Fisher的判别推导
一、Fisher算法的主要思想
线性判别分析(Linear Discriminant Analysis,简称LDA)是一种经典的线性学习方法,在二分类问题上因为最早由【Fisher,1936年】提出,所以也称为“Fisher 判别分析!”
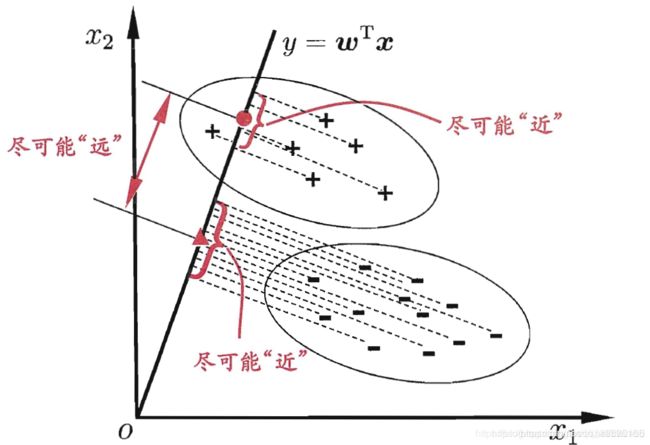
Fisher(费歇)判别思想是投影,使多维问题简化为一维问题来处理。选择一个适当的投影轴,使所有的样本点都投影到这个轴上得到一个投影值。对这个投影轴的方向的要求是:使每一类内的投影值所形成的类内离差尽可能小,而不同类间的投影值所形成的类间离差尽可能大。
二、Fisher数学算法步骤
为了找到最佳投影方向,需要计算出 各类样本均值、样本类内离散度矩阵 Si\boldsymbol S_{i}S i和样本总类内离散度矩阵 Sw\boldsymbolS_{w}Sw、样本类间离散度矩阵 Sb\boldsymbol S_{b}Sb ,根据Fisher准则,找到最佳投影向量,将训练集内的所有样本进行投影,投影到一维Y空间,由于Y空间是一维的,则需要求出Y空间的划分边界点,找到边界点后,就可以对待测样本进行一维Y空间投影,判断它的投影点与分界点的关系,将其归类。具体方法如下(以两类问题为例子):
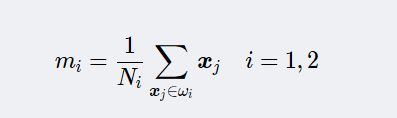
①计算各类样本均值向量MI,Mi是各个类的均值,Ni是Wi 类的样本个数。
②计算样本类内离散度矩阵Si和总类内离散度矩阵Sw。

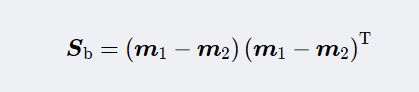
③计算样本类间离散度矩阵Sb。
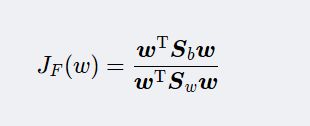
④求投影方向向量 WWW (维度和样本的维度相同)。我们希望投影后,在一维YYY空间里各类样本尽可能分开,就是我们希望的两类样本均值之差(m1¯¯¯¯¯−m2¯¯¯¯¯)越大越好,同时希望各类样本内部尽量密集,即是:希望类内离散度越小越好。因此,我们可以定义Fisher准则函数为:
⑤将训练集内所有样本进行投影。
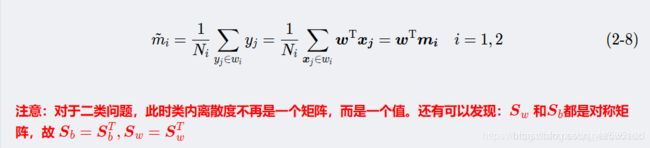
⑥. 计算在投影空间上的分割阈值y0,在一维Y空间,各类样本均值mi¯为:
样本类内离散度Si¯2和总类内离散度 Sw¯
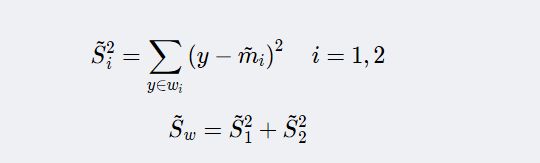
而此时类间离散度就成为两类均值差的平方。
计算阈值y0
⑦对于给定的测试样本x,计算出它在w上的投影点y
⑧根据决策规则分类!
