Arduino学习笔记(12) -- MPU6050与卡尔曼滤波算法实践
01 简介:Why MPU6050?
MPU 6050等IMU传感器用于自平衡机器人,无人机,智能手机等。IMU传感器帮助我们在三维空间中获得连接到传感器的物体的位置。这些值通常是角度,以帮助我们确定其位置。它们用于检测智能手机的方向,或者用于Fitbit等可穿戴设备,它使用IMU传感器跟踪运动。
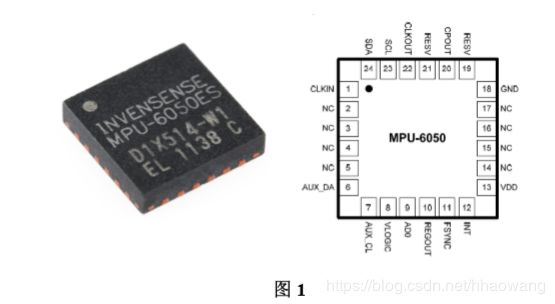
MPU6050 它是全球首例整合性 6 轴运动处理组件,俗称的六轴陀螺仪(x y z 三轴的倾斜角度和三轴方向的加速度)。它集成了陀螺仪和加速度计于一体的芯片,它极大程度上免除了独立使用的陀螺仪和加速度计在时间上的误差,而且减少了占用 PCB 板的空间。(图1 为实物图)
MPU6050具体参数:
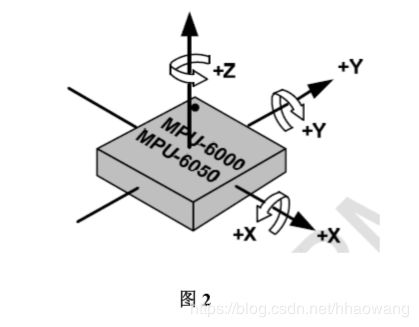
MPU-60X0 对陀螺仪和加速度计分别用了三个 16 位的 ADC,将其测量的模拟量转化为可输出的数字量。为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,陀螺仪可测范围为±250,±500,±1000,±2000°/秒(dps),加速度计可测范围为±2,±4,±8,±16g。 一个片上 1024 字节的 FIFO,有助于降低系统功耗。和所有设备寄存器之间的通信采用400kHz的I2C接口或1MHz的SPI接口(SPI 仅 MPU-6000 可用)。对于需要高速传输的应用,对寄存器的读取和中断可用 20MHz 的 SPI。另外,片上还内嵌了一个温度传感器和在工作环境下仅有±1%变动的振荡器。 芯片尺寸 4×4×0.9mm,采用 QFN 封装(无引线方形封装),可承受最大 10000g 的冲击,并有可编程的低通滤波器。 关于电源,MPU-60X0 可支持 VDD范围 2.5V±5%,3.0V±5%,或 3.3V±5%。另外 MPU-6050 还有一个 VLOGIC 引脚,用来为 I2C 输出提供逻辑电平。VLOGIC 电压可取 1.8±5%或者 VDD。(图 2 为 MPU6050 三轴示意图。)
MPU6050作为价格低廉、功能强大、开源的硬件,其广泛应用于通用场景的移动嵌入书开发,诸如四轴无人机,平衡车,机器人等作品, 以智能平衡小车为例,其融合了 Z 轴和 Y 轴夹角实现小车平衡。
电路原理图
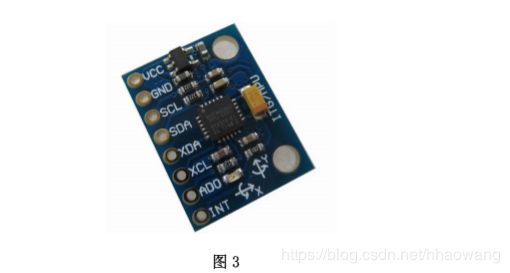
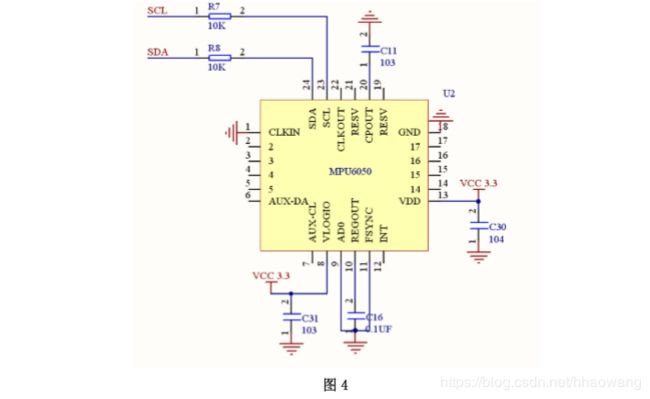
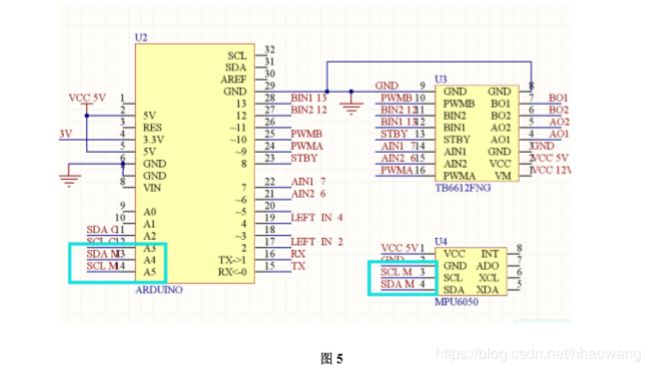
MPU6050 模块内部自带稳压电路,可兼容 3.3V/5V 的供电电压,采用先进的数字滤波技术,提高精度同时抑制了测量噪声。通讯方面,MPU6050 保留了 IIC 接口,高级用户能够采样底层测量数据。值得一提的是,芯片集成了 DMP (Digital Motion Processor)数字动态处理器(以后会用到,实现平衡小车姿体平衡)从陀螺仪、加速度计以及外接的传感器接收并处理数据,处理结果可以从 DMP 寄存器读出,或通过 FIFO(First In First Out) 缓冲。图4为模块的原理图,图5为Arduino连接原理图。
IMU工作原理
IMU传感器通常由两个或多个部件组成。按优先级列出它们,它们是加速度计,陀螺仪,磁力计和高度计。MPU 6050是6 DOF(自由度)或六轴IMU传感器,这意味着它提供六个值作为输出:来自加速度计的三个值和来自陀螺仪的三个值。MPU 6050是基于MEMS(微机电系统)技术的传感器。加速度计和陀螺仪都嵌入在单个芯片内。该芯片使用I2C(内部集成电路)I2C (inter-integrated circuit) 协议进行通信。
