转自:NMS——非极大值抑制
这篇文章说的不是很清楚,NMS的过程是这样的(出自:非极大抑制(Non-maximum suppression)):
先假设有6个矩形框,根据分类器类别分类概率做排序,从小到大分别属于车辆的概率分别为A、B、C、D、E、F。
(1)从最大概率矩形框F开始,分别判断A~E与F的重叠度IOU是否大于某个设定的阈值;
(2)假设B、D与F的重叠度超过阈值,那么就扔掉B、D;并标记第一个矩形框F,是我们保留下来的。
(3)从剩下的矩形框A、C、E中,选择概率最大的E,然后判断E与A、C的重叠度,重叠度大于一定的阈值,那么就扔掉;并标记E是我们保留下来的第二个矩形框。
就这样一直重复,找到所有被保留下来的矩形框。
NMS(non maximum suppression),中文名非极大值抑制,在很多计算机视觉任务中都有广泛应用,如:边缘检测、目标检测等。
这里主要以人脸检测中的应用为例,来说明NMS,并给出Matlab和C++示例程序。
NMS改进:一行代码改进NMS
人脸检测的一些概念
(1) 绝大部分人脸检测器的核心是分类器,即给定一个尺寸固定图片,分类器判断是或者不是人脸;
(2)将分类器进化为检测器的关键是:在原始图像上从多个尺度产生窗口,并resize到固定尺寸,然后送给分类器做判断。最常用的方法是滑动窗口。
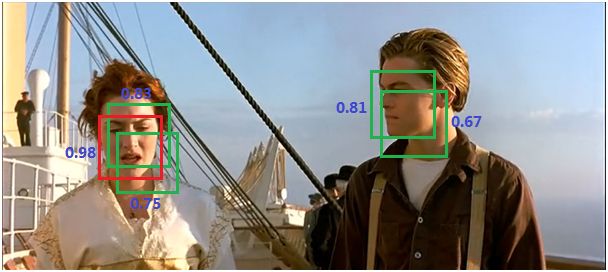
以下图为例,由于滑动窗口,同一个人可能有好几个框(每一个框都带有一个分类器得分)

而我们的目标是一个人只保留一个最优的框:
于是我们就要用到非极大值抑制,来抑制那些冗余的框: 抑制的过程是一个迭代-遍历-消除的过程。
(1)将所有框的得分排序,选中最高分及其对应的框:
(2)遍历其余的框,如果和当前最高分框的重叠面积(IOU)大于一定阈值,我们就将框删除。

(3)从未处理的框中继续选一个得分最高的,重复上述过程。

下面给出MATLAB下的快速NMS代码,并带有详细的注释:
%% NMS:non maximum suppression
function pick = nms(boxes,threshold,type)
% boxes: m x 5,表示有m个框,5列分别是[x1 y1 x2 y2 score]
% threshold: IOU阈值
% type:IOU阈值的定义类型
% 输入为空,则直接返回
if isempty(boxes)
pick = [];
return;
end
% 依次取出左上角和右下角坐标以及分类器得分(置信度)
x1 = boxes(:,1);
y1 = boxes(:,2);
x2 = boxes(:,3);
y2 = boxes(:,4);
s = boxes(:,5);
% 计算每一个框的面积
area = (x2-x1+1) .* (y2-y1+1);
%将得分升序排列
[vals, I] = sort(s);
%初始化
pick = s*0;
counter = 1;
% 循环直至所有框处理完成
while ~isempty(I)
last = length(I); %当前剩余框的数量
i = I(last);%选中最后一个,即得分最高的框
pick(counter) = i;
counter = counter + 1;
%计算相交面积
xx1 = max(x1(i), x1(I(1:last-1)));
yy1 = max(y1(i), y1(I(1:last-1)));
xx2 = min(x2(i), x2(I(1:last-1)));
yy2 = min(y2(i), y2(I(1:last-1)));
w = max(0.0, xx2-xx1+1);
h = max(0.0, yy2-yy1+1);
inter = w.*h;
%不同定义下的IOU
if strcmp(type,'Min')
%重叠面积与最小框面积的比值
o = inter ./ min(area(i),area(I(1:last-1)));
else
%交集/并集
o = inter ./ (area(i) + area(I(1:last-1)) - inter);
end
%保留所有重叠面积小于阈值的框,留作下次处理
I = I(find(o<=threshold));
end
pick = pick(1:(counter-1));
end
https://github.com/AITTSMD/MTCNN-Tensorflow 中的python 实现:
import numpy as np
def py_nms(dets, thresh, mode="Union"):
"""
greedily select boxes with high confidence
keep boxes overlap <= thresh
rule out overlap > thresh
:param dets: [[x1, y1, x2, y2 score]]
:param thresh: retain overlap <= thresh
:return: indexes to keep
"""
x1 = dets[:, 0]
y1 = dets[:, 1]
x2 = dets[:, 2]
y2 = dets[:, 3]
scores = dets[:, 4]
areas = (x2 - x1 + 1) * (y2 - y1 + 1)
order = scores.argsort()[::-1]
keep = []
while order.size > 0:
i = order[0]
keep.append(i)
xx1 = np.maximum(x1[i], x1[order[1:]])
yy1 = np.maximum(y1[i], y1[order[1:]])
xx2 = np.minimum(x2[i], x2[order[1:]])
yy2 = np.minimum(y2[i], y2[order[1:]])
w = np.maximum(0.0, xx2 - xx1 + 1)
h = np.maximum(0.0, yy2 - yy1 + 1)
inter = w * h
if mode == "Union":
ovr = inter / (areas[i] + areas[order[1:]] - inter)
elif mode == "Minimum":
ovr = inter / np.minimum(areas[i], areas[order[1:]])
#keep
inds = np.where(ovr <= thresh)[0]
order = order[inds + 1]
return keep