激光雷达稀疏投影图插值
github上已经有实现激光雷达投影图插值的代码,不过是用Matlab写的,生成的结果或多或少有些问题。本文主要是用python把代码重写了一遍。
具体内容请访问LiDAR-Sparse-Projection-Map-Interpolation,希望对有需要的人有帮助
此处以点云深度插值为例:
import os
import os.path as osp
import sys
import glob
import time
import numpy as np
import cv2
from scipy.interpolate import griddata
import matplotlib.pyplot as plt
#设定深度范围
min_range = 5
max_range = 80
#输入输出文件夹
img_dir ="./Images/"
lidar_dir = "./LiDAR/"
calib_file = "calibration.txt"
ouput_dir ="./DenseDepthMap/"
if osp.exists(ouput_dir):
print('Output directory already exists:', ouput_dir)
else:
os.makedirs( ouput_dir );
print('Creating DenseIMG:', ouput_dir)
#read files
img_files = glob.glob(osp.join(img_dir, '*.png'))
lidar_files = glob.glob(osp.join(lidar_dir, '*.bin'))
img_files.sort()
lidar_files.sort()
def read_calib_file(filepath):
"""Read in a calibration file and parse into a dictionary."""
data = {}
with open(filepath, 'r') as f:
for line in f.readlines():
key, value = line.split(':', 1)
# The only non-float values in these files are dates, which
# we don't care about anyway
try:
data[key] = np.array([float(x) for x in value.split()])
except ValueError:
pass
return data
# read calibration.txt
calib = read_calib_file(calib_file)
R_rect_00 = np.zeros((4, 4))
R_rect_00[:3,:3] = np.array(calib['R0_rect']).reshape(-1, 3)
R_rect_00[3,3] = 1.
P_rect_02 = np.zeros((4, 4))
P_rect_02[:3, :] = np.array(calib['P2']).reshape(-1, 4)
P_rect_02[3, 3] = 1.
vel2cam0 = np.zeros((4, 4))
vel2cam0[:3,:] = np.array(calib['Tr_velo_to_cam']).reshape(-1, 4)
vel2cam0[3,3] = 1.
# compute transform matrix
T_lidar_camera = np.dot(R_rect_00, vel2cam0) #KITTI激光雷达点云到相机2坐标系的RT矩阵
P_lidar_image = np.dot(P_rect_02, T_lidar_camera) #P_rect_02相机2的内参矩阵
#load
for i, lidar_file in enumerate(lidar_files):
print(i,'Generating dense depth image from:', osp.basename(lidar_file))
start_time = time.time()
with open(lidar_file, 'r') as f:
pointcloud = np.fromfile(f, dtype=np.float32).reshape(-1, 4)
image = cv2.imread(img_files[i])
h, w, _= image.shape
pointcloud = pointcloud[np.logical_and((pointcloud[:, 1] < pointcloud[:, 0] - 0.27), (-pointcloud[:, 1] < pointcloud[:, 0] - 0.27))]
pixel = np.dot(P_lidar_image, pointcloud.T).T
pixel[:,0] = np.divide(pixel[:,0], pixel[:, 2])
pixel[:,1] = np.divide(pixel[:,1], pixel[:, 2])
pixel[:,:2] = np.round(pixel[:,:2]).astype(np.uint16)
pixel = pixel[(pixel[:,0] >= 0) & (pixel[:,0] < w) & (pixel[:,1] >= 0) & (pixel[:,1] < h)]
# post process: unique pixel with closest distances
_, ia = np.unique(pixel[:, :2], axis=0, return_index=True) # unique value (keeps closest points)
pixel = pixel[ia,:] # [r c depth reflectance],
#sparse maps
dms = np.zeros((h, w)) # reflectance map
dms[pixel[:, 1].astype(np.uint16), pixel[:, 0].astype(np.uint16)] = pixel[:, 3]
# interpolation reflectance-map
row, col = np.meshgrid(np.linspace(0, w-1, num=w), np.linspace(0, h-1, num=h))
dmd = griddata(pixel[:, :2], pixel[:, 2], (row, col), method='nearest') #try 'nearest','linear'
dmd = (dmd - min_range) / (max_range - min_range)
dmd = np.where(dmd < 0, 0, dmd)
dmd = np.where(dmd > 1, 1, dmd)
# mask the result to the ROI
mask = np.zeros((h, w)) # initialize mask
index = (dms != 0).argmax(axis=0)
for i in range(w):
mask[index[i]:, i] = 1
kernel = np.ones((2, 10), np.uint8)
mask = cv2.dilate(mask,kernel,iterations = 1) # by Dilation
## mask the reflectance map
dm = mask*(255*dmd).astype(np.uint8)
#Save
plt.imsave(ouput_dir+osp.splitext(osp.basename(lidar_file))[0]+".jpg", dm, cmap="jet")
# cv2.imwrite(ouput_dir+osp.splitext(osp.basename(lidar_file))[0]+".jpg", dm)
print("Saving as :",ouput_dir+osp.splitext(osp.basename(lidar_file))[0]+".jpg")
end_time = time.time()
print("Time Consuming :", end_time - start_time)
print()
效果:

RGB图像
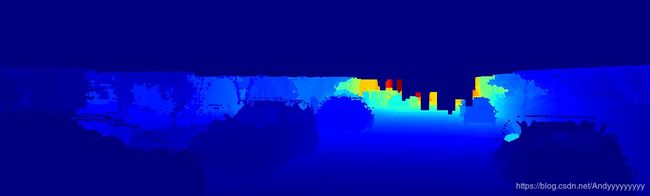
点云稠密深度投影图
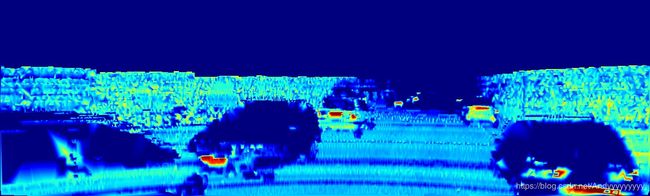
点云稠密反射率投影图