Libra R-CNN论文解读及复现
一篇来自浙大、港中文、商汤的目标检测文章。
现在CV领域各种模型真的是满天飞,这篇Libra RCNN在不大量增加模型复杂度的前提下还可以有效涨分,还是给人眼前一亮的。
论文链接

总览
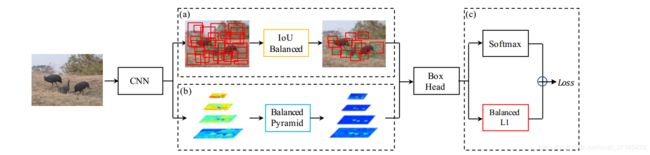
论文主要讲述了三个贡献:
- IoU-balanced sampling—— reducing the imbalance at sample,让选择的样本更 representative;
- balanced feature pyramid—— reducing the imbalance at feature,更加有效地整合利用多尺度特征;
- balanced L1 loss—— reducing the imbalance at objective,设计了一个更优的loss,引导整体训练更好的收敛;
1.IoU-balanced Sampling
在anchor-base的目标检测中,网络head输出大量的anchors(或者叫default boxes),这些box对于匹配到的ground truth有各自不同iou,而大部分iou都很小(负样本比例巨大),如果直接将所有正负样本送入loss的计算将会导致模型往背景的方向过拟合,因此前人做了很多解决正负样本不平衡的工作(例如在faster rcnn的RPN层中随机采样保证正负样本1:1;SSD中采用了难样本挖掘;OHEM等等),但是作者认为之前的方法多少还是有各自的缺点,比如OHEM对不干净的数据集不够鲁棒,focal loss不适合two-stage任务。
注意,难样本是训练中具有代表性的样本哦(类似于学生时代的错题回顾),那么如何在避免上述问题的情况下,让模型更关注于此呢?
作者的思路:既然选择box的方式是sampling,那么sampling的时候能不能找到一些规律呢。因此做了下面的统计:

上面统计了随机采样和难样本随iou的分布。
可以知道:超过60%的hard negative与gt超过0.05的iou;但随机采样只有30%超过0.05iou;说明困难样本并不根据iou均匀分布在原有样本中,也就是两者分布不match!既然说要让模型更关注于hard example,那怎么结合这样的规律来做点事情呢?
作者的思路:分层抽样替换随机抽样

K:将原有对负样本的采样区间分成K个区间(不一定要均匀);
N:总共采的负样本数;
M_k:每个区间sampling candidates数量;
p_k:最终算出每个区间采样的概率。
可以看出后两个变量反相关,candidates越少,越倾向于sample,这样做,表面上是有效提高了高iou区间的样本比例,但深层原因是给了一个先验的分布,将hard example与sample的分布match起来(注意这个分布也算是hyper-parameters,跟数据集有关的)。
不过我认为,作者这样做也无法保证采的每一个样本都hard呀,但是不可否认的是,这是在不增加计算量的前提下,尽可能提高hard的比例。
代码复现
这部分是自己手撕的,对于paper里面按概率采样,我改成了在每个区间内随机采样固定box(不过这样的问题是如果区间内box candidate过少只能全部采集了),如有不对请提出宝贵建议。
'''iou balanced hard negative mining
前面代码已经定义label:i指batch,1指前景,0指背景,-1指not care
小于thresh的box label先全部设为0(back ground),需要筛去冗余box,标记为-1
'''
bg_inds = torch.nonzero(labels[i] == 0).view(-1)
intervals = cfg.HNM_INTERVAL #[0,0.05,0.1,0.5]
num_sample = cfg.HNM_NUM_SAMPLE #[96,16,16]
num_intervals = len(interval)-1 #3
for m in range(num_intervals):
in_interval = ((max_overlaps >= intervals[m])&
(max_overlaps < intervals[m+1]))
#如果区间内样本数太少则全部采样
if torch.numel(in_interval) <= num_sample[m]:
continue
#如果太多则随机抽取
else:
rand_num = torch.from_numpy(np.random.permutation(torch.numel(in_interval))).type_as(gt_boxes).long()
disable_inds = bg_inds[rand_num[num_sample[m]:]]
labels[i][disable_inds] = -1 #i指batch索引 将冗余box标记定义为-1
2.Balanced Feature Pyramid
最近FPN、PANet、ZigZagNet,真是把特征融合变着花样玩,可以说特征融合是接下来的一个大趋势了。但是,上述这些方法都是top-bottom,bottom-top等方式,更多的是关注相邻分辨率,并且非相邻层所包含的语义信息在信息融合过程中会被稀释一次,所以作者认为这样的过程也是imbalance的。
思路:以FPN(faster-rcnn)为基础,对四个level的特征进行rescale,integrate和refine进一步融合特征信息,最后再和原特征相加,增强原特征。
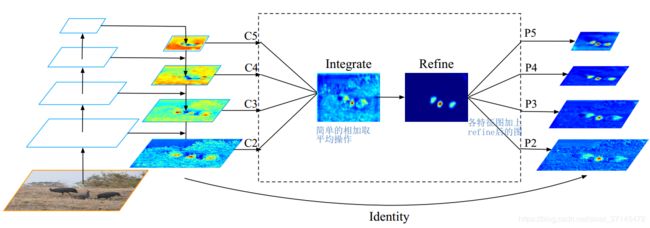
关键的refine操作使用的是kaiming大神的non-local。

