- ROS学习笔记之深度相机仿真、小结
要好好养胃
ROS学习笔记人工智能机器学习c++
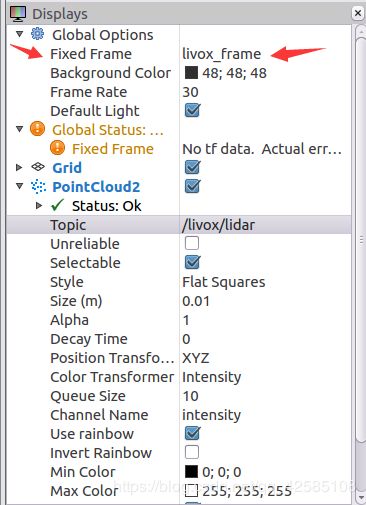
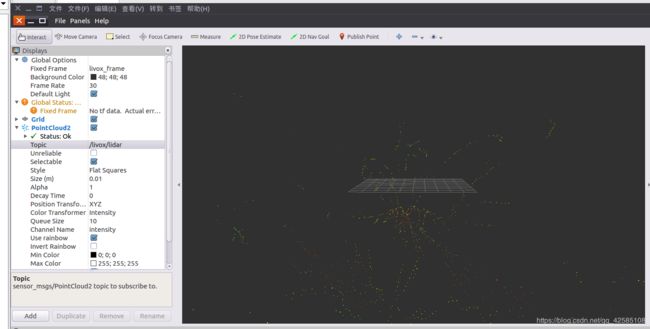
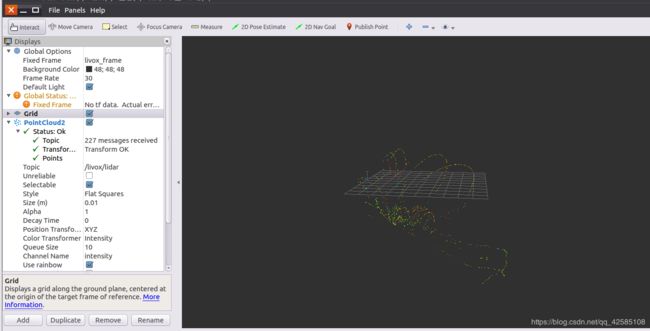
通过Gazebo模拟kinect摄像头,并在Rviz中显示kinect摄像头数据。实现流程:kinect摄像头仿真基本流程:已经创建完毕的机器人模型,编写一个单独的xacro文件,为机器人模型添加kinect摄像头配置;将此文件集成进xacro文件;启动Gazebo,使用Rviz显示kinect摄像头信息。1.Gazebo仿真Kinect1.1新建Xacro文件,配置kinetic传感器信息//这
- ROS学习笔记之摄像头仿真及显示
要好好养胃
ROS学习笔记人工智能机器学习c++
通过Gazebo模拟摄像头传感器,并在Rviz中显示摄像头数据。实现流程:摄像头仿真基本流程:已经创建完毕的机器人模型,编写一个单独的xacro文件,为机器人模型添加摄像头配置;将此文件集成进xacro文件;启动Gazebo,使用Rviz显示摄像头信息。1.Gazebo仿真摄像头1.1新建Xacro文件,配置摄像头传感器信息有几个要自行修改的地方,基本设置和laser有相同的部分,不做赘述。//实
- ROS学习笔记
xiyuping24
学习笔记机器人图论
下载使用鱼香ROS,一键下载十分好评~学习地址官网网站:ros.wiki调试打开终端,输入roscore,发现最后输出startcoreservice,说明安装成功尝试小海龟,打开另一个终端,输入rosrunturtlesimturtlesim_node,出现小海龟的窗口,说明成功其他小海龟玩法:小海龟画圆关于文件结构最高层是home中自己建的workspace,在里面应该有三大部分:buildd
- ROS学习笔记-roslaunch文件的编写&用sh脚本控制launch文件启动顺序
诗筱涵
ROS无人机-a-个人笔记
转载自:https://mp.weixin.qq.com/s?__biz=MzUyMTkxODQyOQ==&mid=2247484719&idx=1&sn=27b3a01c295ae256dc69d805fd5904ba&chksm=f9d2879dcea50e8b71b78d8b69750d282055173ea65494342e983088276859b7c4fe227f21f1&scene=
- ROS学习(5)可视化和调试工具一
敲代码的雪糕
ROSROS
文章目录前言一、调试ROS节点1、使用gdb调试器调试节点2、在节点启动时调用gdb调试器3、在节点启动时调用valgrind分析节点4、设置ROS节点core文件存储二、日志消息1.输出日志消息2.调试消息级别3.为特定节点配置调试消息级别4.消息命名5.按条件显示消息与过滤消息6.显示消息的方式7.使用rqt_console和rqt_logger_level在运行时修改调试级别总结前言ROS自
- 我的ROS学习笔记(四)
zenpluck
自动驾驶c++
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档publisher程序代码学习前言一、包含消息类型声明二、创建发布者对象三、创建并填充消息对象四、发布消息五、消息发布循环1.节点是否停止工作的检查2.控制消息发布频率总结前言发布者程序包含了很多之前不懂的知识,刚开始也许只能复制粘贴代码来运行实例,但最终目的还是为了自己能够编写这些代码。因此,弄明白哪部分代码是什么意思非常有必要,不
- 黄金票据 --- kerberos学习记录
B1ackMa9ic
学习网络网络攻击模型安全
文章目录Kerberos协议是怎么工作的一、黄金票据利用条件利用步骤Kerberos协议是怎么工作的这里首先要搞懂几个概念:认证服务器(AuthenticationServer,AS):负责首次身份验证和颁发TGT(TicketGrantingTicket)给用户。用户通过AS向Kerberos服务器发送身份验证请求,并在验证通过后获取TGT。授权票证颁发服务器(TicketGrantingSer
