深度学习笔记3
过拟合、欠拟合
过拟合、欠拟合的概念
权重衰减
丢弃法
模型选择、过拟合和欠拟合
训练误差和泛化误差
在解释上述现象之前,我们需要区分训练误差(training error)和泛化误差(generalization error)。通俗来讲,前者指模型在训练数据集上表现出的误差,后者指模型在任意一个测试数据样本上表现出的误差的期望,并常常通过测试数据集上的误差来近似。计算训练误差和泛化误差可以使用之前介绍过的损失函数,例如线性回归用到的平方损失函数和softmax回归用到的交叉熵损失函数。
机器学习模型应关注降低泛化误差。
模型选择
验证数据集
从严格意义上讲,测试集只能在所有超参数和模型参数选定后使用一次。不可以使用测试数据选择模型,如调参。由于无法从训练误差估计泛化误差,因此也不应只依赖训练数据选择模型。鉴于此,我们可以预留一部分在训练数据集和测试数据集以外的数据来进行模型选择。这部分数据被称为验证数据集,简称验证集(validation set)。例如,我们可以从给定的训练集中随机选取一小部分作为验证集,而将剩余部分作为真正的训练集。
K折交叉验证
由于验证数据集不参与模型训练,当训练数据不够用时,预留大量的验证数据显得太奢侈。一种改善的方法是K折交叉验证(K-fold cross-validation)。在K折交叉验证中,我们把原始训练数据集分割成K个不重合的子数据集,然后我们做K次模型训练和验证。每一次,我们使用一个子数据集验证模型,并使用其他K-1个子数据集来训练模型。在这K次训练和验证中,每次用来验证模型的子数据集都不同。最后,我们对这K次训练误差和验证误差分别求平均。
过拟合和欠拟合
接下来,我们将探究模型训练中经常出现的两类典型问题:
一类是模型无法得到较低的训练误差,我们将这一现象称作欠拟合(underfitting);
另一类是模型的训练误差远小于它在测试数据集上的误差,我们称该现象为过拟合(overfitting)。 在实践中,我们要尽可能同时应对欠拟合和过拟合。虽然有很多因素可能导致这两种拟合问题,在这里我们重点讨论两个因素:模型复杂度和训练数据集大小。
模型复杂度
为了解释模型复杂度,我们以多项式函数拟合为例。给定一个由标量数据特征和对应的标量标签组成的训练数据集,多项式函数拟合的目标是找一个阶多项式函数
来近似 。在上式中,是模型的权重参数,是偏差参数。与线性回归相同,多项式函数拟合也使用平方损失函数。特别地,一阶多项式函数拟合又叫线性函数拟合。
给定训练数据集,模型复杂度和误差之间的关系:
训练数据集大小
影响欠拟合和过拟合的另一个重要因素是训练数据集的大小。一般来说,如果训练数据集中样本数过少,特别是比模型参数数量(按元素计)更少时,过拟合更容易发生。此外,泛化误差不会随训练数据集里样本数量增加而增大。因此,在计算资源允许的范围之内,我们通常希望训练数据集大一些,特别是在模型复杂度较高时,例如层数较多的深度学习模型。
import torch
import numpy as np
import sys
sys.path.append("/home/kesci/input")
import d2lzh1981 as d2l
print(torch.__version__)
def semilogy(x_vals, y_vals, x_label, y_label, x2_vals=None, y2_vals=None,
legend=None, figsize=(3.5, 2.5)):
# d2l.set_figsize(figsize)
d2l.plt.xlabel(x_label)
d2l.plt.ylabel(y_label)
d2l.plt.semilogy(x_vals, y_vals)
if x2_vals and y2_vals:
d2l.plt.semilogy(x2_vals, y2_vals, linestyle=':')
d2l.plt.legend(legend)
num_epochs, loss = 100, torch.nn.MSELoss()
def fit_and_plot(train_features, test_features, train_labels, test_labels):
# 初始化网络模型
net = torch.nn.Linear(train_features.shape[-1], 1)
# 通过Linear文档可知,pytorch已经将参数初始化了,所以我们这里就不手动初始化了
# 设置批量大小
batch_size = min(10, train_labels.shape[0])
dataset = torch.utils.data.TensorDataset(train_features, train_labels) # 设置数据集
train_iter = torch.utils.data.DataLoader(dataset, batch_size, shuffle=True) # 设置获取数据方式
optimizer = torch.optim.SGD(net.parameters(), lr=0.01) # 设置优化函数,使用的是随机梯度下降优化
train_ls, test_ls = [], []
for _ in range(num_epochs):
for X, y in train_iter: # 取一个批量的数据
l = loss(net(X), y.view(-1, 1)) # 输入到网络中计算输出,并和标签比较求得损失函数
optimizer.zero_grad() # 梯度清零,防止梯度累加干扰优化
l.backward() # 求梯度
optimizer.step() # 迭代优化函数,进行参数优化
train_labels = train_labels.view(-1, 1)
test_labels = test_labels.view(-1, 1)
train_ls.append(loss(net(train_features), train_labels).item()) # 将训练损失保存到train_ls中
test_ls.append(loss(net(test_features), test_labels).item()) # 将测试损失保存到test_ls中
print('final epoch: train loss', train_ls[-1], 'test loss', test_ls[-1])
semilogy(range(1, num_epochs + 1), train_ls, 'epochs', 'loss',
range(1, num_epochs + 1), test_ls, ['train', 'test'])
print('weight:', net.weight.data,
'\nbias:', net.bias.data)
fit_and_plot(poly_features[:n_train, :], poly_features[n_train:, :], labels[:n_train], labels[n_train:])
fit_and_plot(features[:n_train, :], features[n_train:, :], labels[:n_train], labels[n_train:])
fit_and_plot(poly_features[0:2, :], poly_features[n_train:, :], labels[0:2], labels[n_train:])
梯度消失、梯度爆炸
深度模型有关数值稳定性的典型问题是消失(vanishing)和爆炸(explosion)。
当神经网络的层数较多时,模型的数值稳定性容易变差。
假设一个层数为的多层感知机的第层的权重参数为,输出层的权重参数为。为了便于讨论,不考虑偏差参数,且设所有隐藏层的激活函数为恒等映射(identity mapping)。给定输入,多层感知机的第层的输出。此时,如果层数较大,的计算可能会出现衰减或爆炸。举个例子,假设输入和所有层的权重参数都是标量,如权重参数为0.2和5,多层感知机的第30层输出为输入分别与(消失)和(爆炸)的乘积。当层数较多时,梯度的计算也容易出现消失或爆炸。
随机初始化模型参数
在神经网络中,通常需要随机初始化模型参数。下面我们来解释这样做的原因。
回顾多层感知机一节描述的多层感知机。为了方便解释,假设输出层只保留一个输出单元(删去和以及指向它们的箭头),且隐藏层使用相同的激活函数。如果将每个隐藏单元的参数都初始化为相等的值,那么在正向传播时每个隐藏单元将根据相同的输入计算出相同的值,并传递至输出层。在反向传播中,每个隐藏单元的参数梯度值相等。因此,这些参数在使用基于梯度的优化算法迭代后值依然相等。之后的迭代也是如此。在这种情况下,无论隐藏单元有多少,隐藏层本质上只有1个隐藏单元在发挥作用。因此,正如在前面的实验中所做的那样,我们通常将神经网络的模型参数,特别是权重参数,进行随机初始化。
要考虑环境因素
ModernRNN
RNN存在的问题:梯度较容易出现衰减或爆炸(BPTT)
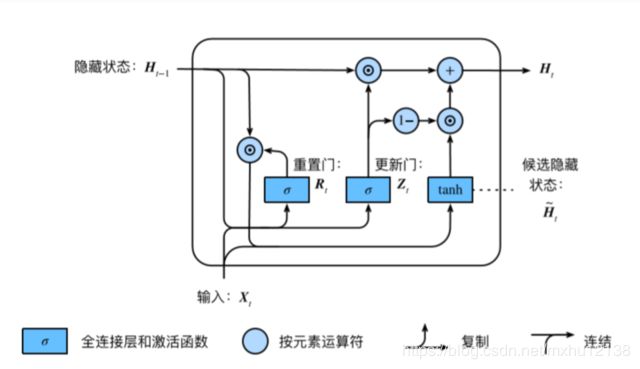
⻔控循环神经⽹络:捕捉时间序列中时间步距离较⼤的依赖关系
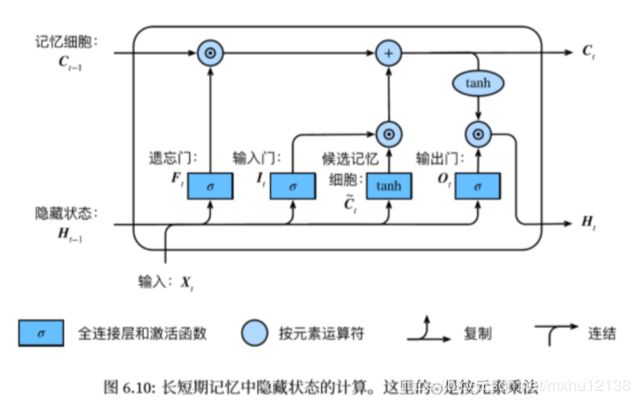
LSTM
长短期记忆long short-term memory :
遗忘门:控制上一时间步的记忆细胞 输入门:控制当前时间步的输入
输出门:控制从记忆细胞到隐藏状态
记忆细胞:⼀种特殊的隐藏状态的信息的流动