EUCM鱼眼相机模型详解
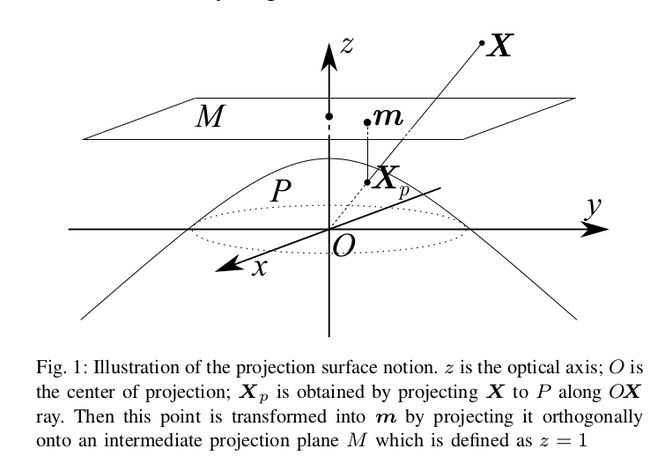
EUCM 模型即为extended unified camera model, 主要会涉及到几个坐标系,如下:
a. 世界坐标系: 真实世界坐标中的位置坐标,单位为m, 一般对应在表达为X;
b. 椭球面坐标系:是一个中转球面,与对应点的世界坐标相差一个scale的系数;也成为P平面, 对应表达为Xp
c. 图像坐标系:是椭球面上的点在z=1平面上的投影,也称为M平面,其x,y值与Xp一样,只是z值固定为1, 对应表达为m
d. 像素坐标系: 图片中点像素点坐标,左上角为(0,0), 由 m plane中的点经过内参矩阵K计算而来;对应表达为p(u,v)
模型图像为:
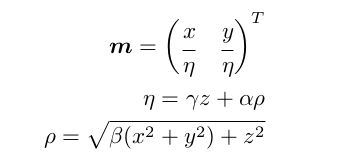
1. EUCM模型的projection公式( 从世界坐标 ---> 图像坐标系)
其中( x, y, z) 为点X 在世界坐标系下的坐标;alpha, beta算作是畸变系数;得到的m 坐标即为 点X 对应的在图像坐标系下的坐标;
2. 图像坐标系到像素坐标系
![]()
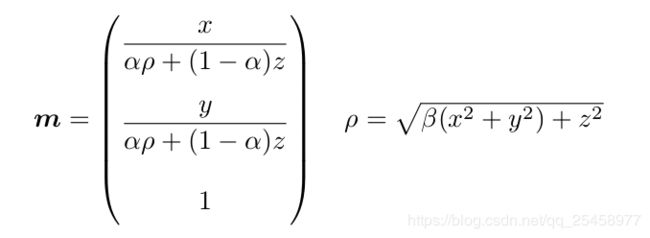
3. 世界坐标系---> 椭球面坐标系( ---> M平面图像坐标系)
![]()
该公式表明 从世界坐标X 到椭球面坐标Xp 其实就是经过![]() 函数的缩放而已, 然后再由椭球面P上垂直投影到M平面上
函数的缩放而已, 然后再由椭球面P上垂直投影到M平面上
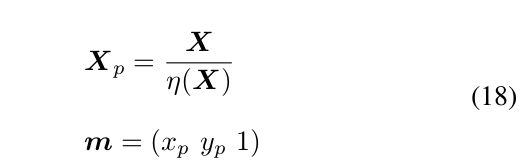
4. 反投影 --> 这里需要注意的是, 反投影只能从像素坐标系到椭球面坐标系,而不能转换到真实的世界坐标系;
其中 x,y M 平面的坐标, 同时,也是Xp的x, y坐标, 所以重点是这里z(x,y)的求解;
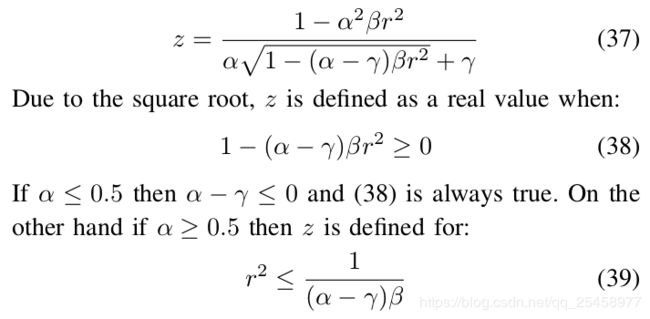
式37 是z的求解公式, 这里需要注意的是若想要z值有效, 则r2 必须满足式39, 这个其实就是鱼眼相机的有效成像半径;其中gamma = 1-alpha;
5. Z(x,y)的求解方法
在第三部分中z的求解方法其实是基于P平面上的点Xp 经过缩放函数![]() 后等于1, 即:
后等于1, 即:

假设Xp(x, y,z) 则 带入到第三部分![]() 的公式后有:
的公式后有:

![]()
对该公式求解即可得到式37 ;
6. 单应矩阵求解 , 求解单应矩阵进行3D reconstruction
假设有相机a 和 b,世界坐标中某点在相机a 和 b 下分别有 坐标![]() 和
和![]()
以及有 projection functions![]() 和
和 ![]() , 两个相机之间有R t 关系如下:
, 两个相机之间有R t 关系如下:

则推导可得:
 其中,
其中,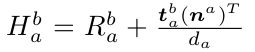
H为3x3矩阵, 可以由 4对处在P平面的匹配点计算得出
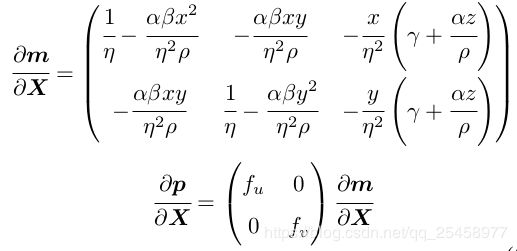
7. 雅克比矩阵:
首先说雅克比矩阵, 在slam14讲中有关于雅克比矩阵在BA优化时的公式, p164, 式7.41
e 关于扰动量的导数, 等于e关于P‘ 的导数 × P’ 关于扰动的导数;
因为第二项是固定的,P‘ 为世界坐标[X', Y',Z'], 所以只需要注意e关于P’ 求导即可;
其中e为从世界坐标系到图像坐标系的转换公式, 对于针孔相机模型而言, 为
u = fx*X'/Z' +cx, v=fy*Y'/Z' +cy ;
对EUCM模型为
u=mx*fx + cx , v=my*fx + cy ;
其中,
先求出m关P(x, y, z) 的导数, 再相乘, 最后结果为