px4源码学习六--uORB模块研究
UORB模块研读
uORB函数解析:
uORB模块(Micro Object Request Broker,微对象请求代理器)
uORB是Pixhawk系统中关键的一个模块,肩负了数据传输任务。所有传感器,数据传输任务,GPS,PPM信号从芯片获取后通过uORB进行传输,到各个模块计算处理。(可以理解为数据中心仓库)
uORB是跨进程的IPC通信模块。实际多个进程打开同一设备文件,通过此文件节点进行数据交互和共享。
进程间通过命名(总线)交换消息成为topic
一个topic包含一种消息类型/数据类型。
每个进程可以订阅/发布topic,一个进程可以订阅多个主题,但一条总线始终只能有一条消息。
公告topic
extern int orb_advertise(const struct orb_metadata *meta,const void *data)
meta:uORB元对象,可以看topic的ID,通过ORB_ID赋值。
data:指向一个被初始化,发布者要发布的数据存储变量指针。
发布更新
extern int orb_publish(const struct orb_metadata *meta, int handle, const void *data)
handle:orb_advertise函数返回的句柄
data:指向发布数据的制作
订阅topic
要求的满足条件:
- 调用ORB_DEFINE()或ORB_DEFINE_OPTIONAL()宏(在订阅头文件中包含他们)
- 发布到主题的数据结构定义
extern int orb_subscribe(const struct orb_metadata *meta)
取消订阅
extern int orb_unsubscribe(int handle)
拷贝数据
订阅者不能引用从ORB中存储数据或其他订阅共享的数据,只能拷贝到临界缓冲区
extern int orb_copy(const struct orb_metadata *meta, int handle, void *buffer)
检查更新
extern int orb_check(int handle, bool *updataed)
发布时间戳
extern int orb_stat(int handle,uint64_t *time)
Note:
- 必须要先orb_advertise()+orb_subscribe()后,才能使用orb_copy()
- 所有主题在Firmware/Build_px4fmu-v2_default/Src_Modules/uORB/Topics
- 也可以到Firmware/Msg下找到
uORB原理解析:
实现方式:
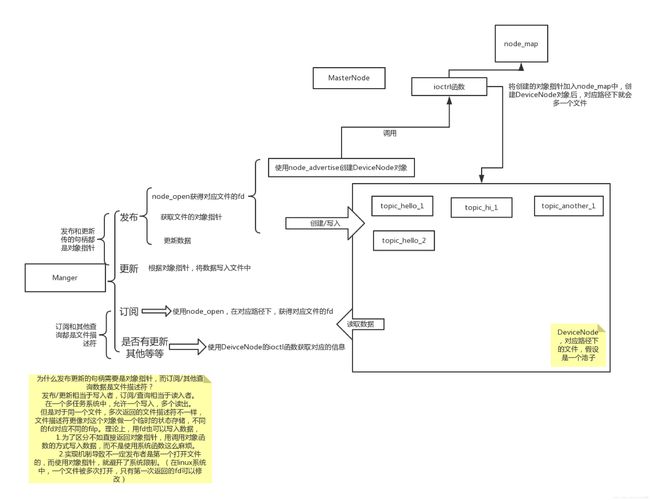
- 首先模块入口是uORBMain.cpp,这里会创建唯一的MasterNode实例,负责内部的设备节点的控制
- MasterNode简洁:继承自CDev,是一个字符设备,linux中设备都是文件,所以会在对应路径下生成文件,主要对Cdev的ioctl函数进行多态实现,类内部维护一个Nodemap的数据结构(后面有详细简绍),所有的DeviceNode都会加入其中管理。
- 当外部调用uORB的方法时候,实际间接调用了uORB::Manger类的方法,也可以理解做Manger是外部函数的管理入口,MasterNode是内部节点的管理器。
- 外部函数调用uORB时候都会通过uORB::Manger::get_instance()这个函数获取Manger的实例指针。这个函数是静态函数,根据判断命名空间中_Instance指针是否为空,确保全nameespace中只有这么一个Manger实例。
- 实际节点,DeviceNode,继承自CDev,每一个字符设备都会生成对应的文件。这个类重载了open,close,read,wirte,ioctl,还有其他一些函数。
- 当外部调用orb_advertise时,Manger会做如下的事情:
- 以发布者的身份调用node_open函数,最后返回对应文件的文件描述符fd。先确认一下是否这个主题对应实例的序号已经被发布过,如果是,会重新发布一下,否则(对应文件不存在,也就是这个主题对应ID的DeviceNode不存在),会调用node_advertise函数进行DeviceNode实例的创建。
- (调用node_open函数)
- 通过fd调用ioctl函数,返回DeiceNode对象的指针。
- 发布初始化的数据
- 当外部调用orb_publish时
- 根据传入的DeviceNode的指针,调用这个类的静态的发布数据的方法。就是将数据写入DeviceNode对象的属性中。
- 当外部调用orb_Subsctibe时,
- 使用Manger类的node_open函数,返回对应主题对应实例的文件描述符,其他信息都可以通过调用被DeviceNode多态实现过的ioctl函数获得。
- 取消订阅就将文件描述符关闭就可以了。
uORB
这个文件中所有的方法的实现方式都是调用ORB::Manger的方法,只是一个扩展接口的包装文件
因为这个没有在任何命名空间或者类中,这里将具体的ORB::Manger操作封装,使得其他类可以调用
orb_advertise(*meta, *data) orb_advert_t
参数列表含义:主题名称,初始数据
作为发布者做广播,如果正常,返回一个可以用来发布这个主题的句柄
orb_advertise(*meta, *data, *instance, priority) orb_advert_t
参数列表含义:主题名称,初始数据,实例ID的指针,实例优先级
