论相位值。当h(X, A)−θ趋近于0时,信号e J(h(X,A)−θ)的矢量会不断接近于实数轴的正方向。将所有从不同天线上获得的观测值相叠加,如图4(a)所示。否则当网格X不是初始位置,h(X, A) –θ会属于区间[0, 2π]中的某个值,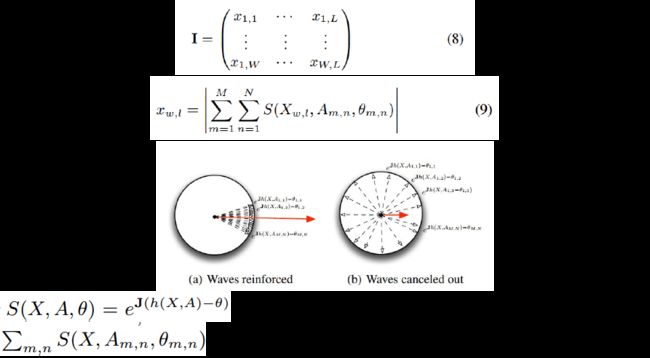
不同的S(X, A, θ)之间会相互抵消,结果导致这些值的叠加
最终会获得一个很低的值,如图4(b)所示。
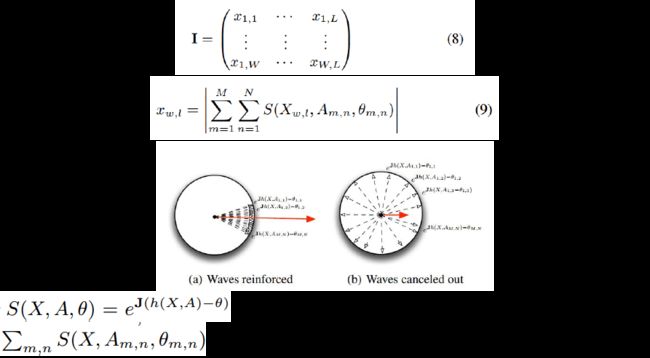
(a)波形叠加后增强(b)波形叠加后抵消
图4 不同天线的观测值相互叠加
为了详细说明RF全息图,我们进行了如下实验研究:将两个天线放置于一条传送带旁边,标签移动经过监测区域(第7部分将会详细描述具体的方法步骤)。在我们的实验中,一个标签在读写器工作范围内移动,期间两个天线对标签一共进行了220次相位值查询,因此我们对应的建立了一个2×220的虚拟天线矩阵。标签实际的初始位置f(t0)=(108,68)。简单全息图和相应的3D网格结构如图5(a)所示。图中浅色表示低振幅值。在本文中所有表示可能性的图表已经经过标准化处理。从图中我们可以看到在接近于目标位置f(t0)的网格位置,由于信号叠加的正向效果越来越明显,表示可能性的颜色也越来越深。另一方面,当网格位置远离f(t0)时,进行的是随机相位角的信号叠加,叠加后的总值会明显的变低。全息图I表明标签的似然函数存在于每一个可能的网格位置。RF 全息图利用统计学的相关性找到最优解而不是去追求精确的解析解,精确的解析解在实际中可能是不存在的。
增强全息图:
我们定义全息图中的像素值的峰值信噪比(PANR)如下: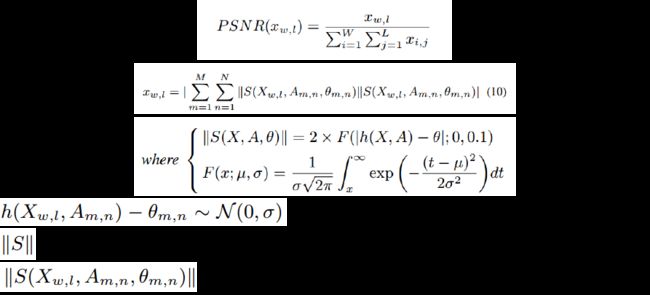
某个像素的PSNR越高表明对应网格是初始位置的可能性越大。在实际中,由于热噪声的影响,很难通过利用确定最大PSNR值的方式来捕捉精确的初始位置。如图5(a)所示,像素(122,35)拥有最大PSNR,然而它与实际初始位置相差358mm。因此我们必须将所有PSNR大于某个预定阈值的像素都考虑在内,作为候选解。候选解的数量决定追踪误差的大小。正如图5(a)所示,全息图不能给出初始位置的唯一解,而是存在一片PSNR值相对较高的连续区域。
在简单全息图中,信号e J(h(X,A)−θ)的振幅被统一设定为1,这是由于标签处于多路径反射环境中,测量得到的振幅,也就是接收信号强度(RSS),会显著地扭曲失真。正如前文所述,相位测量值θm,n受热噪声的影响,是一个遵循典型高斯分布的随机变量,即θm,n∼N(µ, σ)。假设标签处于网格X w,l处,那么天线A m,n测得的相位值表示为h(X w,l,,A m,n),因此 标准差σ由接信号收处的热噪声引起,与距离无关。基于第2部分提到的实验,我们在下文中采用σ= 0.1。为了降低接收处热噪声的影响,我们提出了增强全息图的方法,即引入一个虚拟振幅。
标准差σ由接信号收处的热噪声引起,与距离无关。基于第2部分提到的实验,我们在下文中采用σ= 0.1。为了降低接收处热噪声的影响,我们提出了增强全息图的方法,即引入一个虚拟振幅。
定义2(AH)增强全息图是这样一幅图,像素值x w,l 可通过如下公式计算得到:
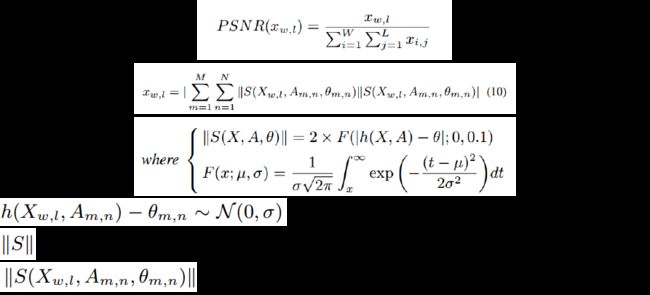
其中F(x; µ, σ)是高斯分布N(µ, σ)下的累积概率函数。

引入的振幅代表了信号从天线A m,n发出,在网格X w,l处背向散射回来的累积可能性。这样做增强了那些初始位置可能性较高的网格的波形,而削弱其他位置的波形。实际应用中发现,那些相位测量值非常接近于理论值的像素确实在全息图中得到了增强。图5(b)描述的增强全息图利用了与图5(a)同样的观测数据,我们看到引入AH算法后可以打碎那些高PSNR 值的连续区域,只留下几个点,优化了初始位置的计算方式。
差分增强全息图:
我们从增强全息图中发现,围绕着真实初始位置周围,仍然有一些具有高PSNR值的候选初始位置。这些点与真实初始位置的误差约为200mm。我们相信这些误差主要是由于不同天线间的设备多样性造成的。测量相位值θ应该等于h(X, A) + c。假定标签初始位置为网格T,那么
理论上,当X=T时,会出现最大振幅。但是实际上,当能量在天线与网格X之间传播时,h(X, A) =h(T, A)+ c。由于每个天线对c的影响程度不一样,因此未校准的θ违反了我们的基本假定,即每个天线测得的相位值仅与初始位置有关。为了消除多样性造成的影响,我们更进一步提出了差分增强全息图(DAH),
Tagoram DAH 射频全息图 利用商业化产品对移动射频标签进行实时高精度追踪
重新定义了一个虚拟信号。
定义3(DAH)
在差分增强全息图中,像素值通过如下公式计算得到:
虚拟信号利用了相位差的差分。我们重建了一个虚拟信号。注意到(h(X w,l, A m,n) − θm,n) − (h(X w,l, A m,1) − θm,1)= (h(X w,l, A m,n) − (h(T, A m,n) + c)) − (h(X w,l, A m,1) −(h(T, A m,1)+c))= h(X w,l, A m,n)−h(T, A m,n)+h(T, A m,1)−h(X w,l, A m,1)。在这里,消除多样性c的关键在于,我们将A m,n 与A m,1的测量相位值与理论相位值之间的差值进行相减。因为虚拟天线矩阵A m,n的每一行来自于同一个天线A m,相位测量值的每一个行θm,n来自于同一天线A m。因此对不同行,我们均分别采用减法。对每一行,我们选择第一个虚拟天线作为校正标准。此外,θdif引入了两个随机变量θm,n与θm,1之间的减法。注意到(h(X w,l, A m,n) − θm,n) ∼N(0, σ),h(X w,l, A m,1) −θm,1) ∼N(0, σ),因此θdif∼N(0, √2 × σ),即我们设置累积概率函数的标准差σ为0.1×√2而不是0.1。此外,引入相位差的另一个好处是可以消除多普勒效应的影响,因为θm,1∼θm,n几乎包含了所有多普勒效应引起的微小采样间隔间的同等相位偏差。图5(c)显示了DAH算法得到的非常准确的初始位置判断,该位置处PSNR的值明显得到了增强,数值几乎是其他像素的2倍,误差可以减少到10mm以内。
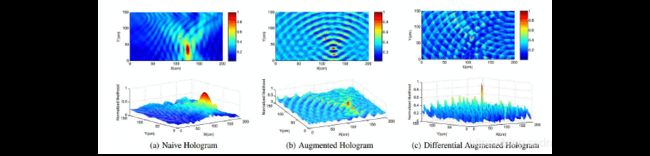
图5 RF全息图
RF全息图通过图像的方式形象的表达了某个网格是初始位置的可能性的大小。真实初始位置就是平面图中的加号,我们通过二维图与三维网格的方式演示了3种全息图。
4.3实现实时追踪
DAH算法可能会因为引入太多的―计算成本‖从而危及到实时追踪能力。如果是进行三维空间的追踪而不是二维平面的追踪,这方面的问题将会更加严重。假设读写器的监测区域是一个W ×L×H的长方体,那么监测区域被分割为H个平面,每个平面为W × L的长方形。那么初始位置就要从H个全息图中提取,即从H个全息图中选出PSNR值最高的像素点。与2维情况相比,3维情况需要的计算次数会增加成千上万次。
4.3.1相位值的哈希表
回顾图5(c)中的二维全息图,我们全息图中大多数像素属于低PSNR值(蓝色),那么与之相关的计算是不必要的。如果忽略掉这些像素点那么将大大节省计算时间。实际上,给定一个测量相位θm,n,我们可以找到一组从天线A m,n发出的弧线,如果网格X在弧线上出现h(X, A m,n) = θm,n的情况,那么我们将这些网格称之为候选网格。明显的初始位置不会位于非候选网格中。这启发我们寻找一种方法来快速排除这些候选网格同时忽略掉其他非候选网格,以节省计算时间。我们利用哈希表实现了这个想法。
哈希表结构:首先假设天线位于原点,解决了这个问题之后,我们遍历每个在读写器检测区区域中的网格,计算从原点发出经X背向反射的相位值θ,将这些网格的相位值存入哈希表。商用读写器支持0.00015弧度的相位分辨率,相位采用12为编码格式,因此每个相位值哈希表最多可包含212=4096条记录。
应用:应用时,天线坐标A m,n和它的相位测量值θm,n被放入哈希表中。使用λm,n和θm,n可以从哈希表中获得一组候选网格,即C m,n = {X|h(X,0) = θm,n}。然而,由于热噪声的影响,测量相位值会有一个标准差σ(弧度)的摆动。为了将摆动限制在容忍范围内,所有网格的计算相位值在[θm,n−σ, θm,n+σ]区间的都需要考虑为候选网格,即C m,n = {X||h(X,0) − θm,n| ≤ σ}。哈希表建立在天线处于原点的假设上,然而实际中天线位于A m,n 点,因此我们必须将原点转化为A m,n点。
这就相当于将选定网格X转化为附加了一个向量A m,n的情况,即,即。理论上初始位置必须是这些候选集中的公共网格。然而,由于多路径反射效应,这些候选集中可能不
会存在交集,也就是。因此我们规定,所有存在于至少三个候选集中的候选网格都要用来生成全息图。
哈希表减轻了两方面的计算任务:第一,占绝大多数的非候选网格可以忽略掉。第二,我们的实验表明,70%的计算时间都耗在了解决h(X, A)的欧几里得距离上。然后哈希表的提出不再需要这部分的计算。我们的评估显示,哈希表可以减少60%的计算工作。
4.3.2全息图的递增生成
一旦收集到了足够的相位测量值,似乎就可以生成完整的全息图,实际上全息图的生成是一个递增的过程。方程(12)的总和可以分解成M × N 个分全息图的叠加。相应的,计算可以分解成许多时间间隔,每一个时间间隔内会收集到一条读数。通常的,标签每一秒钟被查询30次,因此时间间隔等于0.03秒,这对于生成一个分全息图来说足够长了。因此,我们的方法能够保证实施追踪物体移动达到秒级水平。
5.标签移动轨迹未知
在这部分中,我们放宽了假设,即标签的轨迹函数未知。Tagoram采用如下两个步骤来处理物体运动不可预测的情况:
匹配标签移动轨迹:在预置天线组的每一轮查询中,Tagora通过M个天线从不同方向获得相位测量值,根据获得的相位值匹配标签可能的移动轨迹。
选择最优轨迹:Tagoram利用DAH算法评估所有可能的移动轨迹,从中选出最优的那个,最优轨迹对应的像素值同时也应具有最大的PSNR值。
下面我们详细描述这两个步骤:
5.1匹配标签移动轨迹
在商用RFID系统[12]中一个标签被查询30次/秒,最先进的自动分拣系统[15]支持274.8mm/s的最大承载速率。那么平均的,在每次查询的时间段内,标签运

动距离为274.8* =9.16mm,这一段距离远远小于可用频道波长的一半(≈160mm)。这一特性启发我们,可以通过两个邻近读数之间的相位差推断出标签的径向速度。如图6所示,标签在天线A m的两个邻近读数θm,n和θm,n+1的位移∆d可通过公式(1)推到得到,具体如下所示:
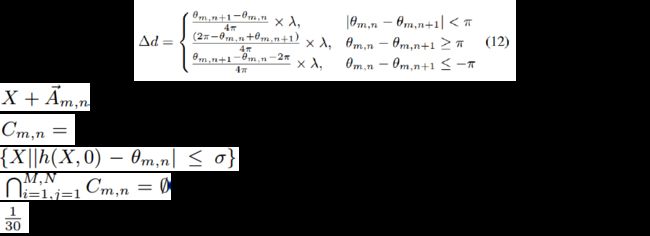
因为上述方程计算的相位差用到的是同一个天线m,所以天线的多样性项c已经被消掉。另一方面,因为∆d ≪ |f(t m,n) − A m|,因此可以将标签沿着A m→ f(tm,n)径向的位移约等于∆d。更进一步的,径向瞬时速度可以通过如下公式计算得到:

∠X是向量X的方向,定义为向量与x轴的夹角。出于完整性的考虑,我们给定了标签移动速度的上限,即160mm/0.033s=484.9mm/s。
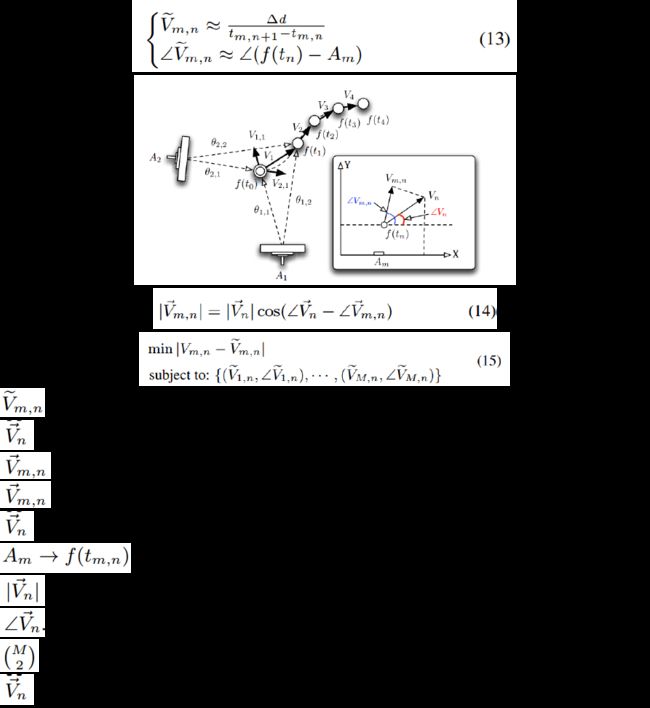
图6 标签移动模型
(每个天线估计一个标签的径向速度分量,以及它们之间的方向)
速度链:有m个真实天线监测整个监测区域,所以在每轮我查询中们可以估算出m个即时径向速度。由于两个邻近读数之间的位移差距十分微小,因此我们可以将标签的弧形移动轨迹简化为一小段一小段的匀速直线运动。通过分段线性曲线的方式可以很好的近似描述整个移动轨迹。如图6所示,表示标签在第n轮查询时的真实速率,表示第n轮查询时第m个天线测量得到的径

向速率。实际上,是速度在方向上的投影,即:

上述方程有两个位置参数,标签的速度大小和方向。理论上,给出任意两个不同方向上的估计径向速度,可以求得这两个参数。通常的,一个典型的商业RFID系统提供的天线数M ≥ 3,这样会得到个解。因此我们采用拟合的方法估计这两个参数。问题的正规化表达如下:

我们采用非线性最小二乘法来估计标签在第n轮查询中的瞬时速度,
使用高斯牛顿法线性逼近邻近参数向量的目标函数。我们从参数向量的一个初始近似值开始,迭代更新参数向量的值直到它收敛于目标函数的局部最小值。天线组每一轮查询结束时,会获得一组测量值,同时匹配出标签在本轮查询中的移动速度。假设一共进行了N轮查询,那么就会获得一条标签速度链:

轨迹函数:我们讲标签的轨迹分割成一系列统一的线性运动,每一轮查询就代表一段。那么标签轨迹可由如下递归方程近似获得:

其中只要我们知道初始位置f(t0),那么标签的轨迹就可以通过递归的方式推断得到。注意到我们可以对这一方法进行优化,例如可以使用卡尔曼滤波器[10]来解决测量噪声的问题,本文由于篇幅的限制就不对此进行讨论。
5.2选择最优轨迹
虽然可以通过方程(16)近似计算出轨迹,但是仍然存在一个未知参数f(t0),也就是初始位置。给定任意的f(t0),不管怎样Tagoram都可以匹配出轨迹。选择不同的网格作为初始位置可能会导致获得不同速度链,进而产生不同的轨迹。到底哪一个才会接近真实情况的最优解呢?我们利用DAH算法来回答这个问题。与第4部分中提到的追踪初始位置类似,我们假定 f(t0) = X w,l,然后匹配得到一条轨迹f w,l。那么就会有W ×L条候选轨迹。我们利用DAH算法叠加所有沿着f w,l到f w,l(t0)相位测量值,就跟追踪初始位置的过程一样。我们利用这一理论的基础是,如果某条匹配轨迹最接近于实际情况,那么在它在初始位置叠加的振幅会是所有W × L条候选轨迹中的最大振幅。最终,我们选择具有最大PSNR值的轨迹作为最优轨迹。
6.实现
我们利用 ImpinJ读写器[12]和国外的 EPC Gen-2超高频RFID标签[16]建立了Tagoram。我们实验室评估了这个系统并进行了长期试点研究。
硬件:我们采用ImpinJ高速读写器R420,并且没有对任何硬件和固件进行过修改。读写器最多可支持4个定向天线,同时兼容EPC Gen2标准。整个RFID 系统采用无线跳频技术运行在920~26MHz频率带。天线尺寸为225mm×225mm×40mm。读写器与主机通过无线网络进行通信(TCP/IP)。它拥有本地时间,对每个标签读数都会附加时间戳。我们采用数据提供的时间戳而不是接收时间作为时间测量参数来计算相位值,以消除网络延迟造成的影响。四个天线具有圆偏振,由永奕科技公司[17]制造,在两个不同方向上可提供≥ 8dBic的天线增益。两种类型的标签来自外国公司[16],即2 × 2 模式化镶嵌和任意镶嵌。以上这些都用在了实验室试验和试点研究。
