ROS学习——移动机器人导航仿真(一)
——————————————————————————————————————————————————
一、模型的建立、rviz显示与gazebo仿真
1、工作空间的建立
建立一个工作空间,并在src目录下创建功能包如slam_sim_demo,在功能包下创建urdf与laucn文件夹。
2、xacro文件的编写
(1)、robot_model.xacro——四轮小车
在urdf文件下编写robot_model.xacro
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro"
xmlns:sensor="http://playerstage.sourceforge.net/gazebo/xmlschema/#sensor"
xmlns:controller="http://playerstage.sourceforge.net/gazebo/xmlschema/#controller"
xmlns:interface="http://playerstage.sourceforge.net/gazebo/xmlschema/#interface"
name="robot1_xacro">
<xacro:property name="length_wheel" value="0.05" />
<xacro:property name="radius_wheel" value="0.05" />
<xacro:macro name="default_inertial" params="mass"> //质量与惯性的宏定义
<inertial>
<mass value="${mass}" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0" //inertiam没有少l
iyy="1.0" iyz="0.0"
izz="1.0" />
</inertial>
</xacro:macro>
<link name="base_footprint">
<visual>
<geometry>
<box size="0.001 0.001 0.001"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
</visual>
<xacro:default_inertial mass="0.0001"/>
</link>
<gazebo reference="base_footprint">
<material>Gazebo/Green</material>
<turnGravityOff>false</turnGravityOff>
</gazebo>
<joint name="base_footprint_joint" type="fixed">
<origin xyz="0 0 0" />
<parent link="base_footprint" />
<child link="base_link" />
</joint>
<link name="base_link">
<visual>
<geometry>
<box size="0.2 .3 .1"/>
</geometry>
<origin rpy="0 0 1.54" xyz="0 0 0.05"/>
<material name="Blue">
<color rgba="0.0 0.0 0.8 1.0"/>
</material>
</visual>
<collision>
<geometry>
<box size="0.2 .3 0.1"/>
</geometry>
</collision>
<xacro:default_inertial mass="25"/> //输入的为质量 可以根据仿真情况自行调节
</link>
<gazebo reference="base_link">
<material>Gazebo/Blue</material>
<turnGravityOff>false</turnGravityOff>
</gazebo>
<link name="wheel_1">
<visual>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
</geometry>
<!-- <origin rpy="0 1.5 0" xyz="0.1 0.1 0"/> -->
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
<collision>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
</geometry>
</collision>
<xacro:default_inertial mass="1"/>
</link>
<gazebo reference="wheel_1">
<material>Gazebo/Black</material>
<turnGravityOff>false</turnGravityOff>
</gazebo>
<link name="wheel_2">
<visual>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
</geometry>
<!-- <origin rpy="0 1.5 0" xyz="-0.1 0.1 0"/> -->
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black"/>
</visual>
<collision>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
</geometry>
</collision>
<xacro:default_inertial mass="1"/>
</link>
<gazebo reference="wheel_2">
<material>Gazebo/Black</material>
<turnGravityOff>false</turnGravityOff>
</gazebo>
<link name="wheel_3">
<visual>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
</geometry>
<!-- <origin rpy="0 1.5 0" xyz="0.1 -0.1 0"/> -->
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black"/>
</visual>
