ArduPilot+mavros+gazebo+QGC联合仿真初体验
首先给出最终效果图:
实现内容与PX4官网代码功能类似,四旋翼飞机自动起飞至2.5m高度,悬停一定时间,然后自主降落。
记录如下几个需要注意的地方:
- 一共使用到三个文件夹,其中第一个为源代码,第二个为参照官网下载的gazebo地图信息,第三个为ROS功能包。

2.第二个gazebo地图需要在github上下载然后编译
git clone https://github.com/khancyr/ardupilot_gazebo
cd ardupilot_gazebo
mkdir build
cd build
cmake ..
make -j4
sudo make install
然后,注意要把环境变量配置好,参照github上的说法如下
echo 'source /usr/share/gazebo/setup.sh' >> ~/.bashrc
Set Path of Gazebo Models (Adapt the path to where to clone the repo)
echo 'export GAZEBO_MODEL_PATH=~/ardupilot_gazebo/models' >> ~/.bashrc
Set Path of Gazebo Worlds (Adapt the path to where to clone the repo)
echo 'export GAZEBO_RESOURCE_PATH=~/ardupilot_gazebo/worlds:${GAZEBO_RESOURCE_PATH}' >> ~/.bashrc
source ~/.bashrc
配置好的环境变量截图如下

3. 启动gazebo 地图为
gazebo --verbose worlds/iris_arducopter_runway.world
注:1)在启动过程中,存在一直download的情况,需要下载gazebo的地图包(从百度云盘直接下载即可),然后解压到~/.gazebo下(若没有worlds文件夹,则创建文件夹)如下图所示
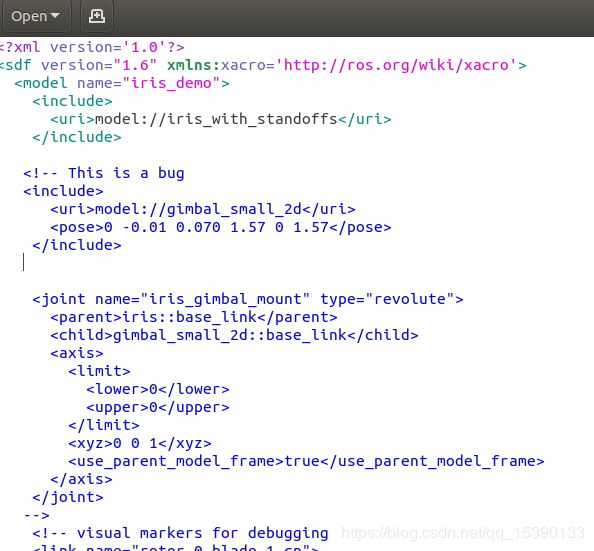
 2)启动gazebo地图的时候,发现 四轴云台链接件 需要下载,故在模型中直接选择屏蔽,即最终的仿真中该部件缺失。方法为找到下图中的
2)启动gazebo地图的时候,发现 四轴云台链接件 需要下载,故在模型中直接选择屏蔽,即最终的仿真中该部件缺失。方法为找到下图中的model.sdf文件。
将其中的云台相关部分屏蔽掉
此时,即可正常启动gazebo环境,如下图所示。

4. 按照官网方式,打开ArduPilot代码中的sitl模式,命令为(可以理解为ArduPilot中的sitl模式调用的为Tools/autotest/sim_vehicle.py文件)
cd ~/ardupilot/ArduCopter
../Tools/autotest/sim_vehicle.py -f gazebo-iris --console --map
后面的参数–console为打开显示端,–map为打开地图。如下图所示。
此时,已经完成了ArduPilot的sitl模式与gezebo联合调试。(左下角的报错为地图未成功加载完毕,会不停的从网络上下载相应的地图)。
5. 此时,打开QGC会自动的链接上ArduPilot,即可完成直接的通信。同时可以在QGC上实现相应的动作。

6. 最后是ROS和mavros部分。功能包的创建和编译首先参照官网。和前面写的博客推文一致,增加了offboard模式的结点。(这里,对应ArduPilot代码,没有对应的offboard模式,我采用GUIDED模式进行,但是guide模式并非offboard模式)。按照官网说明,拷贝从mavros代码包中拷贝apm.launch到自己建的ROS功能包中
Let’s copy MAVROS default launchfile for ArduPilot :
roscp mavros apm.launch apm.launch
然后编辑apm.launch文件,修改对应的端口
<arg name="fcu_url" default="udp://127.0.0.1:14551@14555" />
在本次实验中,从下句输出信息可以看出,共打开了127.0.0.1:14550,14551端口。其中一个分配给QGC,另一个分配给mavros即可。
"--master" "tcp:127.0.0.1:5760" "--sitl" "127.0.0.1:5501"
"--out" "127.0.0.1:14550" "--out" "127.0.0.1:14551" "--map" "--console"
- 最后,通过ROSlaunch启动对应的ros结点,完成四旋翼的起飞,悬停和降落功能。运行指令为:
roslaunch apm_mavros apm.launch
其中ROS的代码部分,主要是为了实现功能,粘贴主要部分如下:
if(!current_state.armed && tmp)
{
arming_client.call(arm_cmd);
tmp = 1;
ROS_INFO("Call for arm!");
}
if(arm_cmd.response.success)
{
take_off.request.altitude = 2.5;
if(!take_off.response.success && tmp)
{
tmp = 0;
set_takeoff_client.call(take_off);
ROS_INFO("Call for takeoff");
// sleep(10);
}
if(take_off.response.success)
{
// ROS_INFO("Takeoff successfully!");
count++;
}
}
if(count>300)
{
mode_rtl_ok = 1;
offb_set_mode.request.custom_mode = "RTL";
set_mode_client.call(offb_set_mode);
}
总结:至此,ROS/Mavros + gazebo 与PX4 (PX4推文点击这里查看)和ArduPilot的 sitl 仿真均已经验证实现过了。个人感觉,PX4代码对这一套仿真流程支持要好一些,主要好在提供的代码全,讲解全,附带的诸如lidar, camera的插件多。而ArduPilot则没有将重心放在这里,需要各位程序员自己变成实现,这就要求对gazebo插件,mavros等内容有较好的理解。另外,ArduPilot的官网信息也有很多需要维护和修改,存在一定的坑(此处对大神无效)。
当然,这一套仿真流程主要是用在swarm, SLAM等上面,PX4的代码维护者很多也都是机器视觉方面的。ArduPilot的代码维护和变动感觉要大一些,后面会推出UAVCAN,还有Lua脚本等高端玩法,加入了无人船,Rover等。
向两个活跃社区的贡献者致敬!