软件:我们采用用LLPR协议[18]在读写器上进行通信。ImpinJ读写器扩展了此协议以支持导出相位值。我们调整了读写器的配置,每当检测到标签时,立即导出相位值读数。软件部分是通过Java语言实现的。在我们实验室中,我们利用一台联想电脑运行软件,电脑配置为英特尔G530CPU和2G内存。在试点研究现场,我们利用工控机运行软件,工控机配置,凌动处理器,2G内存和16GSSD。
7.微基准测试
我们在实验室的试验平台环境下对两种情况进行了微基准测试,即可控情况和不可控情况,并与其它方法进行了比较。
7.1可控情况下的评估
我们利用一个玩具火车模拟移动的物体,将标签附着在玩具火车上,火车以恒定速度0.176m/s在轨道上移动。由于任意的轨迹可以分解成线性及弧形轨迹,因此我们主要关注这两种基本的轨迹。
线性轨迹追踪:两个天线分别放置于轨道两侧,如图7(a)所示。,分别距离轨道670mm和710mm,轨道长度1300mm。标签的x轴和y轴坐标都要计算出来。注意到,在这种情况下,沿x轴(即追踪方向)的坐标的计算精度要更重要。
环形轨迹追踪:我们使用一个环形轨迹和一个RF天线来测量非线性轨迹的追踪精度,如图7(b)所示。轨迹内直径为540mm,我们将天线分别置于距轨迹圆心4000mm、1000mm和15000mm处,观察讨论这一距离对精度的影响。为了精确捕捉到标签在轨迹上的真实位置,我们在轨迹上方放置了一个快速照相机。标签首次被查询时,系统立即启动照相机拍下火车快照,这就是标签的初始位置。在计算过程中,标签和天线都以它们的形心点代替。
7.1.1不同测量方法的精度
首先,我们在可控情况下进行试验,将DAH算法与其它四种定位方法相比较,比较它们的测量精度。我们分别对这五种方法进行了超过100次的测量试验。图8展示了最终的测量结果,其中包含了x轴、y轴以及整合精度,这五种方法分别是RSS、OTrack、PinIt、BackPos和DAH。
RSS:利用一对标签接收信号强度(RSS)的差别作为这两个比标签空间距离的指标[2]。基于RSS距离理论,可以识别出与参考标签最邻近的目标标签。因此在实验过程中,参考标签放置于轨道旁边。由于标签状态在实验过程中会高速变化,例如天线增益和标签方向的高速变化,RSS算法的综合误差达到了600mm。
Otrack[3]: 设计一种方法通过改变RSS和读取率来决定行李顺序。这个方法关注的是物体的传送顺序,因此不涉及到y轴的精度。 OTrack 的平均误差在150mm,相比于RSS算法误差减少了75%。
PinIt:PinIt [6] 利用合成孔径雷达(SAR)的方法,通过天线运动来对每个标签提取多路径剖面图,与RSS算法一样,利用参考标签来确定目标标签的位置。PinIt 的平均误差为120mm,与文献[6]报道一致,使用了10枚参考标签,每一枚标签相距130mm分开放置。PinIt不适合用于移动的情况,因为快速变化的环境违背了标签多路径剖面图的原则,即时运动幅度非常微小。此外,在传送带或者装配线上放置大量的参考标签也是不切实际的,即时放置好了,它们的移动起来后的位置也很难预知。
BackPos:BackPos[9]是一种基于相位的方法,通过引入双曲线定位技术进行RFID定位。综合误差的平均值为400mm,标准差为200mm。BackPos是一种无锚节点定位技术,但是以牺牲可行域面积为代价。
DAH:在线性轨迹追踪上,我们的DAH算法的平均定位误差分别为:x轴5mm,y轴13mm,综合误差14mm,相比于RSS、 OTrack、PinIt 和BackPos定位精度分别提高了43倍、11倍、8.5倍和28倍。定位精度的明显改善得益于我们细心考虑并处理了热噪声及设备多样性的问题。除了OTrack方法以外,所有方法沿x轴的精度都比y轴精度高。这是因为标签的主要移动方向为沿x轴方向,沿x轴产生的位移比y轴大得多。这就证实了标签的移动性可以提高追踪精度。由于DAH利用了不同方向的统计结果,追踪精度也更稳定,换句话说,标准差≈ 2mm。图9绘制了DAH在环形轨迹上的误差测量精度的CDF(累积分布函数)图。DAH可以达到如下误差水平:x轴4.14mm,y轴4.98mm,综合误差7.28mm。相比于上述其他四种方法精度分别提高了82倍、21倍、16倍和55倍。显然,DAH在环形轨迹上的误差比直线轨迹要低,因为在环形轨迹中,标签在x轴和y轴两个方向上的位移几乎是一样的,因此沿着x轴和y轴的误差几乎是一样的。
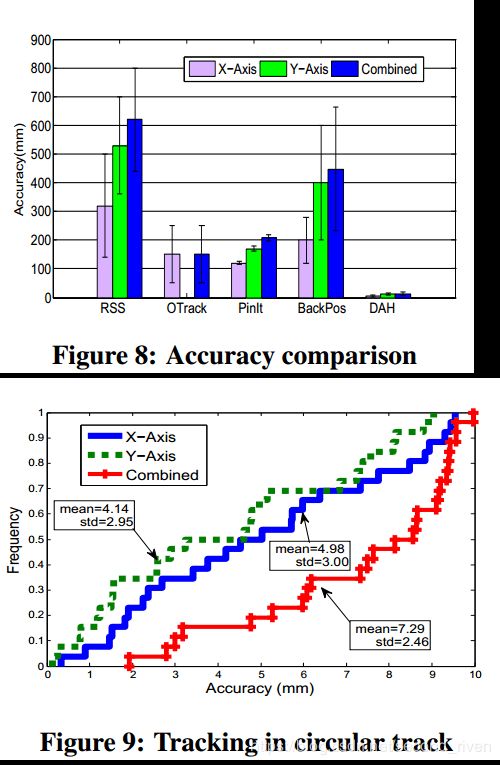
