【论文阅读笔记】——GMNN: Graph Markov Neural Networks
ICML2019《GMNN: Graph Markov Neural Networks》 by Meng Qu, Yoshua Bengio, Jian Tang,GNN工作的又一创新,将统计关系学习(SRL)和图神经网络(GNN)结合,该方法适用于图节点分类、节点关系分类,以及无监督的节点表示学习任务。原文地址:https://arxiv.org/abs/1905.06214v1
引言
现实社会的网络中,实体可以被看做一个个的网络节点(在统计关系学习中记作objects/对象,在图中记作节点/nodes),实体的类别可以被看做网络节点的标签(labels),同时每个节点会存在一系列的属性,我们把它们记作features或attributes。当我们为节点做分类任务时,我们通常会以节点的特征为重心,将特征向量送入分类器做训练,但我们同时要考虑两个点:
- 邻居节点同质性:相连的节点类别趋近相同
- 标签依赖关系:某些标签更有可能同时出现。如,篮球和NBA可能会是相邻节点,飞机和牛奶很难产生关系等
传统的关于关系数据建模的方法主要跟从两个工作:统计关系学习SRL(如关系马尔科夫网络等)和图神经网络GNN(如GCN等)。
SRL:统计关系学习,通常利用条件随机场CRF来对节点标签依赖关系进行建模。
- 优点:CRF可以学习到节点标签之间的联合分布。
- 缺点:需要手工定义特征函数进行一系列的线性组合来组成势函数,通常这些特征函数都是启发式的,也就是特征需要人工定义,表达能力有限。再一个,网络中的节点关系结构非常复杂,计算节点标签之间的后验分布十分困难。
GNN: 图神经网络通过非线性的神经元架构来学习到节点的特征表示,整个网络进行端到端的分类,目前的GCN和GAT两个主要模型都达到了非常好的效果。
- 优点:强大的特征表达能力,考虑到网络节点的邻接关系。
- 缺点:忽略了标签之间的依赖关系,训练时将节点标签独立地进行预测。
作者由此提出GMNN:Graph Markov Neural Networks,将两者的优点结合在一起:利用CRF学习标签的联合分布,通过伪似然变分pseudolikelihood variational EM算法进行更新迭代:
- M-step:通过GNN学习节点的特征表示,得到更新后的的参数来最大化pseudolikelihood;
- E-step:对节点标签的局部条件分布进行建模,推断未标注节点的标签。
问题
考虑半监督学习中的一个图G=(V,E,xV),其中V是节点(srl中记作对象)的结合,E是节点之间边的集合,xV是所有节点属性的集合(可以理解为节点不同维度的特征)。已知一部分标签yL,L∈V,我们的任务是预测剩下未知的标签yU,U = V \ L。
方法
SRL
大多使用CRF进行对象标签预测的SRL方法采用公式:
 ψ是边上的势函数,一般是人工定义的特征函数的线性组合。
ψ是边上的势函数,一般是人工定义的特征函数的线性组合。
这种情况下,预测未知标签任务被看做是推断问题,我们还要去计算位置标签的后验分布p(yU|yL,xV),然而由于标签的复杂结构关系,后验十分难求。
GNN
与SRL相比,GNN忽略掉标签的依赖关系,只关注于节点的特征表示。由于GNN将标签之间视为独立,那么此情况下标签的联合分布表示为:
 因此,GNN独立地去预测每一个标签:
因此,GNN独立地去预测每一个标签:
![]() 其中h是|V|×d维的特征向量,W是权重,每一轮节点特征h都会通过自己的邻居进行更新。经过多层网络的学习,特征最后经过一个softmax分类器来预测最终的结果。整个工作可以看做一个端到端的训练。代表性的方法有GCN\GAT。
其中h是|V|×d维的特征向量,W是权重,每一轮节点特征h都会通过自己的邻居进行更新。经过多层网络的学习,特征最后经过一个softmax分类器来预测最终的结果。整个工作可以看做一个端到端的训练。代表性的方法有GCN\GAT。
使用GMNN做半监督节点分类
GMNN利用CRF通过对象属性(节点特征)来建模标签之间的联合分布:p(yV|xV),使用pseudolikelihood variational EM算法进行优化。其中,E-step中使用一个GNN来学习节点的特征表示以预测标签属性,M-step中使用另一个GNN来建模标签之间的依赖关系。
具体来看:
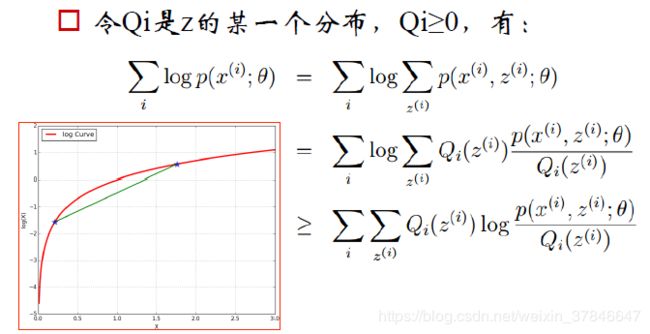
我们沿用CRF的预测模型:pφ(yV|xV),其中φ是模型参数,我们要做的是优化这个参数来求已知标签的最大似然:pφ(yL|xV)。由于存在大量的未知标签,直接最大化对数似然很困难,因此我们来最大化对数似然的下界(ELBO):

参考EM算法:
图片来源:https://www.cnblogs.com/vincentbnu/p/9503284.html
上式可以理解为:我们要预测的是已知特征空间xV下yL的分布,其中xV含参数φ,而同时存在一部分未知标签yU,含隐变量θ。根据EM算法,我们在E-step(推理) 时会固定pφ来更新qθ(yU|xV),实际上就是求一个后验概率pφ(yU|yL,xV)(详见EM算法推导)。在M-step(学习) 时,固定住qθ更新pφ来最大化似然函数:
![]() 对参数φ的更新又是一个难题(partition function的原因,但那究竟是什么我就不知道了),所以在为φ做优化时,我们采用伪似然公式来代替(4)的方式:
对参数φ的更新又是一个难题(partition function的原因,但那究竟是什么我就不知道了),所以在为φ做优化时,我们采用伪似然公式来代替(4)的方式:
 其中NB(n)是节点n的邻居,由推导得到,等式在pφ(yV|xV)独立时成立。(原文说用伪似然方法在马尔科夫网络里已经很实用了,没有做过多解释)
其中NB(n)是节点n的邻居,由推导得到,等式在pφ(yV|xV)独立时成立。(原文说用伪似然方法在马尔科夫网络里已经很实用了,没有做过多解释)
先看推理部分E
这一步的目标是去计算后验概率pφ(yU|yL,xV)。前文已经说了,由于标签之间的结构十分复杂,隐变量的后验概率很难通过贝叶斯公式求解,所以我们选择使用变分推断,即“使用已知简单分布来逼近需要推断的复杂分布,并通过限制近似分布的类型,从而得到一种局部最优,但具有确定解的近似后验分布”,来代替原来的后验分布。
这里引入mean-field method 平均场理论:平均场假设复杂的多变量Z可拆分为一系列相互独立的多变量Zi,i=1,⋯,M,且q分布可以因子化为这些多变量集的乘积:
 于是qθ可以表示为:
于是qθ可以表示为:
 n表示未知标签对象的索引,这里假设所有标签是独立的。我们用GNN来参数化这个qθ(yn|xV),由此学习到节点的表达:
n表示未知标签对象的索引,这里假设所有标签是独立的。我们用GNN来参数化这个qθ(yn|xV),由此学习到节点的表达:
 GNN通过对节点特征xV建模学习到了特征表示hθ(可以简单看做|xV|维的特征空间,θ是特征参数),GNN的好处就是可以学习到周围节点的特征进而丰富自己的特征表达。