一个主题下可以有多个实例,每个实例根据handle区分,最多5个
orb_pubshlist_auto(*meta, *handle, *data, *instance, priority) int
参数列表含义:同上
根据handle是否有效发布数据
orb_publish(*meta, handle, *data) int
参数列表含义:主题名称,主题的实例句柄,发布的数据
数据发布是原子操作,任何等待更新的订阅者都会被通知。其他没有等待的可以使用orb_check/orb_stat函数检查更新
orb_subscribe(*meta) int
参数列表含义: 主题名称
返回文件描述符,可以使用poll函数等待主题更新,就像使用topic_read/orb_check/orb_stat一样
即使这个主题没有发布订阅也可能成功,这种情况下,poll,复制它的值什么的操作都会失败,直到这个主题被发布未知。
如果系统不知道这样一个主题,那么会订阅失败
orb_subscribe_muti(*meta, instance) int
参数列表含义: 主题名称, 实例ID
orb_unsubscribe(handle) int
参数列表含义:实例句柄
orb_copy(*meta, handle, *buffer) int
参数列表含义:主题名称,实例句柄,缓冲区
这是唯一个可以重置内部主题是否更新标志的函数。一旦使用poll或者orb_check返回可用更新,必须使用这个方法更新参数
orb_check(handle, *updated) int
参数列表含义:实例的句柄,是否被更新的标志
检查在上次orb_copy后这个主题是否被重新发布过
更新以每个句柄为基础进行跟踪;
这个调用将一直返回true直到使用相同的句柄调用orb_copy。
由于stat和copy之间的竞争窗口可能导致错过更新,所以此接口应优先于调用orb_stat。
orb_stat(handle, *time) int
返回上一次更新主题的时间
orb_exists(*meta, instance) int
检查主题是否存在
orb_group_count(*meta) int
返回主题的实例数量
orb_priority(handle, *priority) int
返回句柄的优先级
orb_set_interval(handle, interval) int
设置最小的更新间隙
uORBCommon
ORBSet
- insert(*node_node) void
- find(*node_name) bool
- erase(*node_name) bool
- unlinkNext(Node*) void
实现方式与ORBMap一毛一样,唯一的区别就是这个类维护的队列中的node节点是只有节点名字,没有节点设备。
ORBMap
- insert(*node_name, *node) void
- find(*node_name) bool
- *get(*node) uORB::DeviceNode
- unlinkNext(*a) void
类的实现流程:(太简单了吧,过分)
类中维护一个队列,使用对象top,end俩个指针标识队列,
当有新的数据结点,加入到end后面,查找、获取是从头到尾顺序查找队列,使用strcmp()比较node_name
uORBDevices_nuttx
namespace uORB
{
class DeviceNode; //具体的节点
class DeviceMaster; //节点管理
}
DeviceNode
继承device::CDev(一切字符设备的基类)
DeviceNode(*meta, *name, *path, priority)
open(struct file *filp) int virtual
设备节点打开:算是虚拟的设备文件虽然继承与CDev类
根据文件信息,读取权限:(filp记录了这次打开文件的信息,比如权限,PID等数据)
如果文件写入权限,认为是发布者,设备节点属性发布者设为当前PID,使用CDev::open打开(但实际这个类也没干什么,可以忽略这一句),
如果是读取权限,认为是订阅者,申请SubscriberData给filp->f_priv,记录这个订阅对象fd所私有的数据,并且告诉对象属性又一个订阅者订阅了你
close(*filp) int virtual
设备节点关闭:
如果是发布者调用的关闭,将属性发布者置为0
如果是订阅者调用,获取filp中的SubscriberData,从调用列表中删除,移除内部调用者
read(*filp, *buffer, buflen) ssize_t virtual
将类中数据_data读入到buffer中
write(*filp, *buffer, buflen) ssize_t virtual
将buffer的数据读入到类的_data属性中
ioctl(*filp, cmd, arg) int virtual
根据cmd的值调整arg的类型,输出对应数据属性
publish(*meta, handle, *data) ssize_t static
这是静态函数,所有实例公用一个
根据传入的句柄(即DeviceNode的指针),将data的数据写入类的对象属性_data中
//以下3个函数应该是设计远程调用IChannel接口的,这里不做讨论,因为没看懂,也没有示例使用
process_add_subscription(rateInHz) int16_t
process_remove_subscription() int16_t
process_received_message(length, *data) int16_t
