VSLAM之单目相机选型
做视觉SLAM难免要面临如何选择相机,因此有必要了解下与相机相关的参数,泡泡机器人曾经整理过论文中常用的相机(推荐产品列表),亦可以参考之.
2018年10月20更新:
1)测试了一款全局快门相机:UI-1221LE-C-HQ
2)做了这款相机与XSENS IMU/轮式里程计的硬件时间戳同步,时间戳同步代码已上传至github,
- ueye相机驱动地址:https://github.com/LeatherWang/ueye_cam/tree/extrigger_software
- xens驱动地址:https://github.com/LeatherWang/ethzasl_xsens_driver
- 轮式里程计上位机代码地址:https://github.com/LeatherWang/slam_car
3)ueye的这款相机支持软件外部触发,但在ROS1.0下测试效果不理想,有时间在ROS2.0下进行测试
文章目录
- 1、相机选型时出现的参数的含义
- 2、M12镜头参数计算
- 3、镜头分类
- 4、凸透镜成像原理
- 4.1 焦距
- 4.2 凸透镜成像规律
- 4.3 定焦镜头
- 5、相机曝光
- 5.1 光圈
- 5.2 快门与光圈
- 5.3 自动曝光
- 6、景深与焦深
- 6.1 景深
- 6.2 焦深
- 7、视场角计算
- 8、红外镜头
1、相机选型时出现的参数的含义
1)像元尺寸(Pixel size)
像元尺寸指芯片像元阵列上每个像元的实际物理尺寸,通常的尺寸包括14um,10um, 9um , 7um , 6.45um ,3.75um 等。像元尺寸从某种程度上反映了芯片的对光的响应能力,像元尺寸越大,能够接收到的光子数量越多,在同样的光照条件和曝光时间内产生的电荷数量越多。对于弱光成像而言,像元尺寸是芯片灵敏度的一种表征。
2)图像传感器格式(Optical format)
参考:https://zh.wikipedia.org/wiki/%E6%A8%99%E6%BA%96%E9%8F%A1%E9%A0%AD
图像传感器对角线长度为摄像管直径(即,传感器类型,如1/3")的2/3
3)活动成像区域的大小(active imager size)
为了计算摄像机的视角,应该使用传感器的活动区域的大小。传感器的活动区域意味着传感器的区域,在该区域上,在给定的摄像机模式下形成图像。活动区域可以小于图像传感器,并且活动区域可以在同一相机的不同操作模式下有所不同。有效面积大小取决于传感器的纵横比和摄像机输出图像的纵横比。活动区域大小可以取决于相机给定模式下的像素数目。有效面积大小和透镜焦距决定了视角。
2、M12镜头参数计算
参考:https://blog.csdn.net/jiaozi07/article/details/42264679
比如我们看到一款镜头在一个镜头上标注了 “F1.2 8mm IR CCTV 1/3 LENS 3MP”,这里8mm表示焦距,F1.2表示光圈值, F值=镜头的焦距/镜头光圈的直径,光圈的直径由镜头光圈的叶片来控制。
例如50mm的镜头,F1.2的时候,光圈的直径为41.7mm, F1.4 的时候为 35.7mm,F1.6的时候为31.2mm。F值越大,镜头光圈的直径越小,照片的景深越大。1/3表示对应sensor的尺寸。3MP表示300万像素。
3、镜头分类
参考:https://zhuanlan.zhihu.com/p/29098395
镜头按焦距分,可以划分为:标准镜头、广角镜头、鱼眼镜头、长焦距镜头、反射式望远镜头、微距镜头。
1)标准镜头,指焦距长度接近或等于底片/传感器对角线长度的镜头。其视角约50度,也是人单眼在头和眼不转动的情况下所能看到的视角。在诸如取景范围、透视关系等方面,标准镜头都与人眼观看的效果类同,显得特别亲切、自然。
2)广角镜头,指焦距短于、视角大于标准镜头的镜头。视角大于90度的镜头称为“超广角镜头”。
3)鱼眼镜头,一种极端的超广角镜头,视角在180度左右的镜头就可称为“鱼眼镜头”。
4)长焦距镜头,适于拍摄距离远的景物,景深小容易使背景模糊主体突出,但体积笨重且对动态主体对焦不易。35mm 相机长焦距镜头通常分为三级,135mm以下称中焦距,135-500mm称长焦距,500mm以上称超长焦距。长焦镜头的主要特点为:
- 景深小,容易获得主体清晰,背景虚化的画面效果;
- 视角小,能够获得远处主体较大的画面且不干扰被摄对象;
- 压缩了画面透视的纵身感,拉近了前后景的距离;