- 移动机器人激光SLAM导航(五):Cartographer SLAM 篇
Robot_Yue
自主探索导航学习SLAMCartographer工程化调参
参考Cartographer官方文档Cartographer从入门到精通1.Cartographer安装1.1前置条件推荐在刚装好的Ubuntu16.04或Ubuntu18.04上进行编译ROS安装:ROS学习1:ROS概述与环境搭建1.2依赖库安装资源下载完解压并执行以下指令https://pan.baidu.com/s/1LWqZ4SOKn2sZecQUDDXXEw?pwd=j6cf$sudo
- ROS学习笔记14:Action通信
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(14/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:action通
- ROS学习笔记15:动态参数
代码能跑就可以
学习笔记pythonc++
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(15/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:cfg文件,r
- ROS学习笔记13:导航相关消息
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(13/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:导航相关消息1
- ROS学习笔记12:机器人导航实现(理论)
代码能跑就可以
学习笔记机器人vscodepythonc++
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(12/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:SLAM,地图
- ROS学习笔记10:rosbag与rqt
代码能跑就可以
学习笔记pythonc++vscode
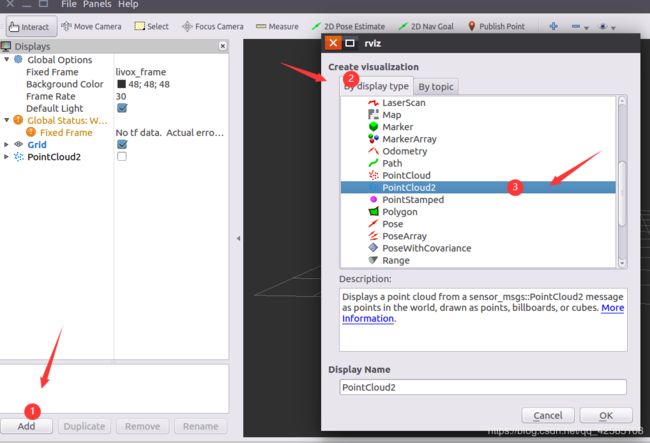
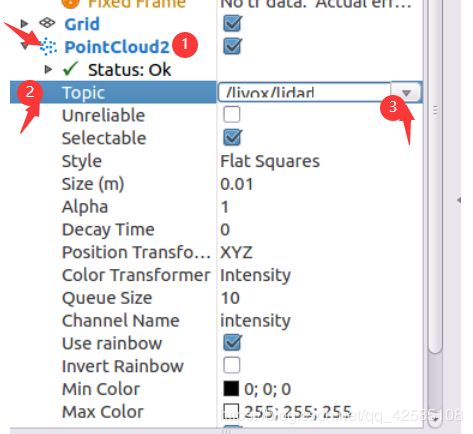
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(10/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:rosbag,
- ROS学习笔记8:TF坐标变换
代码能跑就可以
学习笔记vscodepythonc++
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(8/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:静态变换,动态变
- ROS学习笔记9:TF坐标变换实操
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(9/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:乌龟跟随要求产生
- ROS学习笔记4:通信机制实操
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(4/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:运动控制,位姿订
- ROS学习笔记6:launch文件
代码能跑就可以
学习笔记pythonc++服务器vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(6/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:launch文件
- ROS学习笔记2:话题通信
代码能跑就可以
学习笔记pythonc++
