跑通VINS-Fusion全流程
跑通VINS-Fusion全流程
- 常规安装步骤详见官方
- 1.ROS安装
- 2.ceres solver安装
- 3.VINS_Fusion安装
- 4.KITTI数据集下载
- 5.跑通KITTI数据集
常规安装步骤详见官方
https://github.com/HKUST-Aerial-Robotics/VINS-Fusion
我用的ubuntu18.04
1.ROS安装
我写的博文记录了我的安装过程:https://blog.csdn.net/haner27/article/details/103955408
2.ceres solver安装
官方给的源是国外源,下载不了,这里是国内的下载链接
https://github.com/ceres-solver/ceres-solver.git
#14.04
sudo apt-get install liblapack-dev libsuitesparse-dev libcxsparse3.1.2 libgflags-dev libgoogle-glog-dev libeigen3-dev libgtest-dev
#18.04
sudo apt-get install liblapack-dev libsuitesparse-dev libcxsparse3 libgflags-dev libgoogle-glog-dev libeigen3-dev libgtest-dev
git clone https://github.com/ceres-solver/ceres-solver.git
cd ceres-solver/
mkdir build
cd build
cmake ..
make
sudo make install
记得安装依赖项,记得最后的make install
18.04报错“无法定位软件包 libcxsparse3.1.2”改成: libcxsparse3
(参考https://blog.csdn.net/weixin_42744670/article/details/82797586)
3.VINS_Fusion安装
创建ros空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make
source devel/setup.bash
安装VINS_Fusion
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Fusion.git
注:直接git获取VINS_Fusion,由于网络原因获取不成功,换了个电脑在github网站下载后,放到/catkin_ws/src文件夹中即可。
cd ~/catkin_ws
catkin_make
source ~/catkin_ws/devel/setup.bash
catkin_make的时候遇到报错: c++ internal compiler error program cc1plus
之前报错查找catkin_make的原因找了好久,以为是各种相关项版本的问题,结果是因为虚拟机分配的内存不足,采用博文提到的https://blog.csdn.net/fenquegong2126/article/details/80988452的方法,报错前用的4G内存,改成8G内存,跑通了。
[XXX] is neither a launch file in package [XXX] nor is [XXX] a launch file name报错信息解决方法
catkin_make
source devel/setup.bash
跑通实例:使用EuRoc数据集MH_02_easy.bag
roslaunch vins vins_rviz.launch
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_mono_imu_config.yaml
(optional) rosrun loop_fusion loop_fusion_node ~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_mono_imu_config.yaml
rosbag play YOUR_DATASET_FOLDER/MH_01_easy.bag
4.KITTI数据集下载
国外源打不开,感谢这个博主提供的国内源下载:https://blog.csdn.net/weixin_43599336/article/details/86533572
(刚开始可以下载,后来中断了,网页打不开,等一会再下就可以)
泡泡链接(百度网盘):https://www.sohu.com/a/219232053_715754
这两个链接都没能成功下载,最后找到了下面的链接:
https://www.dalipan.com/detail/40c8f99ba2120a493a148f8332094668
终于成功下载了。。
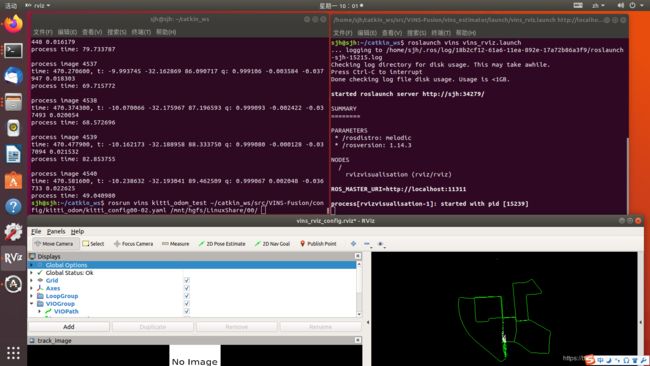
5.跑通KITTI数据集
1.KITTI Odometry (Stereo):使用sequences 00数据集
roslaunch vins vins_rviz.launch
(optional) rosrun loop_fusion loop_fusion_node ~/catkin_ws/src/VINS-Fusion/config/kitti_odom/kitti_config00-02.yaml
rosrun vins kitti_odom_test ~/catkin_ws/src/VINS-Fusion/config/kitti_odom/kitti_config00-02.yaml YOUR_DATASET_FOLDER/sequences/00/
2.KITTI GPS Fusion (Stereo + GPS):使用 2011_10_03_drive_0027_synced 数据集
roslaunch vins vins_rviz.launch
rosrun vins kitti_gps_test ~/catkin_ws/src/VINS-Fusion/config/kitti_raw/kitti_10_03_config.yaml YOUR_DATASET_FOLDER/2011_10_03_drive_0027_sync/
rosrun global_fusion global_fusion_node

注:开多个终端,跑上面的语句,如果rosrun的时候找不到包,重新运行一下:
source ~/catkin_ws/devel/setup.bash
问题:这里GPS数据与Stereo方向不一致?