图8 精度比较图9 环形轨迹上的追踪总结:DAH利用商业RFID产品,在可控环境下,能够达到mm级别定位精度且性能可靠。我们的DAH算法从三个方面显著改善了了定位精度。第一,DAH小心地处理了热噪声和设备多样性造成的影响。据我们所知,我们是第一个解决了这两个问题的团队。其他的基于相位的算法,例如PinIt和BackPos,为了消除多样性,首先必须要进行一组标定校准实验,然后才能进行的定位追踪。然而这在实际中是不可行的,特别是当我们面对的是成千上万枚标签时,例如机场的行李分拣,我们不可能对所有标签进行一一校准。第二,我们注意到标签的移动性可以帮助读写器从不同方向测量标签的相位值。大多数的定位预估算法仅关注标签固定问不是移动的情况,忽略了这一重要的特性。从不同方向获得的大量测量数据利用统计学的手段可以减少多路反射效应,这是因为不可预知的无序的波传播在非视距通信下可以相互抵消,然而在初始位置上,即时是微小的视距通信传播也会增强振幅。第三,DAH算法可以消除多普勒效应,这是因为在短时间间隔(t m,1 ∼ t m,n)内由多普勒效应产生的类似影响会被DAH的有关运算减掉,即(θm,n− θm,1)。
7.1.2不同全息图的精度
现在我们可以利用线性轨迹对比NH、AH和DAH的追踪结果。图10描述了它们的定位追踪误差。正如我们看到的那样,NH平均误差为600mm,标准差100mm。AH性比喻NH克服了热噪声造成的偏差,减少了60%的偏差。DAH 更进一步地消除了设备多样性造成的影响。图中第90个百分位对应的误差距离为18mm,第99个百分位的误差距离为25mm。这些实验充分证明的DAH的有效性。

图10 不同全息图
7.1.3实时追踪性能
实时追踪是追踪应用领域一个很重要的指标。下面,我们将研究Tagoram在定位标签坐标上的时延特性。
读取时间:Tagoram生成全息图是一个渐进的过程。一旦接收到来自读写器的一个读数,Tagoram就会生成一个中介全息图,并叠加到先前生成的全息图上。当收集到足够的读数后,就会生成最终全息图。因此我们首先要做的就是测量生成一副中介全息图所需要的时间,结果如图17(a)所示。读取时间指的是读写器查询两个连续读数的时间间隔,这是产生一个中间结果(中介全息图)的上限,从图中可以看到平均读取为33ms。任何计算所花的时间如果超过这个上限可能会影响到实时追踪性能。
我们从图中可以看到,在没有进行优化的情况下,生成一副103×103分辨率的全息图平均需要花费118ms,这远远超过了读取时间的3倍不止。更糟糕的是,随着分辨率的提高,所耗时间将会翻好几倍。经哈希表优化之后,生成全息图所耗费的时间相比于读取时间总是能维持在一个较低的水平,例即时将分辨率提高至105×105,平均花费时间仅为25ms。实际上,经优化后的方法消耗的时间主要是用在从磁盘装载哈希表和进行交集运算这两方面,而这些与全息图的分辨率基本不相关,因此随着分辨率提高,所花费的时间也基本不变。精度与实时:Tagoram在收集了足够多的数据后可以输出初始位置。但是问题在于需要多少数量的读数才能获得一个精确的结果?图17(b)描述了精度与实时的关系。结果显示,当收集到超过120个读数时,输出结果会趋于稳定。因此,我们认为在收集了120个读数后输出坐标位置是合理的。
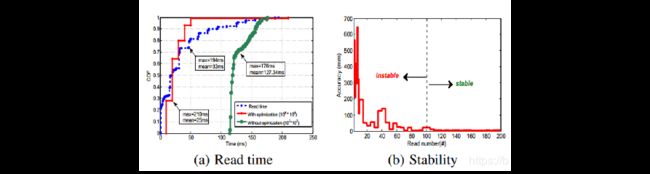
图17 渐进生成全息图
总结:关于渐进生成全息图所需要的时间,Tagoram总共需要120×25ms = 2500ms来进行全息图的计算。我们相信2.5s的延迟对大多数实时追踪应用来说是一个可以接受的水平,特别是机械系统控制方面,例如输送机或者机器人手臂。值得注意的是,实时追踪的性能部分地取决于RFID防碰撞算法的效率如何。
7.1.4参数的影响
频率的影响:一个超高频读写器的频率可在16个频道920~926MHz的ISM 波段内跳跃。我们观察频率是否会影响DAH的定位精度。图11描述了16个频道的定位精度。结果显示,DAH的定位精度与频率无关。实际上,我们都知道在无线通信中存在频率选择性衰落。无线跳频技术可以帮助提高标签与读写器的连通性。
方向的影响:标签的方向被定义为读写器天线的偏振方向与标签天线的夹角,如图1所示。为了测量标签方向对追踪结果的影响,我们从0°到360°调整标签方向,测量精度如图12所示。正如预期的那样,精度几乎维持在同一水平。
距离的影响:图13展示了在环形轨迹中,从1m到12m不同距离的追踪精度。正如我们看到的那样,第50个百分位误差为9mm,第90个百分位的误差为17mm。DAH没有明显的表现出于测量精度与距离的关系。因此,距离不是影响DAH精度的决定性因素。特别是,当将天线放置于距离轨迹中心12m处(超过了标签位移距离22倍),平均误差仅为5mm。实际上,当天线与标签处于远距离状态时,将天线视为几何形心上的点更为合理。
总结:这些广泛的实验结果证明,Tagoram系统的追踪精度与频率、方向、距离的改变无关。

图11 频率的影响图12 方向的影响图13 距离的影响
7.2不可控情况下的评估
我们接着研究了不可控情况下的追踪精度,即轨迹函数预先不知道。在这项实验组中,标签沿着不规则的轨迹进行移动如图14所示。四个天线环绕部署在监视区域,它们的坐标为(±2000mm, ±2000mm)。图14展示了轨迹以及在上面移动的玩具火车的快照。我们总共收集了5分钟的数据,在这期间标签逆时针移动了10圈。
