线性代数: 什么是矩阵,以及矩阵的线性代数意义
多数高中生学习矩阵和矩阵乘法,但是他们往往不知道为什么矩阵乘法是这样工作的。
添加矩阵很简单: 只需添加相应的条目。 然而,矩阵乘法并不是这样工作的,对于一个不理解矩阵背后理论的人来说,这种矩阵相乘的方法可能看起来非常不自然和奇怪。
为了真正理解矩阵,我们把它们看作是更大图景的一部分。 矩阵表示空间之间的函数,称为向量空间,也不是任何函数,而是线性函数。 这实际上就是线性代数关注矩阵的原因。
关于矩阵的两个基本事实是: 每个矩阵表示一个线性函数,每个线性函数表示一个矩阵。
因此,实际上在矩阵和线性函数之间存在双射。 我们将说明,乘法矩阵对应于对它们所表示的函数进行合成。接下来,我们将研究矩阵有什么好处,以及为什么线性代数首先兴起。
最有可能的是,如果你在高中学过代数,你会看到下面这些东西:
![]()
你的高中代数老师可能告诉你这是一个“矩阵” 然后你学习了如何用矩阵做事情。 例如,你可以相加两个矩阵,操作相当直观:
你也可以减去矩阵,它的工作原理类似。 你可以用一个数字乘以一个矩阵:
然后,当你学习如何乘法矩阵时,一切似乎都错了:
![]()
也就是说,要找到乘积的第 i 行, j 列中的条目,你看第一个矩阵的第i行,第二个矩阵的第 j列,你把它们的相应数字相乘,然后你把结果加起来,得到那个位置的条目。
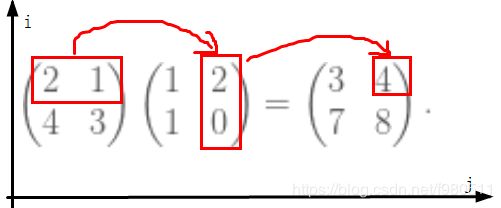
在上面的例子中,第一行和第二列的条目结果是 4,因为第一个矩阵的第一行是 ,第二个矩阵的第二列是
,第二个矩阵的第二列是![]() 。 此外,这意味着矩阵乘法甚至不是交换的! 如果我们按照上面的乘法顺序
。 此外,这意味着矩阵乘法甚至不是交换的! 如果我们按照上面的乘法顺序![]() 计算,那我们可以计算如下另外一个矩阵相乘进行学习,例如
计算,那我们可以计算如下另外一个矩阵相乘进行学习,例如
![]()
为什么矩阵乘法不像加法和减法那样工作? 如果乘法是这样运算的,那么除法到底是怎么运算的呢? 这篇文章的目的就是回答这些问题。
为理解矩阵乘法为什么是这样工作的,有必要理解矩阵实际上是什么。 但是在我们开始之前,让我们简单的看一下为什么我们首先关心矩阵。
矩阵最基本的应用是求解线性方程组。
一个线性方程是所有变量单独出现而没有幂的方程; 它们不会相乘或相乘,也没有有趣的函数。 线性方程组的一个例子是
![]()
这个系统的解是![]() 。 这样的方程式看似简单,但在生活中却很容易出现。
。 这样的方程式看似简单,但在生活中却很容易出现。
例如,假设有两个朋友 舒克 和 贝塔 去买糖果。 舒克 买了2块巧克力和1袋彩虹糖,花了3块钱; 而 贝塔 买了4块巧克力和3袋彩虹糖,花了7块钱。 如果我们想知道巧克力棒和彩虹糖的价格,我们可以设定一块巧克力棒的价格 x,设定一包彩虹糖的价格 y,变量满足上述线性方程组。 因此我们可以很简单的推断出,一块巧克力和一包彩虹糖都要1块钱。 这个系统特别容易解决,因为人们可以猜测和检查的解决方案,但一般来说,用变量和方程式代来解决类似问题,会更困难些。 这就是矩阵的用武之地! 请注意,到了矩阵乘法,上面的线性方程组可以改写为
如果我们能找到一个矩阵 A,它是矩阵![]() 的逆矩阵,那么如果我们将 A 同时乘在方程的两边,将左边的
的逆矩阵,那么如果我们将 A 同时乘在方程的两边,将左边的![]() 约掉,右边增一个 A,我们就能得到
约掉,右边增一个 A,我们就能得到
![]()
