Ceph BlueStore Cache
文章目录
- Introduction
- Cache Init
- Cnode
- Onode
- Buffer
- Trim
- Config
- Summary
Introduction
BlueStore自己管理裸设备,没有文件系统,操作系统的page cache利用不上,需要自己管理缓存,包括元数据的缓存和object data的缓存,缓存系统的性能直接影响整个BlueStore的性能。
缓存的主要对象包括:
1、pg对应的Collection,即Cnode
2、object的元信息Onode
3、object data对应的Buffer
全部缓存
osd负责的pg个数比较少,在osd启动的时候,就会将所有pg对应的Collection加载到内存
部分缓存
对于Onode,单个osd对应的object成千上万,条件允许可以尽最大可能将object的元信息缓存在内存中
部分缓存场景存在缓存淘汰策略
对于Onode此类缓存采用LRU策略
对于object的数据Buffer,显然是不可能全部缓存住的,尽可能缓存热点object,所以此类缓存采用的2Q算法
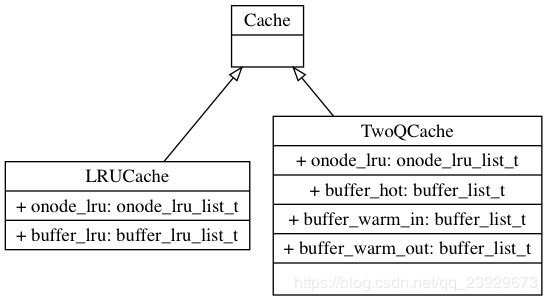
LRU和2Q的主要区别:
LRU仅仅采用单个链表,而2Q采用多个链表。实现的时候,抽象出Cache类,然后提供LRUCache和TwoQCache两种实现,两种实现都支持Onode和Buffer的缓存,LRUCache中Onode和Buffer各采用一个链表,淘汰用LRU策略,TwoQCache中,Onode仍然采用一个链表,用LRU策略,而buffer采用三个链表,用2Q策略。
Cache的实现本身比较简单,本质上就是将数据放入链表或根据某种策略放入多个链表,重点关注怎么使用以及缓存空间的参数调优。
Cache Init
BlueStore::BlueStore(CephContext *cct, const string& path)
: ObjectStore(cct, path),
......
{
......
set_cache_shards(1); // 初始化cache
}
void BlueStore::set_cache_shards(unsigned num)
{
size_t old = cache_shards.size();
assert(num >= old);
cache_shards.resize(num);
for (unsigned i = old; i < num; ++i) {
cache_shards[i] = Cache::create(cct, cct->_conf->bluestore_cache_type, logger); // 默认采用2q
}
}
BlueStore::Cache *BlueStore::Cache::create(CephContext* cct, string type, PerfCounters *logger)
{
Cache *c = nullptr;
if (type == "lru")
c = new LRUCache(cct); // LRU
else if (type == "2q")
c = new TwoQCache(cct); // 2q
......
}
看上去初始化流程比较简单,而且把分片的shard写死为1?实际上,在osd初始化的时候,会根据参数调整shard的值,隐藏的比较深,稍不注意就疏忽了:
int OSD::init()
{
......
store->set_cache_shards(get_num_op_shards());
......
}
int OSD::get_num_op_shards()
{
if (cct->_conf->osd_op_num_shards)
return cct->_conf->osd_op_num_shards; // 默认0
if (store_is_rotational)
return cct->_conf->osd_op_num_shards_hdd; // 默认5
else
return cct->_conf->osd_op_num_shards_ssd; // 默认8
}
Cnode
cnode指的是pg对应collection的磁盘结构:
struct bluestore_cnode_t {
uint32_t bits; // 只有一个bit表示pg的有效位,在stable_mod的时候用
};
在创建pg的时候,会将pg的元信息存在kv中:
int BlueStore::_create_collection(TransContext *txc, const coll_t &cid, unsigned bits, CollectionRef *c)
{
c->reset(new Collectioni(this, cache_shards[cid.hash_to_shard(cache_shards.size())], cid)); // 给pg指定一个cache
(*c)->cnode.bits = bits;
coll_map[cid] = *c; // collection的map
::encode((*c)->cnode, bl);
txc->t->set(PREFIX_COLL, stringify(cid), bl); // 将pg信息持久化
}
在osd上电的时候,会创建collection,并从k/v加载所有collection信息,同时会指定一个cache给pg,参见函数_open_collections:
int BlueStore::_open_collections(int *errors)
{
KeyValueDB::Iterator it = db->get_iterator(PREFIX_COLL);
for (it->upper_bound(string()); it->valid(); it->next()) { // 遍历pg对应的collection k/v元信息
coll_t cid;
if (cid.parse(it->key())) {
CollectionRef c(new Collection(this, cache_shards[cid.hash_to_shard(cache_shards.size())], cid)); // 创建collection
bufferlist bl = it->value(); // 获取对应的value
bufferlist::iterator p = bl.begin();
try {
::decode(c->cnode, p); // 解码
} catch (buffer::error& e) {
return -EIO;
}
coll_map[cid] = c; // 更新collection map
}
}
return 0;
}
由上面可知,cache shard的分片数是固定的,一般也不太大,所以多个pg可能会共用同一个cache。如果内存较充足,缓存的数据特别多,分片的大小可以适当调大,避免cache内部的链表太长。
Onode
onode是object的元信息,读写或其他操作的时候,都需要onode信息,而object属于某个pg(collection)的,内部通过一个map记录目前缓存的对象:
struct Collection : public CollectionImpl {
OnodeSpace onode_map; // objcet name -> onode
......