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(2/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:理论模型,发布,
- ROS学习笔记11——ROS中的重名问题
Simulink_
学习笔记机器人ROS
一、ros功能包重名——ros工作空间覆盖功能包重名时,会按照ROS_PACKAGE_PATH查找,在前的会优先执行。ROS会解析.bashrc文件,并生成ROS_PACKAGE_PATHROS包路径,即调用功能包的顺序,该变量中按照.bashrc中配置设置工作空间优先级,且ROS_PACKAGE_PATH中的值,和.bashrc的配置顺序相反(后配置的优先级更高)当然,功能包出现重名时,会出现安
- Linux-ROS学习之旅-话题编程(二)
Jesus-
ROSubuntu
##承接上一篇文章的知识,有下面的实例操作通过代码新生一个海龟,放置在(5,5)点,命名为turtle2,通过代码订阅turtle2的实时位置并打印在终端,控制turtle2实现旋转运动步骤:1.创建一个工作空间和一个功能包,功能包的依赖有rospyturtlesim在功能包里面的src文件创建.py文件用于编写代码,代码如下#!/usr/bin/envpython3#-*-coding:utf-
- Linux-ROS学习之旅(一)
Jesus-
ROS学习机器人自动驾驶
##本人使用的是双系统,noetic版本,学习ROS初衷是学习控制机械臂,具体下载方法见B站,观看的教程是古月居早年的教学视频,和ROS_wiki:ROS/Tutorials-ROSWiki##下一篇文章有具体的实例,但是所用方法与本篇不尽相同1.创建工作空间$mkdir-p~//src$cd~//src$catkin_init_workspace$cd~//$catkin_make$source
- ROS学习笔记(一)——ROS Melodic的安装
橙学长学路规
ROS学习笔记学习
目录文章目录声明前言安装步骤(1)添加镜像源(2)添加密钥(3)更新软件信息(4)安装(5)初始化rosdep(注意,这里十有八九会出错!!!)第一条指令第二条指令(6)设置环境变量:(7)安装rosinstall总结参考文章授权说明声明本文为小陈同学原创,本人是刚刚开始学习ROS的小白,在安装过程中遇到了很多坑,特此总结整个安装过程与踩过的坑,希望能够对您有所帮助,转载请阅读文末的“授权说明”,
- ROS学习笔记(一) ubuntu和ros的安装
万物皆可der
ubuntulinux
##声明:这里只为大家提供一个思路,细节操作请大家可以百度或者在csdn上搜索关键字,然后寻找具体操作Ubuntu安装安装Ubuntu我弄了一周时间,所以不断踩坑不断试坑,总结出一下经验,供大家参考。1.Ubuntu安装有两种方式。第一种是利用虚拟机安装Ubuntu(这种方法比较简单如果专业做机器人方面的话,建议用第二种)。①过程文字描述:进入Windows虚拟机|WorkstationPro|V
- ROS学习笔记(一)—— 基础概览
zxxRobot
Ros
1.ros简介1.1catkin工作空间与编译系统文件列表查看工具treeshellsudoaptinstalltreetree#显示当前文件夹树状图treetree-L1#显示一级目录工作空间:存放工程开发相关文件的文件夹。源文件空间:src文件夹,放置功能包。编译空间:build文件夹,c++编译过程中产生的中间文件。基本不用关心。开发空间:devel文件夹,保存编译后生成的可执行文件。安装空
- ROS学习笔记8——实现ROS通信时的常用命令
Simulink_
学习笔记机器人linux人工智能
机器人系统中启动的节点少则几个,多则十几个、几十个,不同的节点名称各异,通信时使用话题、服务、消息、参数等等都各不相同,一个显而易见的问题是:当需要自定义节点和其他某个已经存在的节点通信时,如何获取对方的话题、以及消息载体的格式呢?ROS提供了一些实用的命令行工具,可以用于获取不同节点的各类信息。这边总结介绍了一些常用命令:rosnode:操作节点rostopic:操作话题rosservice:操
- ROS学习笔记6——ROS通信机制2(服务通信)
Simulink_
学习笔记机器人linux人工智能