<collision>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
</geometry>
</collision>
<xacro:default_inertial mass="1"/>
</link>
<gazebo reference="wheel_3">
<material>Gazebo/Black</material>
<turnGravityOff>false</turnGravityOff>
</gazebo>
<link name="wheel_4">
<visual>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
</geometry>
<!-- <origin rpy="0 1.5 0" xyz="-0.1 -0.1 0"/> -->
<origin rpy="0 0 0" xyz="0 0 0" />
<material name="black"/>
</visual>
<collision>
<geometry>
<cylinder length="${length_wheel}" radius="${radius_wheel}"/>
</geometry>
</collision>
<xacro:default_inertial mass="1"/>
</link>
<gazebo reference="wheel_4">
<material>Gazebo/Black</material>
<turnGravityOff>false</turnGravityOff>
</gazebo>
<joint name="base_to_wheel1" type="continuous">
<parent link="base_link"/>
<child link="wheel_1"/>
<origin rpy="-1.5707 0 0" xyz="0.1 0.15 0"/>
<axis xyz="0 0 1" />
</joint>
<joint name="base_to_wheel2" type="continuous">
<axis xyz="0 0 1" />
<anchor xyz="0 0 0" />
<limit effort="100" velocity="100" />
<parent link="base_link"/>
<child link="wheel_2"/>
<origin rpy="-1.5707 0 0" xyz="-0.1 0.15 0"/>
</joint>
<joint name="base_to_wheel3" type="continuous">
<parent link="base_link"/>
<axis xyz="0 0 1" />
<child link="wheel_3"/>
<origin rpy="-1.5707 0 0" xyz="0.1 -0.15 0"/>
</joint>
<joint name="base_to_wheel4" type="continuous">
<parent link="base_link"/>
<axis xyz="0 0 1" />
<child link="wheel_4"/>
<origin rpy="-1.5707 0 0" xyz="-0.1 -0.15 0"/>
</joint>
//轮子在gazebo中的属性配置,里程计数据的由来
<gazebo>
<plugin name="skid_steer_drive_controller" filename="libgazebo_ros_skid_steer_drive.so">
<updateRate>100.0</updateRate>
<robotNamespace>/</robotNamespace>
<leftFrontJoint>base_to_wheel1</leftFrontJoint>
<rightFrontJoint>base_to_wheel3</rightFrontJoint>
<leftRearJoint>base_to_wheel2</leftRearJoint>
<rightRearJoint>base_to_wheel4</rightRearJoint>
<wheelSeparation>0.2</wheelSeparation>
<wheelDiameter>0.1</wheelDiameter>
<torque>2</torque> //扭矩
<odometryTopic>odom</odometryTopic>
<odometryFrame>odom</odometryFrame>
<robotBaseFrame>base_footprint</robotBaseFrame>
<topicName>cmd_vel</topicName>
<broadcastTF>1</broadcastTF> //开启tf转换
</plugin>
</gazebo>
</robot>
(2)、lidar_model.xacro——激光雷达
在urdf文件下编写lidar_model.xacro
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="laser">
<xacro:macro name="rplidar" params="prefix:=laser">
<!-- Create laser reference frame -->
<link name="${prefix}_link">
<inertial>
<mass value="0.1" />
<origin xyz="0 0 0" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0"
iyy="0.01" iyz="0.0"
izz="0.01" />
</inertial>
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
<geometry>
<cylinder length="0.06" radius="0.05"/>
</geometry>
</collision>
</link>
<gazebo reference="${prefix}_link">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="${prefix}_link">
<sensor type="ray" name="rplidar">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>5.5</update_rate>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1</resolution>