};
struct OnodeSpace {
private:
mempool::bluestore_cache_other::unordered_map onode_map; // pg内部的object
};
几乎所有关于object的操作入口函数,实现的时候都会首先读取onode信息:
BlueStore::OnodeRef BlueStore::Collection::get_onode(const ghobject_t& oid, bool create)
{
......
OnodeRef o = onode_map.lookup(oid); // 查找map
if (o)
return o;
......
int r = store->db->get(PREFIX_OBJ, key.c_str(), key.size(), &v); // 从k/v系统加载元信息
......
return onode_map.add(oid, o); // 加入缓存
}
BlueStore::OnodeRef BlueStore::OnodeSpace::add(const ghobject_t& oid, OnodeRef o)
{
......
onode_map[oid] = o; // 加入map
cache->_add_onode(o, 1); // 加入缓存系统
}
Buffer
object的数据可能对应很多buffer,通过BufferSpace统一管理:
struct BufferSpace {
mempool::bluestore_cache_other::map> buffer_map; // 所有的buffer
state_list_t writing; // 正在写的buffer
......
};
当数据写完成后,通过标志决定是否加入缓存系统:
void BlueStore::BufferSpace::finish_write(Cache* cache, uint64_t seq)
{
std::lock_guard l(cache->lock);
auto i = writing.begin();
while (i != writing.end()) {
......
if (b->flags & Buffer::FLAG_NOCACHE) { // 直接删除
writing.erase(i++);
buffer_map.erase(b->offset);
} else {
writing.erase(i++);
......
cache->_add_buffer(b, 1, nullptr); // 加入cache
}
}
......
}
同理,当读取完成后,也会考虑加入缓存:
int BlueStore::_do_read(
Collection *c,
OnodeRef o,
uint64_t offset,
size_t length,
bufferlist& bl,
uint32_t op_flags)
{
......
// 设置是否缓存
bool buffered = false;
if (op_flags & CEPH_OSD_OP_FLAG_FADVISE_WILLNEED) {
buffered = true;
} else if (cct->_conf->bluestore_default_buffered_read &&
(op_flags & (CEPH_OSD_OP_FLAG_FADVISE_DONTNEED | CEPH_OSD_OP_FLAG_FADVISE_NOCACHE)) == 0) {
buffered = true;
}
......
if (buffered) {
bptr->shared_blob->bc.did_read(bptr->shared_blob->get_cache(), 0, raw_bl);
}
......
}
void did_read(Cache* cache, uint32_t offset, bufferlist& bl) {
std::lock_guard l(cache->lock);
Buffer *b = new Buffer(this, Buffer::STATE_CLEAN, 0, offset, bl);
b->cache_private = _discard(cache, offset, bl.length());
_add_buffer(cache, b, 1, nullptr); // 加入cache
}
Trim
BlueStore很多元信息对象,都是用内存池管理的,Onode和Buffer也不例外,后台由线程监控内存的使用情况,超过内存规定的限制就做trim:
void *BlueStore::MempoolThread::entry()
{
while (!stop) {
// 通过参数计算出trim的目标
......
for (auto i : store->cache_shards) {
i->trim(shard_target, store->cache_meta_ratio, store->cache_data_ratio, bytes_per_onode); // 执行trim
}
......
wait += store->cct->_conf->bluestore_cache_trim_interval;
cond.WaitInterval(lock, wait); // 定时唤醒执行trim
}
}
Config
// BlueStore中cache_shards的分片大小依赖的参数
osd_op_num_shards // 默认为0
osd_op_num_shards_hdd // 默认为5
osd_op_num_shards_ssd // 默认为8
bluestore_cache_trim_interval // cache trim的间隔时间,默认为0.2,可适当调大
bluestore_cache_trim_max_skip_pinned // trim cache的时候,如果遇见item是pin的,计数+1,计数超过此值后,停止做trim。默认为64
bluestore_cache_type // 默认为2q
bluestore_2q_cache_kin_ratio // in链表的占比,默认为0.5
bluestore_2q_cache_kout_ratio // out链表的占比,默认为0.5
// 缓存空间大小,需要根据物理内存大小以及osd的个数设置合理值
bluestore_cache_size // 默认为0
bluestore_cache_size_hdd // 默认为1GB
bluestore_cache_size_ssd // 默认为3G
bluestore_cache_meta_ratio // metadata占用缓存的比率,默认为0.01
bluestore_cache_kv_ratio // rocksdb database cache占用缓存的比率,默认为0.99
bluestore_cache_kv_max // rocksdb database占用缓存的上限,默认为512MB
Summary
•osd启动的时候,提供参数初始化BlueStore的cache分片大小,供后续pg对应的collection使用
•osd从磁盘读取collection信息,将pg对应的collection全部加载到内存,并分配一个负责缓存的cache给collection
•执行对象操作的时候,会首先读取Onode元信息并将其加入缓存管理
•写入对象的时候,会根据标志,将对象数据的Buffer加入缓存管理
•Onode/Buffer等对象统一用内存池分配,后台线程定期检查内存使用情况,并将超出的部分trim掉