服务通信也是ROS中一种极其常用的通信模式,服务通信是基于请求响应模式的,是一种应答机制。也即:一个节点A向另一个节点B发送请求,B接收处理请求并产生响应结果返回给A。用于偶然的、对时时性有要求、有一定逻辑处理需求的数据传输场景。一、服务通信理论模型图二、角色服务通信较之于话题通信更简单些,理论模型如上图所示,该模型中涉及到三个角色:ROSmaster(管理者)Server(服务端)Client(
- ROS学习笔记1——用ros输出helloworld
Simulink_
学习笔记机器人
一、创建ROS工作空间mkdir-pxxx_ws/src(必须得有src)cdxxx_wscatkin_make二、启动vscode进入工作空间,启动vscodecode.三、快捷键编译ros快捷键ctrl+shift+B调用编译,点击catkin_make:build后面的小齿轮修改.vscode/tasks.json文件{"version":"2.0.0","tasks":[{"label":
- ROS学习笔记4——ROS通信机制(话题通信)
Simulink_
学习笔记机器人人工智能
话题通信是ROS中使用频率最高的一种通信模式,话题通信是基于发布订阅模式的,也即:一个节点发布消息,另一个节点订阅该消息。一般用于不断更新的、少逻辑处理的数据传输场景。以相机信息的采集处理为例,在ROS中有一个节点需要时时的发布当前相机采集到的数据,另一个节点会订阅并解析相机数据。一、话题通信理论模型图二、角色话题通信实现模型是比较复杂的,该模型如下图所示,该模型中涉及到三个角色::ROSMast
- ROS学习笔记5——话题通信自定义msg
Simulink_
学习笔记机器人人工智能linux
在ROS通信协议中,数据载体是一个较为重要组成部分,ROS中通过std_msgs封装了一些原生的数据类型,比如:String、Int32、Int64、Char、Bool、Empty....但是,这些数据一般只包含一个data字段,结构的单一意味着功能上的局限性,当传输一些复杂的数据,比如:相机的信息...std_msgs由于描述性较差而显得力不从心,这种场景下可以使用自定义的消息类型。ROS中还有
- ROS学习笔记10——自定义源文件调用
Simulink_
学习笔记机器人ROS
调用自定义源文件的时候需要配置cmakelists文件,刚学感觉还挺繁琐,用一个小案例记录一下。1、随便写个头文件在功能包的include/功能包名目录下创建一个头文件记得在.vscode下c_cpp_properties.json的includepath属性中把路径加进去#ifndef_HELLO_H#define_HELLO_Hnamespacehello_ns{classMyHello{pu
- java类加载顺序
3213213333332132
java
package com.demo;
/**
* @Description 类加载顺序
* @author FuJianyong
* 2015-2-6上午11:21:37
*/
public class ClassLoaderSequence {
String s1 = "成员属性";
static String s2 = "
- Hibernate与mybitas的比较
BlueSkator
sqlHibernate框架ibatisorm
第一章 Hibernate与MyBatis
Hibernate 是当前最流行的O/R mapping框架,它出身于sf.net,现在已经成为Jboss的一部分。 Mybatis 是另外一种优秀的O/R mapping框架。目前属于apache的一个子项目。
MyBatis 参考资料官网:http:
- php多维数组排序以及实际工作中的应用
dcj3sjt126com
PHPusortuasort
自定义排序函数返回false或负数意味着第一个参数应该排在第二个参数的前面, 正数或true反之, 0相等usort不保存键名uasort 键名会保存下来uksort 排序是对键名进行的
<!doctype html>
<html lang="en">
<head>
<meta charset="utf-8&q
- DOM改变字体大小
周华华
前端