将接受的数据写入_data属性中
add_internal_subscriber() void
remove_internal_subscriber() void
is_published() bool
//protected:
poll_state(*filp) pollevent_t virtual
判断主题是否推送给订阅者,需要推送返回POLLIN,否则0
poll_notify_one(struct pollfd *fds,pollevent_t events )
对于fds来说,如果有更新,调用Cdev::poll_notify_one()函数进行更新
appears_updated(SubscriberData *sd) bool
根据sd的信息,判断是否有更新(发布者调用这个函数)
update_deferred() void
监控拉的需求
private:
struct SubscriberData {
unsigned generation; /**< last generation the subscriber has seen */
unsigned update_interval; /**< if nonzero minimum interval between updates */
struct hrt_call update_call; /**< deferred wakeup call if update_period is nonzero */
void *poll_priv; /**< saved copy of fds->f_priv while poll is active */
bool update_reported; /**< true if we have reported the update via poll/check */
int priority; /**< priority of publisher */
};
const struct orb_metadata *_meta; /**< object metadata information */
uint8_t *_data; /**< allocated object buffer */
hrt_abstime _last_update; /**< time the object was last updated */
volatile unsigned _generation; /**< object generation count */
pid_t _publisher; /**< if nonzero, current publisher */
const int _priority; /**< priority of topic */
bool _published; /**< has ever data been published */
DeviceMaster
继承device::CDev,管理设备节点的类
DeviceMaster(Flavor f)
*GetDeviceNode(*node_name) uORB::DeviceNode
ioctl(*filp, cmd,arg ) int virtual
private:
Flavor _flavor; //是PUBSUB还是OBJ
static ORBMap _node_map; //所有的DeviceNode设备都在其中
uORBDevices_posix
nuttx是在px4在nuttx操作系统下运行的,这个应该是裸机运行的。
uORBManager
这个类管理着每一个UORB主题和节点,也实现了UORb的API
继承自IChannelRxHandler类,类中函数大多都在前面见过,我只大概描述一下实现,如果有必要的话
get_instance() Manager* static
获取生成的uORBManager实例,静态的,单个进程中只生成一个实例
orb_advertise(*meta,*data) orb_advert_t
orb_advertise_multi(*meta, *data, *instance, priority) orb_advert_t
根据主题和实例编号获取文件描述符,根据文件描述符获取当前发布者的指针并返回发布者的指针
orb_publish(*meta, handle, *data) int
发布数据,返回成功与否
实现:
调用DevicNode的publish方法,DeviceNode::publish是静态方法,调用handle->write()函数(write会使属性_generation++,标记数据版本的),将数据写入文件中
orb_subscribe(*meta) int
orb_subscribe_multi(*meta, instance) int
订阅的原理就是打开以只读打开文件,返回fd
(一个文件可以被打开多次,返回的fd都不一样,fd对应这file *filp这个指针(也就是你在DeivceNode类中参数filp一样,这个指针的结构体参数比较全),所以可以打开一次,有多个备份的filp)
orb_unsubscribe(handle) int
orb_copy(*meta, handle, buffer) int
从handle中读取相应长度的数据到buffer中
orb_check(handle, *updated) int
使用ioctl方法(ioctrl方法有DeviceNode类实现)
这个检查的办法是对比filp中维护的SubscriberData数据和对象中属性generation是否一致,虽然filp有多个,但是文件(或者说DeviceNode对象只有一个),所以可以进行判断。(更新版本是在写入时候generation++)