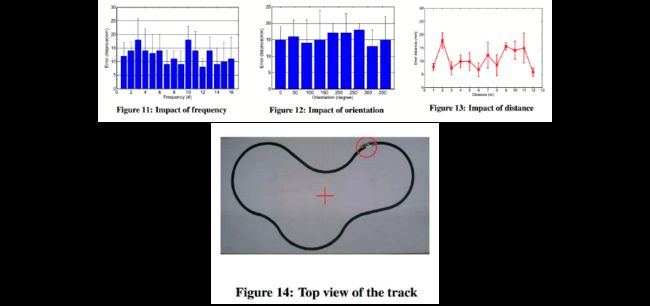
图14 轨道俯视图
首先第一步是利用四个天线测量得到的标签相位值估算出速度链。估算的得到速度如图15所示。为了清楚地显示图中的向量,我们将速度放大了1000倍,因此速度单位变为了mm/s。我们发现这些估计值在平滑部分的估算效果比弯曲部分要好,这是因为我们假定标签在一个时间间隔内只作匀速直线运动。估算得到的速度的平均值为210.2mm/s,而真实的平均速度为212mm/s。这说明Tagoram 的估算结果是非常精确的。图16显示了最终匹配的轨迹。在我们的实验中,当收集了200次读数后就会给出标签的一个位置。Tagoram的误差范围达到了平均误差12.3cm,标准差5cm的水平。
8.试点研究
我们与海南航空公司合作开发了一个RFID辅助分拣系统,称之为TagAssist。TagAssist的最终目标是能够向乘客保证,永远不会不会弄丢他们的行李。为了实现这一目标,TagAssist引入RFID技术进行自动最终行李即检测服务,以消除行李丢失的现象。TagAssist的设计与实现将能解决很多的实际问题,在关于此系统的讨论中,我们重点关注如何精确追踪一个标签在传送系统中的运动。
我们将我们的系统放置在了两个机场,北京首都国际机场T1航站楼和三亚国际机场,这两个机场以前都是采用雇佣工人的方式手动分拣行李。当乘客办理登记手续时,电脑上的客户端调出乘客的行程单,并打印一枚或者多枚RFID标签,将之附加在乘客的每一件行李上。为了节省成本,每天都有成千上万的行李被送入一个公共的传送系统中,这就导致来自不同登记柜台的行李混合到了一起。这需要人力根据航班号来对这些行李进行分类,分拣任务是在行李传送带上完成的。行李传送带由环形传送带组成,用于缓冲行李,就像大厅里的行李认领处那样(见图18(a))。直到被分拣之前,行李在传送带中一直被缓冲、堆积,我们通产会看到中间的一部分行李由于受后续行李的推动叠加到了一起,看起来就像是被―抛‖到了其他行李上面。
每一个分拣工人的任务是分拣一个航班的行李,他们沿着传送机站在行李传送带的旁边。分拣工的任务是找到某个航班的行李并从传送带上取出搬运至运输车上(如图18(b)所示)。对分拣工来说,从大量的行李中找到目标行李常常会出错。为了提高分拣的精度和效率,我们设立了四块大屏幕(如图18(e)),显示被追踪的行李的运动轨迹,协助分拣工找出目标行李。行李传送带按比例显示在屏幕上,用许多的小方块来代替这些行李。来自不同航班的行李被标示成不同颜色。在行李形象化和精确追踪的帮助下,分拣工能快速准确的看到他所负责的行李,并快速安置好这些行李。因此对分拣工来说高精度实时追踪是很有必要的,特别是在高峰期。
传送机系统有一个巨大的机械网络组成,可能会有好几百米长。沿着传送带放置上千个读写器以完全监测整个传送带是不现实的,因此我们设计并定制了一个追踪装置,叫做TrackPoint(见图18(c))。它由一个RFID读写器和3个RF 天线组成(见图18(d)),横跨在传送带上。当一个标签穿过TrackPoint时,它会被读写器反复查询,同时被Tagoram系统利用DAH算法进行定位追踪。从2013年1月开始,这一套装置已经被放置于北京首都国际机场T1航站楼和三亚国际机场,在真实的使用环境下运行,这个系统已经运行了超过一年之久。每一套放置的系统包含有5台TrackPoints(横穿在传送带上),4台可视化屏幕(在传送带旁边)和22台RFID打印机(放置在登记柜台)。到目前为止,这项研究已经耗费了11万枚RFID标签,涉及53个目的地机场,93条航线,1094次航班。我们从TrackPoints上收集到了120亿的RFID数据。每条数据包含的信息有EPC、RSS、相位值和时间戳。

(a)行李传送带(b)分拣(c)TrackPoint (d)组件(e)可视化
图18 从机场拍摄到的图片
(a)行李从登机柜台运送至分拣传送带。(b)分拣工的任务是找到行李并取出搬运至货车上。(c)一个TrackPoint横跨在传送带上。(d)TrackPoint内的主
要部件。(e)屏幕用于显示每个标签的轨迹以辅助分拣工找到他们的目标。
8.1 追踪精度
在传送系统中追踪行李属于可控情况下的定位追踪,可以采用DAH算法实现。由于TrackPoint的位置以及传动带的速度是固定的,我们提前已知,因此我们可以精确的算出一个行李从一个TrackPoint到另一个所花的时间。如果追踪精度是准确的那么推断距离应与实际距离基本一致。因此我们通过比较同一行李经过两个连续的TrackPoint,这两段连续追踪距离与理论值的差距,研究追踪精度。精度如图19(a)所示,我们发现Tagoram的平均精度可以达到6.35mm的水平。第80个百分位的误差为150mm,第90个百分位的误差为200mm。相比于微基准测试的结果,测量精度下降的原因主要是复杂多变的环境。
8.2追踪效率