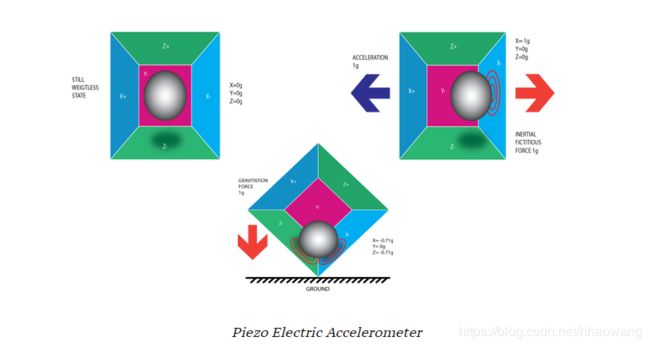
一个加速度计适用于压电效应原理。想象一个立方体盒子,里面有一个小球,如上图所示。这个盒子的墙壁是用压电晶体制成的。每当您倾斜盒子时,球都会因重力而沿倾斜方向移动。球碰撞的壁产生微小的压电电流。长方体中有三对相对的墙。每对对应于3D空间中的轴:X,Y和Z轴。根据压电壁产生的电流,我们可以确定倾斜方向及其大小。
连接到Arduino
MPU 6050通过I2C协议与Arduino通信。MPU 6050连接到Arduino,如下图所示。如果MPU 6050模块具有5V引脚,则可以将其连接到Arduino的5V引脚。如果没有,则必须将其连接到3.3V引脚。接下来,Arduino的GND连接到MPU 6050的GND。
Arduino MPU 6050连接图
我们将在这里运行的程序也利用了Arduino的中断引脚。将Arduino的数字引脚2(中断引脚0)连接到MPU 6050上标记为INT的引脚。
接下来,我们需要设置I2C线路。为此,将MPU 6050上标有SDA的引脚连接到Arduino的模拟引脚4(SDA),将MPU 6050上标记为SCL的引脚连接到Arduino的模拟引脚5(SCL)。至此,已完成了Arduino MPU 6050的接线。
- 要测试Arduino MPU 6050,首先要下载由Jeff Rowberg开发的MPU 6050的Arduino library- >>>>>here
- Arduino与6050之间的通信I2C (inter-integrated circuit) 协议进行通信,加载IIC通信协议库文件- >>>>>here.
02 卡尔曼滤波
滤波原理:见本人的另外一篇博客
读取MPU6050数据
代码:
#include "Wire.h"
#include "I2Cdev.h"
#include "MPU6050.h"
MPU6050 accelgyro;
unsigned long now, lastTime = 0;
float dt; //微分时间
int16_t ax, ay, az, gx, gy, gz; //加速度计陀螺仪原始数据
float aax=0, aay=0,aaz=0, agx=0, agy=0, agz=0; //角度变量
long axo = 0, ayo = 0, azo = 0; //加速度计偏移量
long gxo = 0, gyo = 0, gzo = 0; //陀螺仪偏移量
float pi = 3.1415926;
float AcceRatio = 16384.0; //加速度计比例系数
float GyroRatio = 131.0; //陀螺仪比例系数
uint8_t n_sample = 8; //加速度计滤波算法采样个数
float aaxs[8] = {0}, aays[8] = {0}, aazs[8] = {0}; //x,y轴采样队列
long aax_sum, aay_sum,aaz_sum; //x,y轴采样和
float a_x[10]={0}, a_y[10]={0},a_z[10]={0} ,g_x[10]={0} ,g_y[10]={0},g_z[10]={0}; //加速度计协方差计算队列
float Px=1, Rx, Kx, Sx, Vx, Qx; //x轴卡尔曼变量
float Py=1, Ry, Ky, Sy, Vy, Qy; //y轴卡尔曼变量
float Pz=1, Rz, Kz, Sz, Vz, Qz; //z轴卡尔曼变量
void setup()
{
Wire.begin();
Serial.begin(115200);
accelgyro.initialize(); //初始化
unsigned short times = 200; //采样次数
for(int i=0;i