<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd">
<html xmlns="http://www.w3.org/1999/xhtml&q
- c3p0的配置
g21121
c3p0
c3p0是一个开源的JDBC连接池,它实现了数据源和JNDI绑定,支持JDBC3规范和JDBC2的标准扩展。c3p0的下载地址是:http://sourceforge.net/projects/c3p0/这里可以下载到c3p0最新版本。
以在spring中配置dataSource为例:
<!-- spring加载资源文件 -->
<bean name="prope
- Java获取工程路径的几种方法
510888780
java
第一种:
File f = new File(this.getClass().getResource("/").getPath());
System.out.println(f);
结果:
C:\Documents%20and%20Settings\Administrator\workspace\projectName\bin
获取当前类的所在工程路径;
如果不加“
- 在类Unix系统下实现SSH免密码登录服务器
Harry642
免密ssh
1.客户机
(1)执行ssh-keygen -t rsa -C "
[email protected]"生成公钥,xxx为自定义大email地址
(2)执行scp ~/.ssh/id_rsa.pub root@xxxxxxxxx:/tmp将公钥拷贝到服务器上,xxx为服务器地址
(3)执行cat
- Java新手入门的30个基本概念一
aijuans
javajava 入门新手
在我们学习Java的过程中,掌握其中的基本概念对我们的学习无论是J2SE,J2EE,J2ME都是很重要的,J2SE是Java的基础,所以有必要对其中的基本概念做以归纳,以便大家在以后的学习过程中更好的理解java的精髓,在此我总结了30条基本的概念。 Java概述: 目前Java主要应用于中间件的开发(middleware)---处理客户机于服务器之间的通信技术,早期的实践证明,Java不适合
- Memcached for windows 简单介绍
antlove
javaWebwindowscachememcached
1. 安装memcached server
a. 下载memcached-1.2.6-win32-bin.zip
b. 解压缩,dos 窗口切换到 memcached.exe所在目录,运行memcached.exe -d install
c.启动memcached Server,直接在dos窗口键入 net start "memcached Server&quo
- 数据库对象的视图和索引
百合不是茶
索引oeacle数据库视图
视图
视图是从一个表或视图导出的表,也可以是从多个表或视图导出的表。视图是一个虚表,数据库不对视图所对应的数据进行实际存储,只存储视图的定义,对视图的数据进行操作时,只能将字段定义为视图,不能将具体的数据定义为视图
为什么oracle需要视图;
&
- Mockito(一) --入门篇
bijian1013
持续集成mockito单元测试
Mockito是一个针对Java的mocking框架,它与EasyMock和jMock很相似,但是通过在执行后校验什么已经被调用,它消除了对期望 行为(expectations)的需要。其它的mocking库需要你在执行前记录期望行为(expectations),而这导致了丑陋的初始化代码。
&nb
- 精通Oracle10编程SQL(5)SQL函数
bijian1013
oracle数据库plsql
/*
* SQL函数
*/
--数字函数
--ABS(n):返回数字n的绝对值
declare
v_abs number(6,2);
begin
v_abs:=abs(&no);
dbms_output.put_line('绝对值:'||v_abs);
end;
--ACOS(n):返回数字n的反余弦值,输入值的范围是-1~1,输出值的单位为弧度
- 【Log4j一】Log4j总体介绍
bit1129
log4j
Log4j组件:Logger、Appender、Layout
Log4j核心包含三个组件:logger、appender和layout。这三个组件协作提供日志功能:
日志的输出目标
日志的输出格式
日志的输出级别(是否抑制日志的输出)
logger继承特性
A logger is said to be an ancestor of anothe
- Java IO笔记
白糖_
java
public static void main(String[] args) throws IOException {
//输入流
InputStream in = Test.class.getResourceAsStream("/test");
InputStreamReader isr = new InputStreamReader(in);
Bu
- Docker 监控
ronin47
docker监控
目前项目内部署了docker,于是涉及到关于监控的事情,参考一些经典实例以及一些自己的想法,总结一下思路。 1、关于监控的内容 监控宿主机本身
监控宿主机本身还是比较简单的,同其他服务器监控类似,对cpu、network、io、disk等做通用的检查,这里不再细说。
额外的,因为是docker的
- java-顺时针打印图形
bylijinnan
java
一个画图程序 要求打印出:
1.int i=5;
2.1 2 3 4 5
3.16 17 18 19 6
4.15 24 25 20 7
5.14 23 22 21 8
6.13 12 11 10 9
7.
8.int i=6
9.1 2 3 4 5 6
10.20 21 22 23 24 7
11.19
- 关于iReport汉化版强制使用英文的配置方法
Kai_Ge
iReport汉化英文版
对于那些具有强迫症的工程师来说,软件汉化固然好用,但是汉化不完整却极为头疼,本方法针对iReport汉化不完整的情况,强制使用英文版,方法如下:
在 iReport 安装路径下的 etc/ireport.conf 里增加红色部分启动参数,即可变为英文版。
# ${HOME} will be replaced by user home directory accordin
- [并行计算]论宇宙的可计算性
comsci
并行计算
现在我们知道,一个涡旋系统具有并行计算能力.按照自然运动理论,这个系统也同时具有存储能力,同时具备计算和存储能力的系统,在某种条件下一般都会产生意识......
那么,这种概念让我们推论出一个结论
&nb
- 用OpenGL实现无限循环的coverflow
dai_lm
androidcoverflow
网上找了很久,都是用Gallery实现的,效果不是很满意,结果发现这个用OpenGL实现的,稍微修改了一下源码,实现了无限循环功能
源码地址:
https://github.com/jackfengji/glcoverflow
public class CoverFlowOpenGL extends GLSurfaceView implements
GLSurfaceV
- JAVA数据计算的几个解决方案1
datamachine
javaHibernate计算
老大丢过来的软件跑了10天,摸到点门道,正好跟以前攒的私房有关联,整理存档。
-----------------------------华丽的分割线-------------------------------------
数据计算层是指介于数据存储和应用程序之间,负责计算数据存储层的数据,并将计算结果返回应用程序的层次。J
&nbs
- 简单的用户授权系统,利用给user表添加一个字段标识管理员的方式
dcj3sjt126com
yii
怎么创建一个简单的(非 RBAC)用户授权系统
通过查看论坛,我发现这是一个常见的问题,所以我决定写这篇文章。
本文只包括授权系统.假设你已经知道怎么创建身份验证系统(登录)。 数据库
首先在 user 表创建一个新的字段(integer 类型),字段名 'accessLevel',它定义了用户的访问权限 扩展 CWebUser 类
在配置文件(一般为 protecte
- 未选之路
dcj3sjt126com
诗
作者:罗伯特*费罗斯特
黄色的树林里分出两条路,
可惜我不能同时去涉足,
我在那路口久久伫立,
我向着一条路极目望去,
直到它消失在丛林深处.
