opencv学习笔记(三十一)轮廓周围绘制圆形和矩形框
1.相关API
(1)approxPolyDP(InputArray curve, OutputArray approxCurve, double epsilon, bool closed),主要功能是把一个连续光滑曲线折线化,对图像轮廓点进行多边形拟合,减少轮廓点
curve:图像的轮廓点组成的点集
approxCurve:表示输出的多边形点集
epsilon:主要表示输出的精度,就是2个轮廓点之间最大距离数
closed:输出的多边形是否封闭
(2)矩形绘制API:cv::boundingRect(InputArray points)得到轮廓周围最小矩形左上交点坐标和右下角点坐标,绘制一个矩形。返回一个矩形RECT对象
cv::minAreaRect(InputArray points)得到一个旋转的矩形,返回旋转矩形,返回4个点。
(3)绘制圆:cv::minEnclosingCircle(InputArray points, Point2f& center,float& radius)
center:返回的所有圆心放进容器
radius:返回的所有圆的半径放进容器
(4)绘制椭圆:cv::fitEllipse(InputArray points)得到最小椭圆,返回一个椭圆对象
2.实现步骤
首先将图像变为二值图像
发现轮廓,找到图像轮廓
通过相关API在轮廓点上找到最小包含矩形和圆,旋转矩形与椭圆。
绘制
3.代码实现
#include "stdafx.h"
#include
#include
#include
using namespace std;
using namespace cv;
Mat src,srcGray ,dst;
char inputName[] = "input name";
char outputName[] = "output name";
int threshold_value = 100;
int threshold_max = 255;
RNG rng(12345);
void Contour_Demo(int, void *);
int main()
{
src = imread("D:/VS project/Image/HotAirBalloon.jpg");
if (src.empty())
{
cout << "找不到图像!" << endl;
return -1;
}
namedWindow(inputName, CV_WINDOW_AUTOSIZE);
namedWindow(outputName, CV_WINDOW_AUTOSIZE);
imshow(inputName, src);
cvtColor(src, srcGray, CV_BGR2GRAY);
blur(srcGray, srcGray, Size(3, 3), Point(-1, -1));
createTrackbar("Threshold Value", outputName, &threshold_value, threshold_max, Contour_Demo);
Contour_Demo(0, 0);
waitKey(0);
return 0;
}
void Contour_Demo(int, void *)
{
Mat binary_output;
vector> points;
vector hierachy;
//threshold(srcGray, binary_output, threshold_value, 255, THRESH_BINARY);
Canny(src, binary_output, threshold_value, threshold_value * 2, 3, false);
imshow("1", binary_output);
//找轮廓点
findContours(binary_output, points, hierachy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(0, 0));
vector> poly_points(points.size());//存放RDP处理后的轮廓点数
vectorpoly_rect(points.size());//存放Rect矩形对象
vector cc(points.size());//存放圆心
vector radius(points.size());//存放半径
vectormin_rect(points.size());
vectormin_ellipse(points.size());
for (size_t i = 0; i < points.size(); i++)
{
approxPolyDP(points[i], poly_points[i], 3, true);
poly_rect[i] = boundingRect(poly_points[i]);
minEnclosingCircle(poly_points[i], cc[i], radius[i]);//调用API存放圆心,半径
min_rect[i] = minAreaRect(poly_points[i]);//返回4个点
if (poly_points[i].size()>5)
{
min_ellipse[i] = fitEllipse(poly_points[i]);
}
}
//绘制
src.copyTo(dst);
for (size_t i = 0; i < points.size(); i++)
{
Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
rectangle(dst, poly_rect[i], color, 2, 8);
circle(dst, cc[i], radius[i], color, 2, 8);
ellipse(dst, min_ellipse[i], color, 2, 8);
//旋转矩形
Point2f rect_point[4];
min_rect[i].points(rect_point);
for (size_t i = 0; i < 4; i++)
{
line(dst, rect_point[i], rect_point[(i + 1) % 4], color, 2, 8);
}
}
imshow(outputName, dst);
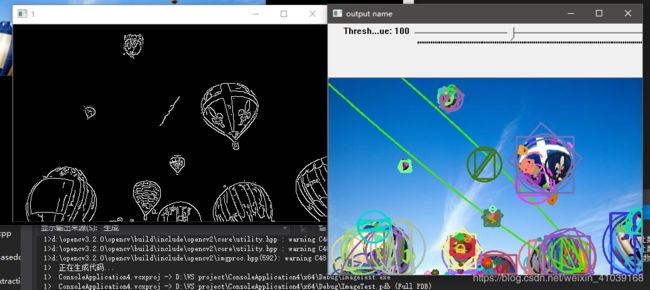
} 4.运行结果