orb_stat(handle, *time) int
使用ioctl方法
orb_exists(*meta, instance) int
主题的对应实例是否有
根据参数生成路径,然后试图打开对应文件
orb_priority(handle, *priority) int
使用ioctl方法
orb_set_interval(handle, interval) int
使用ioctl方法
set_uorb_communicator(*comm_channel) void
get_uorb_communicator() IChannel*
is_remote_subscriber_present(*messageName) bool
private:
node_advertise(*meta, *instance, priority) int
通过调用控制设备MasterNode的ioctl函数(被重载过),让控制文件去创建对应的DeviceNode对象(有了对象,对应路径下就有了文件)
node_open(Flavor, *meta, *data, advertiser, *instance, priority) int
根据订阅发布的属性打开对应的设备文件,返回文件描述符
这个函数让你屏蔽是否存在这样的设备文件,根据你的需求去解决。
如果你是订阅者,存在,直接返回。不存在,那就创建一个,方法同下。
如果你是发布者,存在,关闭fd。重新打开一次,(这时node_advertise调用将自动进入下一个空闲条目)不存在,调用node_advertise发布创建一个DeviceNode对象(有了对象自然会有文件)
实现:
判断输入的逻辑合法性
根据订阅者还是发布者,选择对应读取权限打开文件
如果是发布者&&打开成功,说明这个文件存在
关闭文件重新调用node_advertise发布再打开文件
返回文件描述符fd
process_add_subscription(*messageName, msgRate) int16_t
处理订阅的回调函数,Manger类实现的
实现逻辑:
将主体加入订阅主题的集合中
根据对应信息获取路径,再从设备管理器DeviceMaster获取对应的设备节点
具体设备节点处理订阅频率
process_remove_subscription(*messageName) int16_t
处理移除订阅的回调函数,Manger类实现
实现逻辑:
将主题移除主题集合
获取对应的设备节点
具体设备节点处理移除事件
process_received_message(*message, length, *data) int16_t
处理接受信息的回调函数,Manger类实现
实现逻辑:
获取对应的设备节点
具体的设备节点处理接受的信息
static Manager *_Instance; //全局唯一的管理器
// the communicator channel instance.
uORBCommunicator::IChannel *_comm_channel;
ORBSet _remote_subscriber_topics;
uORBUtils
工具类Utils中只有2个同名的静态函数
int node_mkpath(char* buf, Flavor f, const struct orb_metadata *meta, int *instance)
int node_mkpath(char* buf, Flavor f, const char* orbMsgName)
参数含义:
buf:输出路径的字符串
f: 标志,是发布订阅还是作为参数(PUBSUB/PARAM)
meta: 通过meta->o_name = orbMsgName
instance: 如果是多个实例,对应相应的,否则默认为0
生成路径为/(obj?param)/orbMsgName/instance ,应该是节点设备的文件路径
uORBCommunicator
namespace uORBCommunicator
{
//俩个类都为纯虚类,可以认为java中的接口类
class IChannel; // 可以理解为这个是客户端
class IChannelRxHandler; //这个是服务器端
}
IChannel
启用远程订阅的接口,接口的实现类需要管理通信信道,快速RPC/TCP/IP
add_subscription(*messageName, msgRateInHz) int16_t
参数列表含义:主题名称(全局唯一),最大消息更新速率
通知有兴趣的远程实体订阅消息的接口
remove_subscription(*messageName) int16_t
通知远程实体移除订阅的接口
register_handler(IChannelRxHandler *handler) int16_t
注册消息句柄
send_message(*messageName, length, *data) int16_t
通过通讯链接发送数据
IChannelRxHandler
通过通信链路回调的类
process_add_subscription(*messageName, msgRateInHz) int16_t
处理从远程接受添加的接口函数
process_remove_subscription(*messageName) int16_t
处理远程移除订阅的接口
process_received_message(*messageName, length, *data) int16_t
处理远程发送数据的类