机械臂建模与仿真(一):创建机械臂的urdf模型描述文件
要做机械臂的控制,就会用到机器人的urdf描述文件,moveit需要根据urdf中的数据进行机械臂的路径规划.
准备工作: 创建工作空间,在src下创建six_arm功能包(见相关ROS基础入门)
1.创建ros package命名为six_arm
catkin_create_pkg smartcar std_msgs rospy roscpp urdf
2.建立文件夹launch和urdf分别用来存放.launch文件和.urdf文件
3 在six_arm文件夹下建立urdf文件夹,创建机械臂的描述文件six_arm.urdf
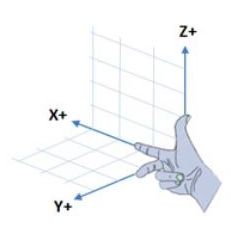
首先要注意的是在ros中使用的右手坐标系,所以描述文件中的数据都是以此坐标系为原则
描述代码如下:
<robot name="six_arm">
<link name="base_link">
<visual>
<geometry>
<box size="0.20 .15 .003"/>
geometry>
visual>
link>
<link name="body">
<visual>
<geometry>
<box size="0.19 .11 .08"/>
geometry>
<material name="blue">
<color rgba="0 0 255 1"/>
material>
visual>
link>
<joint name="base_to_body" type="fixed">
<parent link="base_link"/>
<child link="body"/>
<origin xyz="0.0 0.0 0.04"/>
joint>
<link name="shoulder_stevo">
<visual>
<geometry>
<box size="0.054 .0403 .027"/>
geometry>
<material name="black">
<color rgba="1 1 0 1"/>
material>
visual>
link>
<joint name="body_to_left_shoulder_stevo" type="fixed">
<parent link="body"/>
<child link="shoulder_stevo"/>
<origin xyz="0.04 0.035 0.026"/>
joint>
<link name="shoulder_stevo_axis">
<visual>
<geometry>
<cylinder length=".04" radius="0.0029">cylinder>
geometry>
<material name="yellow">
<color rgba="1 1 0 1"/>
material>
visual>
link>
<joint name="shoulder_stevo_to_axis" type="fixed">
<axis xyz="0 0 1"/>
<parent link="shoulder_stevo"/>
<child link="shoulder_stevo_axis"/>
<origin rpy="1.57075 0 0" xyz="0.0 0.027 0.0"/>
<limit effort="100" velocity="100" lower="0" upper="3.1415926"/>
<joint_properties damping="0.0" friction="0.0"/>
joint>
<link name="shoulder_stevo_lift">
<visual>
<geometry>
<box size="0.054 .0403 .027"/>
geometry>
<material name="black">
<color rgba="1 1 0 1"/>
material>
visual>
link>
<joint name="shoulder_stevo_axis_to_lift_stevo" type="fixed">
<parent link="shoulder_stevo_axis"/>
<child link="shoulder_stevo_lift"/>
<origin xyz="0.0 -0.01015 -0.028"/>
joint>
<link name="shoulder_stevo_lift_axis">
<visual>
<geometry>
<cylinder length=".0704" radius="0.0029">cylinder>
geometry>
<material name="yellow">
<color rgba="1 1 0 1"/>
material>
visual>
link>
<joint name="shoulder_stevo_lift_to_axis" type="fixed">
<axis xyz="0 0 1"/>
<parent link="shoulder_stevo_lift"/>
<child link="shoulder_stevo_lift_axis"/>
<origin rpy="1.57075 0 0" xyz="0.0135 0.0 0.0"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
joint>
<link name="big_arm_up">
<visual>
<geometry>
<box size="0.145 .027 .002"/>
geometry>
<material name="sliver">
<color rgba="223 223 223 1"/>
material>
visual>
link>
<joint name="shoulder_stevo_lift_axis_to_left_big_arm" type="fixed">
<parent link="shoulder_stevo_lift_axis"/>
<child link="big_arm_up"/>
<origin xyz="0.059 0.0 -0.035"/>
joint>
<link name="big_arm_down">
<visual>
<geometry>
<box size="0.145 .027 .002"/>
geometry>
<material name="sliver">
<color rgba="223 223 223 1"/>
material>
visual>
link>
<joint name="big_arm_up_to_left_big_arm_down" type="fixed">
<parent link="big_arm_up"/>
<child link="big_arm_down"/>
<origin xyz="0.0 0.0 0.07"/>
joint>
<link name="arm_stevo_axis">
<visual>
<geometry>
<cylinder length=".0704" radius="0.0029">cylinder>
geometry>
<material name="yellow">
<color rgba="1 1 0 1"/>
material>
visual>
link>
<joint name="big_arm_up_to_axis" type="fixed">
<axis xyz="0 0 1"/>
<parent link="big_arm_up"/>
<child link="arm_stevo_axis"/>
<origin rpy="0 0 0.5" xyz="0.059 0.0 0.0352"/>
<limit effort="100" velocity="100" lower="0" upper="3.1415926"/>
<joint_properties damping="0.0" friction="0.0"/>
joint>
<link name="arm_stevo">
<visual>
<geometry>
<box size="0.054 .027 .0403"/>
geometry>
<material name="black">
<color rgba="1 1 0 1"/>
material>
visual>
link>
<joint name="big_arm_up_to_axis_to_arm_stevo" type="fixed">
<parent link="arm_stevo_axis"/>
<child link="arm_stevo"/>
<origin xyz="0.0135 0.0 0.0"/>
joint>
<link name="small_arm_up">
<visual>
<geometry>
<box size="0.0725 .027 .002"/>
geometry>
<material name="sliver">
<color rgba="223 223 223 1"/>
material>
visual>
link>
<joint name="arm_stevo_to_left_small_arm_up" type="fixed">
<parent link="arm_stevo"/>
<child link="small_arm_up"/>
<origin xyz="0.059 0.0 -0.035"/>
joint>
<link name="small_arm_down">
<visual>
<geometry>
<box size="0.0725 .027 .002"/>
geometry>
<material name="sliver">
<color rgba="223 223 223 1"/>
material>
visual>
link>
<joint name="small_arm_up_to_small_arm_down" type="fixed">
<parent link="small_arm_up"/>
<child link="small_arm_down"/>
<origin xyz="0.0 0.0 0.07"/>
joint>
<link name="small_arm_middle">
<visual>
<geometry>
<box size="0.07 .027 .002"/>
geometry>
<material name="sliver">
<color rgba="223 223 223 1"/>
material>
visual>
link>
<joint name="small_arm_up_to_small_arm_middle" type="fixed">
<parent link="small_arm_up"/>
<child link="small_arm_middle"/>
<origin rpy="0 1.57075 0" xyz="-0.035 0.0 0.035"/>
joint>
<link name="wrist_stevo_axis">
<visual>
<geometry>
<cylinder length=".0704" radius="0.0029">cylinder>
geometry>
<material name="yellow">
<color rgba="1 1 0 1"/>
material>
visual>
link>
<joint name="small_arm_up_to_axis" type="fixed">
<axis xyz="0 0 1"/>
<parent link="small_arm_up"/>
<child link="wrist_stevo_axis"/>
<origin rpy="0 0 0.5" xyz="0.0295 0.0 0.0352"/>
<limit effort="100" velocity="100" lower="0" upper="3.1415926"/>
<joint_properties damping="0.0" friction="0.0"/>
joint>
<link name="wrist_stevo">
<visual>
<geometry>
<box size="0.054 .027 .0403"/>
geometry>
<material name="black">
<color rgba="1 1 0 1"/>
material>
visual>
link>
<joint name="small_arm_up_to_axis_to_axis_stevo" type="fixed">
<parent link="wrist_stevo_axis"/>
<child link="wrist_stevo"/>
<origin xyz="0.0135 0.0 0.0"/>
joint>
<link name="wrist_run_stevo">
<visual>
<geometry>
<box size="0.054 .027 .0403"/>
geometry>
<material name="color1">
<color rgba="0 255 255 1 "/>
material>
visual>
link>
<joint name="wrist_stevo_to_wrist_run_stevo" type="fixed">
<parent link="wrist_stevo"/>
<child link="wrist_run_stevo"/>
<origin rpy="0 1.57075 0" xyz="0.0135 -0.027 0.0"/>
joint>
<link name="wrist_run_stevo_axis">
<visual>
<geometry>
<cylinder length=".04" radius="0.0029">cylinder>
geometry>
<material name="yellow">
<color rgba="1 1 0 1"/>
material>
visual>
link>
<joint name="wrist_run_stevo_to_axis" type="fixed">
<axis xyz="0 0 1"/>
<parent link="wrist_run_stevo"/>
<child link="wrist_run_stevo_axis"/>
<origin rpy="0 0 0" xyz="0.0135 0 0.020"/>
<limit effort="100" velocity="100" lower="0" upper="3.1415926"/>
<joint_properties damping="0.0" friction="0.0"/>
joint>
<link name="hand_run_stevo">
<visual>
<geometry>
<box size="0.054 .027 .0403"/>
geometry>
<material name="black">
<color rgba="0 0 0 1 "/>
material>
visual>
link>
<joint name="wrist_run_stevo_axis_to_hand_run_stevo" type="fixed">
<parent link="wrist_run_stevo_axis"/>
<child link="hand_run_stevo"/>
<origin rpy="1.57075 0 0" xyz="0.0 0.0 0.0335"/>
joint>
<link name="hand_run_stevo_axis">
<visual>
<geometry>
<cylinder length=".04" radius="0.0029">cylinder>
geometry>
<material name="yellow">
<color rgba="1 1 0 1"/>
material>
visual>
link>
<joint name="hand_run_stevo_to_hand_run_stevo_axis" type="fixed">
<axis xyz="0 0 1"/>
<parent link="hand_run_stevo"/>
<child link="hand_run_stevo_axis"/>
<origin rpy="0 0 0" xyz="0.0135 0 0.0135"/>
<limit effort="100" velocity="100" lower="0" upper="3.1415916"/>
<joint_properties damping="0.0" friction="0.0"/>
joint>
<link name="finger">
<visual>
<geometry>
<box size="0.0375 .0135 .002"/>
geometry>
<material name="sliver">
<color rgba="223 223 223 1"/>
material>
visual>
link>
<joint name="hand_run_stevo_axis_to_finger" type="fixed">
<parent link="hand_run_stevo_axis"/>
<child link="finger"/>
<origin rpy="0 0 1.57075" xyz="0.0 0.0173 0.02"/>
joint>
robot>4.创建display.launch文件
该文件可以帮助启动RViz来观察机械臂。其中有三个node,一个是rviz,另外两个joint_state_publisher robot_state_publisher是必须的node。
第一个输入参数 model 就是要启动的urdf文件路径。
第二个输入参数 gui 指定是否启用关节转动控制面板窗口。
<launch>
<arg name="model" />
<arg name="gui" default="False" />
<param name="robot_description" textfile="($find urdf_tutorial)/home/daniel/catkin_ws/src/six_arm/urdf/six_arm.urdf)" />
<param name="use_gui" value="$(arg gui)"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find urdf_tutorial)/urdf.rviz" required="true" />
launch> 5.切换到six_arm文件夹下,使用下面命令启动rviz来查看我们刚刚完成的机器人模型:
roslaunch urdf_tutorial display.launch model:=urdf/six_arm.urdf
切忌:urdf文件中最好不要有汉字注释~否则仿真有错