矩阵的应用远远超出了这个简单的问题,但是现在我们将把它作为我们的动机。 让我们回到理解矩阵是什么。 为了理解矩阵,我们必须知道向量是什么。 向量空间是一个具有特定的集合,而向量是向量空间的元素。 现在,为了技术上的简单性,我们将只使用实数上的向量空间,也称为实向量空间(real vector space)。 一个真正的向量空间,基本上就是你想构成的空间。 例如线是一维实向量空间,x-y 平面是二维实向量空间,三维空间是三维实向量空间,等等。
如果你在学校学过矢量,那么你可能很熟悉把它们想象成箭头,你可以把它们加在一起,乘以一个实数,等等,但是把矢量加在一起的结果是不同的。 这听起来熟悉吗? 应该是的。 这就是矩阵的工作原理,这不是巧合。
关于空间向量最重要的事实是它们总是有基的。 向量空间的基础是一组向量,这样空间中的任何向量都可以写成这些向量的线性组合。 如果![]() 是你的基础向量(即每个维度上的一段单位向量),那么
是你的基础向量(即每个维度上的一段单位向量),那么![]() 是一个线性组合,如果
是一个线性组合,如果![]() 是实数,将也可以表示在这个向量空间中的任何一个向量。 一个具体的例子如下: x-y 平面的
是实数,将也可以表示在这个向量空间中的任何一个向量。 一个具体的例子如下: x-y 平面的![]() 是基础向量。 那么任何向量的形式都可以写成
是基础向量。 那么任何向量的形式都可以写成
![]()
所以我们确实有一个基础! 这不是唯一可能的基础。 事实上,在我们的基础上的向量,甚至不必是垂直的! 例如,矢量![]() 构成了基础,因为我们可以写
构成了基础,因为我们可以写
.
现在,线性映射只是两个向量空间之间的一个函数,碰巧是线性的。 线性是一个非常好的性质。
如果下列两个属性成立,那么函数 就是线性的:
就是线性的:
![]()
例如,该函数 在实线限定上不是线性的,因为
在实线限定上不是线性的,因为 而
而 。现在,我们将迄今为止所讨论的所有想法联系在一起:矩阵,基础和线性变换。即矩阵是线性变换的表示,你可以通过查看矩阵基础的作用来弄清楚如何写下矩阵。要理解第一个陈述,我们需要了解为什么第二个陈述是正确的。这个想法是任何向量都是基向量的线性组合,因此您只需要知道线性变换如何影响每个基向量。这是因为,由于函数是线性的,如果我们有一个
。现在,我们将迄今为止所讨论的所有想法联系在一起:矩阵,基础和线性变换。即矩阵是线性变换的表示,你可以通过查看矩阵基础的作用来弄清楚如何写下矩阵。要理解第一个陈述,我们需要了解为什么第二个陈述是正确的。这个想法是任何向量都是基向量的线性组合,因此您只需要知道线性变换如何影响每个基向量。这是因为,由于函数是线性的,如果我们有一个 可以写成线性组合的任意向量
可以写成线性组合的任意向量 ,那么
,那么

请注意,值 完全由值决定
完全由值决定 ,因此我们需要完全定义线性变换所需的所有信息。矩阵在哪里?那么,一旦我们选择线性变换的域和目标的基础,矩阵的列将表示函数下的基矢量的图像。例如,假设我们有一个映射
,因此我们需要完全定义线性变换所需的所有信息。矩阵在哪里?那么,一旦我们选择线性变换的域和目标的基础,矩阵的列将表示函数下的基矢量的图像。例如,假设我们有一个映射 到的线性变换
到的线性变换 ,意味着它采用三维向量并吐出二维向量。现在只是一些抽象的功能,我们无法在纸上写下来。让我们为我们的域(3空间)和目标(2空间或平面)选择基础。一个不错的选择是