分拣工作区包含了一个循环传送机用于缓冲行李。在被分拣之前,行李会在传送机上做循环运动。精确的追踪能帮助分拣工快速准确地找发哦目标行李就,减少无效劳动。因此我们采用行李在传送带上的运动距离来作为间接衡量追踪效率的一个指标。图19(b)显示了行李被分拣前的移动距离,在使用了Tagoram 后这一数据减少了30%。这表明我们的系统确实能够提高分拣效率。
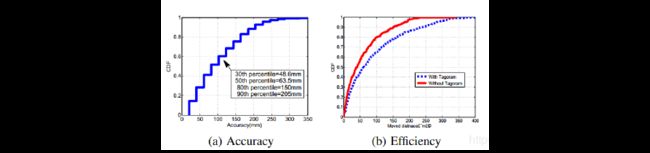
图19 追踪效率
8.3追踪的鲁棒性
在实际无线通信条件下,特别是室内环境下,信号进行无视距通信传播会引入多路径反射效应,这会影响相位测量精度。在无视距通信中,信号在遇到墙壁或其他物体时会发生反弹,
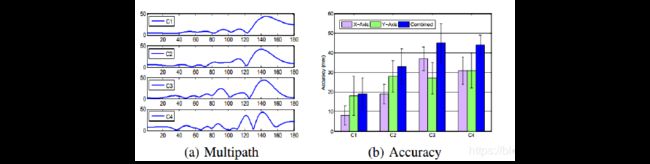
这样信号到达读写器接收端时就会来自多个不同方向。我们从不同方向(0°~180°)投射接收信号,利用文献[6]的方法形象化的展示干涉情况。四种最常见的情况画在了图20(a)上,他们相应的追踪精度见图20(b)。在第一种情况C1中,在140°、115°和90°三个方向上存在明显的传播路径,定位精度为19mm,并没有受到太大影响,但是随着传播路径数量的增加,精度确实受到了一些影响。C4代表了最复杂的环境,有超过7条传播路径,其中20°和140°方向上的振幅
与真实位置几乎一样。即使在如此复杂的条件下,定位精度仍然能够保持在60mm以内。这说明Tagoram系统对多路反射效应具有很强的耐受性。
(a)多路径(b)精度
图20 多路径下的追踪鲁棒性
9.相关工作
高精度RFID定位技术到目前为止已经得到了充分研究。这些方法总的来说可以分为三类。
基于RSS的方法:早期的RFID定位技术都是基于RSS的方法。RSS的参考标签放置在已知位置,用于定位目标标签[2-5,19]。然而,RSS并不是一个可靠的定位指标,特别是对于超高频标签来说,这是因为RSS技术与标签的方向及天线增益高度相关[4]。在标签移动的情况下,标签方向可能是未知的。
基于相位的方法:研究者们对于利用相位信息定位标签的方法越来越感兴趣。基于相位的方法可以分为两类,AoA(到达角度测距)和SAR(合成孔径雷达)。AoA通过测量不同天线接收到的信号的相位差来定位标签[5,7,8]。这一类方法的主要问题在于难以处理非视距通信的情况。SAR利用天线矩阵,首先应用在雷达系统上,用于定位物体和地形成像[1,6,20,21]。PinIt [6]利用移动的天线来测量参考标签在已知位置的多路径剖面图,用以定位目标标签。PinIt 技术更进一步地应用在了机器对象操纵方面[1]。PinIt的优点在于能够在非视距环境下定位标签。然而,这项技术需要事先放置数量众多的参考标签。Miesen等人[20]也通过利用移动的天线构建SAR系统,在简单全息图上找到了标签的位置。Parr[21]扩展了文献[20]中提到的技术,在移动的情况下确定标签是否沿着某条假定的轨迹移动。而Tagoram利用标签的移动性生成了相反的SAR天线矩阵,这明显不同于以前的方法,标签的追踪精度可以达到mm级精度,同时很好的处理了热噪声及设备多样性的问题。此外,Tagoram能够在不可控情况下即轨迹函数未知的情况下,追踪标签的移动轨迹。
接近法:最后一种方法是基于邻近的方法[22-27]。这种方法依赖于天线的稠密布置。当目标标签进入某个天线的无线电监测范围的时候,对这个天线来说,标签的位置被假定为不变。Liu等人提出了一种新的通信系统,实现了两个无源设备之间仅靠周围的RF信号作为能量就可以通信。这也许会发展成为一种新型的厘米级定位追踪技术[25]。
10.结论
在本文中,我们提出了Tagoram系统,利用商业的RFID标签和读写器实现对移动标签的实时追踪,并达到了很高的精度(cm和mm级)。创新点在于我们利用物理天线上收集到的相位值建立了差分增强全息图,利用标签移动性建立了虚拟天线矩阵。Tagoram能准确给出标签的位置,误差仅为几厘米,这样一个精度水平达到了某些特别应用领域的要求,例如机器人抓取物体。Tagoram系统不仅在实际中进行了测试与应用,而且会开创出许多令人兴奋的应用领域,因为它可以实现高精度实时追踪。
11.致谢
这些研究的部分经费支持来自国家自然科学基金No. 61190110和NSFC CERG-61361166009。李向阳的部分经费支持来自于NSF CNS-1035894, NSF ECCS-1247944, NSF ECCS-1343306和国家自然科学基金No. 61170216, No. 61228202。李默的研究经费由新加坡教育部和南洋助理教授经费支持。我们感谢所有的审稿人和指导者,感谢他们提出的宝贵评论和建议。
- 参考文献
[1] J. Wang, F. Adib, R. Knepper, D. Katabi, and D. Rus, ―Rf-compass:robot object manipulation using rfids,‖ in Proc. of ACM MobiCom,2013.