non-local借鉴传统图像去噪算法,整合了全局信息,计算量少,并且输入输出维度相同,可以整合进目前各种baseline中(事实上已经有很多在这么做了),这边由于篇幅原因就不展开叙述。
而Libra RCNN利用FPN与non-local各自优势很好的解决了imbalance问题(有点像BN是不是)。
non_local复现
这部分代码参考mmdetection,代码还是非常清晰的,各位主要看一下计算过程。只截取部分代码,__ init__函数里面定义的self.g、self.theta、self.phi、self.conv_out 我都设置成了conv2d和gn组成的Sequential。
- embedded_gaussian公式:

def embedded_gaussian(self, theta_x, phi_x):
#[N, HxW, C] * [N, C, HxW] ->
# pairwise_weight: [N, HxW, HxW]
pairwise_weight = torch.matmul(theta_x, phi_x)
if self.use_scale:
# theta_x.shape[-1] is `self.inter_channels`
pairwise_weight /= theta_x.shape[-1]**-0.5
#pairwise_weight = pairwise_weight.softmax(dim=-1)
pairwise_weight = torch.softmax(pairwise_weight,dim=-1)
return pairwise_weight
def forward(self, x):
n, _, h, w = x.shape
# g_x: [N, HxW, C]
g_x = self.g(x).view(n, self.inter_channels, -1)
g_x = g_x.permute(0, 2, 1)
# theta_x: [N, HxW, C]
theta_x = self.theta(x).view(n, self.inter_channels, -1)
theta_x = theta_x.permute(0, 2, 1)
# phi_x: [N, C, HxW]
phi_x = self.phi(x).view(n, self.inter_channels, -1)
# pairwise_weight: [N, HxW, HxW]
pairwise_weight = self.embedded_gaussian(theta_x, phi_x)
# y: [N, HxW, C]
y = torch.matmul(pairwise_weight, g_x)
# y: [N, C, H, W]
y = y.permute(0, 2, 1).reshape(n, self.inter_channels, h, w)
output = x + self.conv_out(y)
return output
BFP复现
这边就是整合FPN中的上下文信息进行的一系列操作。就放了forward函数。
def forward(self, inputs):
assert len(inputs) == self.num_levels
#{C2; C3; C4; C5} channel:256
# step 1: 整合四个特征图,resize成相同维度
#使用了F.adaptive_max_pool2d和F.upsample,注意pytorch版本的区别,所以可能要换一下函数。
feats = []
gather_size = inputs[self.refine_level].size()[2:]
for i in range(self.num_levels):
input_size=inputs[i].size()[2:]
#print('inputs:',input_size,'gather_size:',gather_size)
if input_size[0] > gather_size[0]:#i < self.refine_level:
gathered = F.adaptive_max_pool2d(
inputs[i], output_size=gather_size)
elif input_size[0] == gather_size[0]:#i == self.refine_level:
gathered = inputs[i]
else:
gathered = F.upsample(inputs[i], size=gather_size, mode='bilinear') #interpolate
feats.append(gathered)
bsf = sum(feats) / len(feats) #取平均
# step 2: 进行non-local,这边self.refine就是non-local
bsf = self.refine(bsf)
# step 3: refine后的feature加回去,并resize回原尺寸
outs = []
for i in range(self.num_levels):
out_size = inputs[i].size()[2:]
if out_size[0] > gather_size[0]:#i < self.refine_level:
#residual = F.interpolate(bsf, size=out_size, mode='nearest')
residual = F.upsample(bsf, size=out_size, mode='bilinear')
elif out_size[0] == gather_size[0]:#i == self.refine_level:
residual = bsf
else:
residual = F.adaptive_max_pool2d(bsf, output_size=out_size)
outs.append(residual + inputs[i])
return tuple(outs)
3.Balanced L1 Loss
目标检测实质上是多任务学习(cls®),那么如何平衡两者的权重应该是一个值得探讨的话题。通常都是人为手动调整各任务之间的权重(比如对回归loss乘以系数),但是由于回归任务unbounded的特性,直接增大回归loss常导致对outliers更加敏感(类似于噪声)。这边把样本损失大于等于 1.0 的叫做 outliers,小于的叫做 inliers。这也不是胡乱猜测,经过统计,发现outliers贡献了70%以上的梯度,而大量的inliers只有30%的贡献。作者从损失函数的角度增大了inliers贡献的梯度,从而在分类、整体定位和准确定位方面实现更加平衡的训练。具体就是将原来的smooth L1 loss 的梯度替换为:

其中
![]()
γ可以调整梯度的上界,用以balance各任务所贡献的梯度。
梯度和损失函数如图:

可以看到随着α的减小,inliers的梯度能够很好地增强。
Balanced L1 Loss复现
def _balanced_l1_loss(bbox_pred, bbox_targets,alpha,gamma):
'''bbox_pred, bbox_targets:[batch,num_boxes,4]'''
diff=torch.abs(bbox_pred-bbox_targets)
b = np.e**(gamma / alpha) - 1
loss_box = torch.where(
diff<1,
alpha / b *(b * diff + 1) * torch.log(b * diff + 1) - alpha * diff,
gamma * diff + gamma / b - alpha
)
return loss_box.mean()
其中 torch.where 用法:
第一个是判断条件,第二个是符合条件的设置值,第三个是不满足条件的设置值。
总结
三个方法都很干净,尤其是sampling和loss,即使没有改变网络结构仍然可以有效涨点。其实思路都是一样的,通过试验或统计看到潜在的imbalance现象,根据样本或loss或feature的分布来做一些事情,非常实用。