<min_angle>-3</min_angle>
<max_angle>3</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>6.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="gazebo_rplidar" filename="libgazebo_ros_laser.so">
<topicName>/scan</topicName>
<frameName>laser_link</frameName>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
</robot>
(3)、lidar_robot.xacro——机器人整合
urdf文件下编写lidar_robot.xacro
<?xml version="1.0"?>
<robot name="arm" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find slam_sim_demo)/urdf/robot_model.xacro"/>
<xacro:include filename="$(find slam_sim_demo)/urdf/lidar_model.xacro"/>
<xacro:property name="lidar_offset_x" value="0" />
<xacro:property name="lidar_offset_y" value="0" />
<xacro:property name="lidar_offset_z" value="0.12" />
<robot_base/>
<!-- lidar -->
<joint name="lidar_joint" type="fixed">
<origin xyz="${lidar_offset_x} ${lidar_offset_y} ${lidar_offset_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="laser_link"/>
</joint>
<xacro:rplidar prefix="laser"/>
</robot>
至此机器人模型建立完毕
3、launch文件的编写
(1)view_robot.launch的编写
在launch文件下编写view_robot.launch用于运行rviz
<launch>
<arg name="Robot_model" />
<arg name="gui" default="False" />
<param name="robot_description" command="$(find xacro)/xacro.py $(find slam_sim_demo)/urdf/lidar_robot.xacro" />
<param name="use_gui" value="$(arg gui)"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find urdf_tutorial)/urdf.rviz" />
</launch>
运行后添加相应属性得到结果如图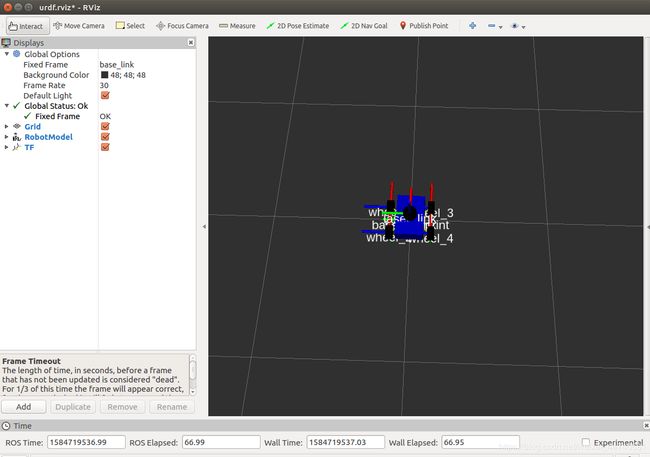
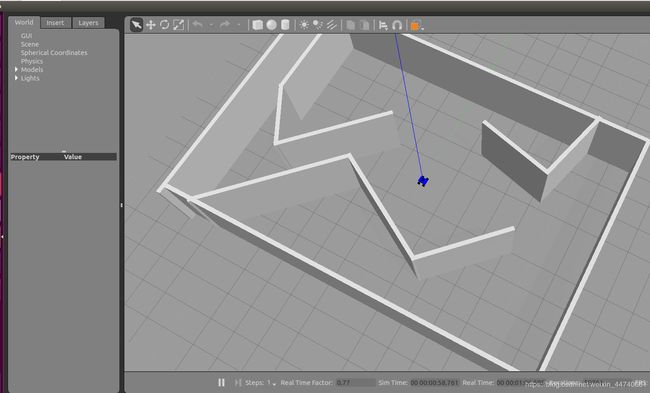
(2)gazebo.launch的编写
注意地图文件
<?xml version="1.0"?>
<launch>
<!-- these are the arguments you can pass this launch file, for example paused:=true -->
<arg name="paused" default="true"/>
<arg name="use_sim_time" default="false"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="true"/>
//empty_world.lauch已经被写好,my_house.world自己创建
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="worlds/my_house.world"/> //自己画的房间
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="true"/>
<arg name="gui" value="true"/>
<arg name="headless" value="false"/>
<arg name="debug" value="false"/>
</include>
<!-- Load the URDF into the ROS Parameter Server -->
<arg name="model" default="$(find slam_sim_demo)/urdf/lidar_robot.xacro" />//导入创建好的xacro文件
<param name="robot_description"
command="$(find xacro)/xacro.py $(arg model)" />
<!-- Run a python script to the send a service call to gazebo_ros to spawn a URDF robot -->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model robot1 -param robot_description -z 0.05"/>
</launch>
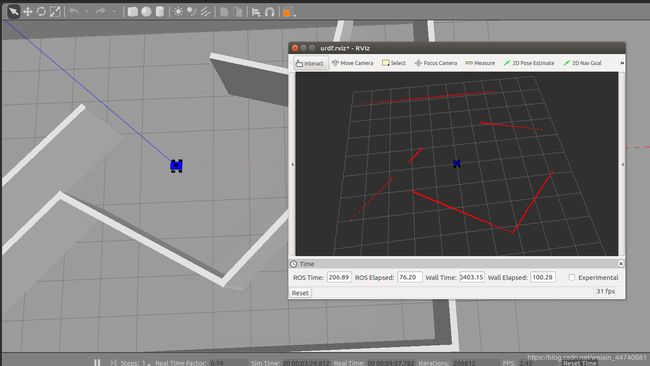
运行结果如图
在gazebo中点击play按钮(最底下状态栏中)后同时运行view_robot.launch并添加激光雷达数据可看到
环境:gazebo7.16+ubuntu16.04+vmware+ros kinetic
4、总结
最开始创立模型时一顾的找源码复制粘贴导致经常出错时看不太懂,后来主动去了解urdf和xacro文件的编写规则语法,直至基本看得懂的模型文件,主要是看的懂模型参数。
通过对urdf模型文件的接触,学习到了tf相关的知识,了解到了机器人各个部件的联系。
5、参考
1、移动机器人导航仿真(1)——3D建模与简单移动.
下一篇
ROS学习——移动机器人导航仿真(二).