但我却选了另外一条路,
它荒草萋萋,十分幽寂;
显得更诱人,更美丽,
虽然在这两条小路上,
都很少留下旅人的足迹.
那天清晨落叶满地,
两条路都未见脚印痕迹.
呵,留下一条路等改日再
- Java处理15位身份证变18位
蕃薯耀
18位身份证变15位15位身份证变18位身份证转换
15位身份证变18位,18位身份证变15位
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
蕃薯耀 201
- SpringMVC4零配置--应用上下文配置【AppConfig】
hanqunfeng
springmvc4
从spring3.0开始,Spring将JavaConfig整合到核心模块,普通的POJO只需要标注@Configuration注解,就可以成为spring配置类,并通过在方法上标注@Bean注解的方式注入bean。
Xml配置和Java类配置对比如下:
applicationContext-AppConfig.xml
<!-- 激活自动代理功能 参看:
- Android中webview跟JAVASCRIPT中的交互
jackyrong
JavaScripthtmlandroid脚本
在android的应用程序中,可以直接调用webview中的javascript代码,而webview中的javascript代码,也可以去调用ANDROID应用程序(也就是JAVA部分的代码).下面举例说明之:
1 JAVASCRIPT脚本调用android程序
要在webview中,调用addJavascriptInterface(OBJ,int
- 8个最佳Web开发资源推荐
lampcy
编程Web程序员
Web开发对程序员来说是一项较为复杂的工作,程序员需要快速地满足用户需求。如今很多的在线资源可以给程序员提供帮助,比如指导手册、在线课程和一些参考资料,而且这些资源基本都是免费和适合初学者的。无论你是需要选择一门新的编程语言,或是了解最新的标准,还是需要从其他地方找到一些灵感,我们这里为你整理了一些很好的Web开发资源,帮助你更成功地进行Web开发。
这里列出10个最佳Web开发资源,它们都是受
- 架构师之面试------jdk的hashMap实现
nannan408
HashMap
1.前言。
如题。
2.详述。
(1)hashMap算法就是数组链表。数组存放的元素是键值对。jdk通过移位算法(其实也就是简单的加乘算法),如下代码来生成数组下标(生成后indexFor一下就成下标了)。
static int hash(int h)
{
h ^= (h >>> 20) ^ (h >>>
- html禁止清除input文本输入缓存
Rainbow702
html缓存input输入框change
多数浏览器默认会缓存input的值,只有使用ctl+F5强制刷新的才可以清除缓存记录。
如果不想让浏览器缓存input的值,有2种方法:
方法一: 在不想使用缓存的input中添加 autocomplete="off";
<input type="text" autocomplete="off" n
- POJO和JavaBean的区别和联系
tjmljw
POJOjava beans
POJO 和JavaBean是我们常见的两个关键字,一般容易混淆,POJO全称是Plain Ordinary Java Object / Pure Old Java Object,中文可以翻译成:普通Java类,具有一部分getter/setter方法的那种类就可以称作POJO,但是JavaBean则比 POJO复杂很多, Java Bean 是可复用的组件,对 Java Bean 并没有严格的规
- java中单例的五种写法
liuxiaoling
java单例
/**
* 单例模式的五种写法:
* 1、懒汉
* 2、恶汉
* 3、静态内部类
* 4、枚举
* 5、双重校验锁
*/
/**
* 五、 双重校验锁,在当前的内存模型中无效
*/
class LockSingleton
{
private volatile static LockSingleton singleton;
pri