GNN通过对节点特征xV建模学习到了特征表示hθ(可以简单看做|xV|维的特征空间,θ是特征参数),GNN的好处就是可以学习到周围节点的特征进而丰富自己的特征表达。
论文在附录证明了根据平均场理论,qθ(yn|xV)可以表达为:
 右式是其实在对pφ求期望。我们用采样来代替期望:
右式是其实在对pφ求期望。我们用采样来代替期望:
 其中y^NB(n) 是从节点n的邻居中采样的点,如果该采样节点k是未标注的,那么y^k服从qθ(yk|xV),如果节点k是已知标签的,那么直接采用其真实值。其实验证明在这一步只用采样一个邻居就可以达到不错的效果。根据(8)(9)式我们可以得到:
其中y^NB(n) 是从节点n的邻居中采样的点,如果该采样节点k是未标注的,那么y^k服从qθ(yk|xV),如果节点k是已知标签的,那么直接采用其真实值。其实验证明在这一步只用采样一个邻居就可以达到不错的效果。根据(8)(9)式我们可以得到:
![]() 现在我们假设已经知道在上一个E步中得到的θ,那么θ就可以带到M步中去学习到pφ(yV|y^NB(n),xV),此时学习到的pφ正是我们在当前M步中要去逼近的目标,我们的目标就是最小化qθ(yn|xV)和pφ(yn| y^NB(n),XV) 的kl散度:KL(pφ||qθ):
现在我们假设已经知道在上一个E步中得到的θ,那么θ就可以带到M步中去学习到pφ(yV|y^NB(n),xV),此时学习到的pφ正是我们在当前M步中要去逼近的目标,我们的目标就是最小化qθ(yn|xV)和pφ(yn| y^NB(n),XV) 的kl散度:KL(pφ||qθ):
 另外作者提出,θ也可以用已知标签进行训练,所以可以将y的真实标签带入进去来最大似然估计:
另外作者提出,θ也可以用已知标签进行训练,所以可以将y的真实标签带入进去来最大似然估计:
 最后我们将两部分结合起来就是E-step要去更新的目标:
最后我们将两部分结合起来就是E-step要去更新的目标:

现在来看学习部分M
在学习步骤中我们会固定住E-step得到的qθ来更新pφ,进而最大化公式(5)。其实根据上文的内容我们可以看到,pφ(yn| y^NB(n),XV) 在E和M过程中都会用到(见(5)和(11)),因此我们简化pφ中的联合分布,将它改成条件分布(我理解其实就是(4)式到(5)式的过程),然后我们再用另一个GNN来参数化它:
 我们将这个GNN记作GNNφ,由公式可以看出来,GNNφ将yn的邻居也视作特征进行训练,因此GNNφ可以建模标签多的局部依赖关系。我们通过训练GNNφ来优化φ使pφ最大,所以M步的目标函数为:
我们将这个GNN记作GNNφ,由公式可以看出来,GNNφ将yn的邻居也视作特征进行训练,因此GNNφ可以建模标签多的局部依赖关系。我们通过训练GNNφ来优化φ使pφ最大,所以M步的目标函数为:

优化过程
使用有标签节点按公式(11),来预训练qθ;
交替迭代训练pφ和qθ直至收敛;
事实上pφ和qθ都可以用来作为最后的标签预测,但实践中qθ的预测效果总是会很好,所以这里选择使用qθ来预测最后的输出。算法如图:

应用
除了上述的节点分类任务,GMNN适用于:
无监督节点表示学习
由于节点没有标签,我们的任务看作是为每个节点预测他的邻居节点,此时邻居节点作为伪标签,同时,所有未知标签看作隐变量。
边分类问题
给定部分有标签节点,GMNN可以为边进行分类。
我们为原始图G构造对偶图G’,我们将对偶图中的边集E’视作‘对象’,两条边E’1E’2如果相连,那么它们在原图G中的对应两边E是共享一个节点的。
未完待续