[2] L. Ni, Y. Liu, Y. Lau, and A. Pa til, ―Landmarc: Indoor location sensing using active rfid,‖ Wireless networks, 2004.
[3] L. Shangguan, Z. Li, Z. Yang, M. Li, and Y. Li u, ―Otrack: Order tracking for luggage in mobile rfid systems,‖ in Proc. of IEEE INFOCOM, 2013.
[4] J. D. Griffin and G. D. Dur gin, ―Complete link budgets for backscatter-radio and rfid systems,‖ IEEE Antennas and Propagation Magazine, vol. 51, no. 2, pp. 11–25, 2009.
[5] C. Hekimian-Williams, B. Grant, X. Liu, Z. Zhang, and P. Kumar, ―Accurate localization of rfid tags using phase difference,‖ in Proc. of IEEE RFID, 2010.
[6] J. Wang and D. Katabi, ―Dude, where’s my card?: Rfid positioning that works with multipath and non-line of sight,‖ in Proc. of ACM SIGCOMM, 2013.
[7] S. Azzouzi, M. Cremer, U. Dettmar, R. Kronberger, and T. Knie, ―New measurement results for the localization of uhf rfid transponders using an angle of arrival (aoa) approach,‖ in Proc. of IEEE RFID, 2011.
[8] P. V. Nikitin, R. Martinez, S. Ramamurthy, H. Leland, G. Spiess, and K. Rao, ―Phase based spatial identification of uhf rfid tags,‖ in Proc. of IEEE RFID, 2010. [9] T. Liu, L. Yang, Q. Lin, Y. Guo, and Y. Liu, ―Anchor-free backscatter positioning for rfid tagswith high accuracy,‖ in Proc. of IEEE INFOCOM, 2014.
[10] S. Sarkka, V. V. Viikari, M. Huusko, and K. Jaakkola, ―Phase-based uhf rfid tracking with nonlinear kalman filtering and smoothing,‖ IEEE Sensors Journal, vol.12, no. 5, pp. 904–910, 2012.
[11] ImpinJ, ―Speedway revolution rea der application note: Low level user data support,‖ in Speedway Revolution Reader Application Note, 2010.
[12] ―Impinj, Inc,‖ http://www.360docs.net/doc/info-c19c44d13968011ca2009195.html /.
[13] P. Zhang, J. Gummeson, and D. Ganesan, ―Blink: A high throughput link layer for backscatter communication,‖ in Proc. of ACM Mo biSys, 2012.
[14] L. Yang, J. Han, Y. Qi, C. Wa ng, T. Gu, and Y. Liu, ―Season:Shelving interference and joint identification in large-scale rfid systems,‖ in Proc. of IEEE INFOCOM, 2011.
[15] ―Dematic,‖ http://www.360docs.net/doc/info-c19c44d13968011ca2009195.html /linear-sorters.
[16] ―Alien,‖ http://www.360docs.net/doc/info-c19c44d13968011ca2009195.html /tags.
[17] ―Yeon,‖ http://www.360docs.net/doc/info-c19c44d13968011ca2009195.html /.
[18] EPCglobal, ―Low level reader protocol (llrp),‖ 2010.
[19] G. Li, D. Arnitz, R. Ebelt, U. Muehlmann, K. Witrisal, and M. V ossiek, ―Bandwidth dependence of cw ranging to uhf rfid tags in severe multipath environments,‖ in Proc. of IEEE RFID.
[20] R. Miesen, F. Kirsch, and M. Vossie k, ―Holographic localization of passive uhf rfid transponders,‖ in Proc. of IEEE RFID, 2011.
[21] A. Parr, R. Miesen, and M. Vos siek, ―Inverse sar a pproach for localization of moving rfid tags,‖ in Proc. of IEEE RFID, 2013.
[22] W. Zhu, J. Cao, Y. Xu, L. Yang, an d J. Kong, ―Fault-tolerant rfid reader localization based on passive rfid tags,‖ in Proc. of IEEE INFOCOM, 2012.
[23] Y. Liu, L. Chen, J. Pei, Q. Chen, and Y. Zhao, ―Mining frequent trajectory patterns for activity monitoring using radio frequency tag arrays,‖ in Proc. of IEEE PerCom, 2007.
[24] Y. Guo, L. Yang, B. Li, T. Liu, and Y. Liu, ―Rollcaller: User-friendly indoor navigation system using human-item spatial relation,‖ 2014.
[25] V. Liu, A. Parks, V. Talla, S. Gollakota, D. Wetherall, and J. R. Smith, ―Ambient backscatter: Wireless communication out of thin air,‖ in Proc. of ACM SIGCOMM, 2013.
[26] Y. Zheng and M. Li, ―P-mti: Physical-layer missing tag identification via compressive sensing,‖ in Proc. of IEEE INFOCOM, 2013.
[27] L. Yang, Y. Qi, J. Fang, and et al., ―Frogeye: Perception of the slightest tag motion,‖ in Proc. of IEEE INFOCOM, 2014.