,意味着它采用三维向量并吐出二维向量。现在只是一些抽象的功能,我们无法在纸上写下来。让我们为我们的域(3空间)和目标(2空间或平面)选择基础。一个不错的选择是 前者和
前者和 对于后者。我们需要知道的是如何影响
对于后者。我们需要知道的是如何影响 ,目标的基础是具体地写下价值观。
,目标的基础是具体地写下价值观。 我们函数的矩阵将是一个2乘3的矩阵,其中3列被索引,2行被索引
我们函数的矩阵将是一个2乘3的矩阵,其中3列被索引,2行被索引 。我们需要记下的就是价值观。具体来说,让我们说吧
。我们需要记下的就是价值观。具体来说,让我们说吧
然后相应的矩阵将是

这样做的原因是矩阵乘法的设计使得如果将矩阵乘以向量乘以除 -th条目中的1之外的全零,则结果只是矩阵的第-列。你可以自己检查一下。因此我们知道矩阵在应用于(相乘)基矢量时可以正常工作。而且矩阵满足相同的性质的线性变换,即
-th条目中的1之外的全零,则结果只是矩阵的第-列。你可以自己检查一下。因此我们知道矩阵在应用于(相乘)基矢量时可以正常工作。而且矩阵满足相同的性质的线性变换,即 和
和 ,其中
,其中 的载体和
的载体和 为实数。因此适用于所有向量,因此它是正确的表示。请注意,如果我们为基向量选择了不同的向量,则矩阵看起来会有所不同。因此,矩阵不是自然的,因为它们取决于我们选择的基础。
为实数。因此适用于所有向量,因此它是正确的表示。请注意,如果我们为基向量选择了不同的向量,则矩阵看起来会有所不同。因此,矩阵不是自然的,因为它们取决于我们选择的基础。
现在,最后回答一开始提出的问题。为什么矩阵乘法按照它的方式工作?让我们来看看我们在开始时使用的两个矩阵: 和
和 。我们知道,它们分别对应于线性函数在飞机上,让我们称他们和
。我们知道,它们分别对应于线性函数在飞机上,让我们称他们和 分别。乘法矩阵对应于组成 它们的函数。因此,做
分别。乘法矩阵对应于组成 它们的函数。因此,做 与
与 任何向量相同
任何向量相同 。为了确定矩阵
。为了确定矩阵 应该是什么样子,我们可以看到它如何影响基矢量。我们有
应该是什么样子,我们可以看到它如何影响基矢量。我们有
![]()
所以第一列应该是 ,和
,和

所以第二列应该是 。实际上,这与我们在开始时通过矩阵乘法得到的答案一致!虽然这根本不是一个严格的证明,因为它只是一个例子,它捕捉了矩阵乘法就是这样的原因。
。实际上,这与我们在开始时通过矩阵乘法得到的答案一致!虽然这根本不是一个严格的证明,因为它只是一个例子,它捕捉了矩阵乘法就是这样的原因。
现在我们已经了解矩阵乘法如何以及为什么按照它的方式工作,矩阵划分如何工作?您可能熟悉功能反转。 函数的逆是一个函数,使得 所有函数。由于矩阵的乘法对应于函数的组合,所以只有矩阵的乘法逆是相应函数的组合逆才有意义。这就是为什么不是所有矩阵都有乘法逆。有些函数没有组合反转!例如,线性函数映射到
所有函数。由于矩阵的乘法对应于函数的组合,所以只有矩阵的乘法逆是相应函数的组合逆才有意义。这就是为什么不是所有矩阵都有乘法逆。有些函数没有组合反转!例如,线性函数映射到 定义由
定义由 不具有逆,因为许多矢量被映射到相同的值(什么会
不具有逆,因为许多矢量被映射到相同的值(什么会 是?
是? ?
? ?)。这对应于1×2矩阵
?)。这对应于1×2矩阵 没有乘法逆的事实。因此,如果存在,则除以矩阵
没有乘法逆的事实。因此,如果存在,则除以矩阵 只是乘以
只是乘以 。有用于计算矩阵求逆的算法,但我们会将其保存为另一篇文章
。有用于计算矩阵求逆的算法,但我们会将其保存为另一篇文章