- 影像畸变较小。
4、凸透镜成像原理
4.1 焦距
焦距,是光学系统中衡量光的聚集或发散的度量方式,指平行光从透镜的光心到光聚集之焦点的距离。
当对同一距离远的同一个被摄目标拍摄时,镜头焦距长的所成的象大(这也是长焦镜头能够看清远处物体的原因),镜头焦距短的所成的象小。
焦距与视场角成反比,即焦距越大,视场角越小,反之视场角越大。
4.2 凸透镜成像规律
f f f 是焦距, u u u 为物距, v v v 为像距,使用三角形相似即可证明
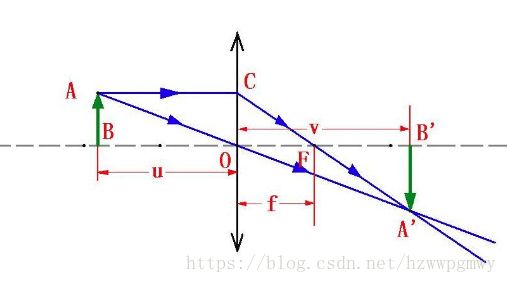
成像公式为:
1 f = 1 u + 1 v \frac1f=\frac1u+\frac1v f1=u1+v1
按照此规律可以得出成像是清晰的,否则是模糊的,所以一般用凸透镜做照相机的镜头时,它成的最清晰的像不会正好落在焦点上,或者说,最清晰的像到光心的距离(像距)一般不等于焦距,而是略大于焦距。具体的距离与被照的物体与镜头的距离(物距)有关,物距越大,像距越小,(但实际上总是大于焦距)。
4.3 定焦镜头
广角定焦镜头一般都比变焦镜头的广角段成像好,这是镜头的设计所决定的,变焦镜头由于要考虑所有焦距段都有相对好的成像,就要牺牲局部的利益让整体有一个相对好的表现。但定焦镜头不用考虑这些。
5、相机曝光
5.1 光圈
光圈是一个用来控制光线透过镜头,进入机身内感光面的光量的装置,它通常是在镜头内。常用光圈F值表示光圈的大小
光 圈 F 值 = 镜 头 的 焦 距 镜 头 有 效 孔 径 光圈F值=\frac{镜头的焦距}{镜头有效孔径} 光圈F值=镜头有效孔径镜头的焦距
光圈 F 值越小,通光孔径越大,在同一单位时间内的进光量便越多,画面越亮。
5.2 快门与光圈
曝光是用于表示照片整体亮度的术语。照片的亮度由图像感应器所接收到的光的总量决定,而光圈和快门就起到了调整光量的“调节阀” 的作用。快门采用速度表示,相当于光线之门打开的时间,而光圈则表示门打开的大小。
单从得到照片亮度的角度来看,不管是通过打开光圈提高快门速度,还是通过缩小光圈降低快门速度,所得到的照片亮度均相同。
5.3 自动曝光
在程序自动曝光方式中,照相机能根据测光系统所测得的被摄画面的曝光值,按照厂家生产时所设定的快门及光圈曝光组合,自动地设定快门速度和光圈值。
6、景深与焦深
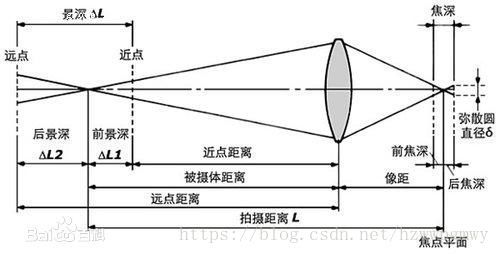
6.1 景深
景深是指在摄影机镜头或其他成像器前沿能够取得清晰图像的成像所测定的被摄物体前后距离范围。在聚焦完成后,在焦点前后的范围内都能形成清晰的像,这一前一后的距离范围,便叫做景深。
光圈、镜头、及拍摄物的距离是影响景深的重要因素:
1)光圈越大(光圈值F越小)景深越浅,光圈越小(光圈值F越大)景深越深;
2)镜头焦距越长景深越浅、反之景深越深;
3)主体越近,景深越浅,主体越远,景深越深。
6.2 焦深
焦深(depth of focus):在光学系统中所能允许的焦点偏移范围,当焦点偏移在此范围之内,所产生的模糊并不会影响到成像品质。焦深决定镜头的图像平面与传感器平面本身之间可容忍之翻转与倾斜量。
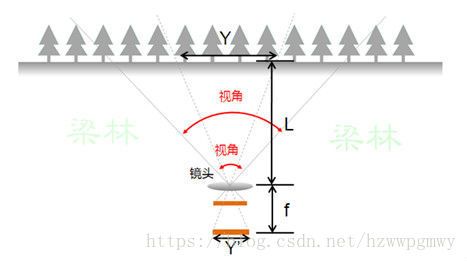
7、视场角计算
以光学仪器的镜头为顶点,以被测目标的物象可通过镜头的最大范围的两条边缘构成的夹角,称为视场角。
参考:https://zh.wikipedia.org/wiki/%E8%A6%96%E8%A7%92
对于直线投射影像,视角 (α)可以由被选择的大小(d),以及有效焦段(f)计算出来如下:
a = 2 ∗ a r c t a n ( d 2 f ) a=2*arctan(\frac{d}{2f}) a=2∗arctan(2fd)
焦距越长,视角越小,反之亦然
假设一个 35mm 相机,安装了一个焦距为 F = 50 mm 的镜头。35mm 相机的影像规格是 24mm(垂直)× 36mm(水平),对角线距离约为 43.3mm.
…
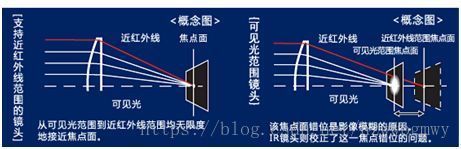
8、红外镜头
镜头上会标注“IR”字样,消除可见光和红外光的焦面偏移,使可见光区到红外光区都可以在同一个焦面位置成像,从而实现日夜监控。
红外滤光片 IR Filter
主要是过滤掉进入镜头的光线中的红外光,这是因为人眼看不到红外光,但是sensor却能感受到红外光,所以需要将光线中的红外光滤掉,以便图像更接近人眼看到的效果。
<完>
@leatherwang