三、python代码实现
1.数据生成
from sklearn.datasets import make_multilabel_classification
import numpy as np
x, y = make_multilabel_classification(n_samples=20, n_features=2,
n_labels=1, n_classes=1,
random_state=2) # 设置随机数种子,保证每次产生相同的数据。
# 根据类别分个类
index1 = np.array([index for (index, value) in enumerate(y) if value == 0]) # 获取类别1的indexs
index2 = np.array([index for (index, value) in enumerate(y) if value == 1]) # 获取类别2的indexs
c_1 = x[index1] # 类别1的所有数据(x1, x2) in X_1
c_2 = x[index2] # 类别2的所有数据(x1, x2) in X_2
2、fisher算法实现
def cal_cov_and_avg(samples):
"""
给定一个类别的数据,计算协方差矩阵和平均向量
:param samples:
:return:
"""
u1 = np.mean(samples, axis=0)
cov_m = np.zeros((samples.shape[1], samples.shape[1]))
for s in samples:
t = s - u1
cov_m += t*t.reshape(2, 1)
return cov_m, u1
def fisher(c_1, c_2):
"""
fisher算法实现(参考上面的推导公式进行理解)
:param c_1:
:param c_2:
:return:
"""
cov_1, u1 = cal_cov_and_avg(c_1)
cov_2, u2 = cal_cov_and_avg(c_2)
s_w = cov_1 + cov_2 # 总类内离散度矩阵。
u, s, v = np.linalg.svd(s_w) # 下面的参考公式(4-10)
s_w_inv = np.dot(np.dot(v.T, np.linalg.inv(np.diag(s))), u.T)
return np.dot(s_w_inv, u1 - u2)
3、判断类别
def judge(sample, w, c_1, c_2):
"""
返回值:ture 属于1;false 属于2
:param sample:
:param w:
:param c_1:
:param c_2:
:return:
"""
u1 = np.mean(c_1, axis=0)
u2 = np.mean(c_2, axis=0)
center_1 = np.dot(w.T, u1) # 参考公式(2-8)
center_2 = np.dot(w.T, u2)
pos = np.dot(w.T, sample) # 新样本进来判断
return abs(pos - center_1) < abs(pos - center_2)
w = fisher(c_1, c_2) # 调用函数,得到参数w
out = judge(c_2[1], w, c_1, c_2) # 判断所属的类别。
print(out)
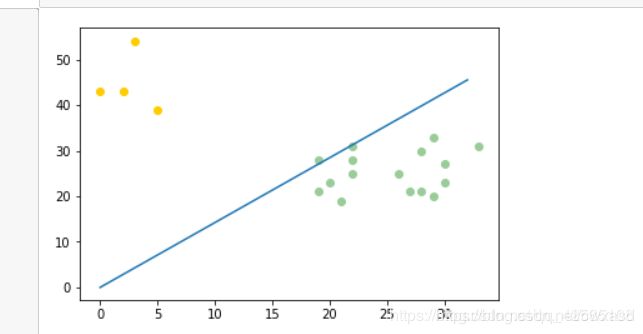
4.绘图
plt.scatter(c_1[:, 0], c_1[:, 1], c='red')
plt.scatter(c_2[:, 0], c_2[:, 1], c='blue')
line_x = np.arange(min(np.min(c_1[:, 0]), np.min(c_2[:, 0])),
max(np.max(c_1[:, 0]), np.max(c_2[:, 0])),
step=1)
line_y = -(w[0]*line_x) / w[1]
plt.plot(line_x, line_y, linewidth=3.0, label = 'fisher boundary line ')
plt.legend(loc='upper right')
plt.xlabel('feature 1')
plt.ylabel('feature 2')
plt.show()
5.运行结果: