深度学习计算机视觉实战(二) :pytorch上实现对小数据集的迁移学习Transfer Learning(附源码及详细注释)
前言
本文从概念出发,讨论迁移学习在不同场景下的使用方法,并通过实例在pytorch上运行来进一步巩固。
目录
- 前言
- 迁移学习(Transfer Learning)
- 概念
- 应用场景
- Pytorch代码详解
- 开发环境
- 数据集说明
- 代码详解
- 库依赖
- 数据集加载
- 图片数据显示
- 模型训练函数
- 预测效果展示函数
- 方案一:参数微调
- 方案二:固定特征提取器
- 运行结果
- 完整训练源码
- 修改记录
迁移学习(Transfer Learning)
概念
传统的机器学习/数据挖掘只有在训练集数据和测试集数据都来自同一个feature space(特征空间)和统一分布的时候才运行的比较好,这意味着每一次换了数据都要重新训练模型,以至于过于麻烦。对于绝大多数开发者来说,在实践中很少有人从头开始训练整个卷积网络(使用随机初始化),因为拥有足够大小的数据集相对较少。即便是不同的事物,feature space都有一定的共通性,这使得在训练过的成熟网络同样通过微调、部分修改后适用于相近的一系列问题。故迁移学习是十分高效的一种学习方式。
在实践中,由于数据集不够大,很少有人从头开始训练网络。常见的做法是使用预训练的网络来重新fine-tune,或者当做特征提取器。常见的两类迁移学习场景:
- 卷积网络当做特征提取器。使用在ImageNet上预训练的网络,去掉最后的全连接层,剩余部分当做特征提取器(例如AlexNet在最后分类器前,是4096维的特征向量)。这样提取的特征叫做CNN codes。得到这样的特征后,可以使用线性分类器(Liner SVM、Softmax等)来分类图像。
- Fine-tuning卷积网络。替换掉网络的输入层(数据),使用新的数据继续训练。Fine-tune时可以选择fine-tune的全部层或部分层。通常,前面的层提取的是图像的通用特征(generic features)(如边缘检测,色彩检测),这些特征对许多任务都有用。后面的层提取的是与特定类别有关的特征,故fine-tune时常常只需要采用较小的学习率来Fine-tuning后面的层。
应用场景
使用迁移学习时要注意,预训练模型应用场景,要和当前任务差距不大
- 待训练的数据集较小,已训练的模型和当前任务相似。只重新训练已有模型的靠近输出的几层,例如将ImageNet中输出层原来可以判别一万种输出的网络改为只判别猫的品种,从而利用已有网络来做低层次的特征提取。
- 待训练的数据集较小,已训练的模型和当前任务场景差距较大。例如你有的已训练网络能识别出白天高速路上的违章车辆,你需要训练一个能识别出夜间违章车辆的模型,由于不管白天夜晚,交通规则是没有变化的。故只需将网络靠近输入的那几层重新训练,等到新的网络能够提取出夜间车辆的基本信息后,就可用预训练模型,而不是从头开始。
- 待训练的数据集较大,已有模型的训练数据和现有的训练数据类似。使用原网络的结构,并保留每一层的节点权重,再逐层微调。
- 待训练的数据集较大,已有的模型和新模型的数据差异度很高。从头开始,重新训练。
参考:CS231n课程
Pytorch代码详解
开发环境
| 工具包 | 版本 |
|---|---|
| python | 3.6.2 |
| torch | 1.0.0 |
| torchvision | 0.2.1 |
| visdom | 0.1.7 |
| matplotlib | 2.0.2 |
| numpy | 1.15.4 |
数据集说明
下载链接:https://download.pytorch.org/tutorial/hymenoptera_data.zip
这是pytorch官方的数据集,取自于imageNet的非常小的子集。
其训练集和验证集的数目见下表:
| 类别 | 训练集 | 验证集 |
|---|---|---|
| 蜜蜂 | 121 | 83 |
| 蚂蚁 | 124 | 70 |
由于数据集十分有限,我们无法从零开始训练成有较好效果的网络,但迁移学习+一些正则化方法(如数据增强)的引入,使得其成为了可能。符合应用场景1:待训练的数据集较小,已训练的模型和当前任务相似,故我们只需重新训练已有模型的靠近输出的几层即可。
代码详解
库依赖
import torch
import torch.nn as nn
import torch.optim as optim
from torch.optim import lr_scheduler
import numpy as np
import torchvision
from torchvision import datasets, models, transforms
import matplotlib.pyplot as plt
import time
import os
import copy # 浅拷贝 copy 深拷贝 deepcopy
数据集加载
######################################################################
# 数据加载
# ---------
# 训练集:数据增强+标准化
# 验证集:标准化
data_transforms = {
'train': transforms.Compose([
transforms.RandomResizedCrop(224), # 将图片随机裁切成224*224的大小
transforms.RandomHorizontalFlip(), # 将图片进行随机水平翻转
transforms.ToTensor(), # 将图片转换成tensor数据格式
# 把一个取值范围是[0,255]的PIL.Image或者shape为(H,W,C)的numpy.ndarray转换成
# 形状为[C,H,W]取值范围是[0,1.0]的torch.FloatTensor
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
# 给定均值:(R,G,B) 方差:(R,G,B),将Tensor正则化
]),
'val': transforms.Compose([
transforms.Resize(256), # 将图片随机裁切成256*256的大小
transforms.CenterCrop(224), # 图片中心裁切成224*224的大小
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
]),
}
data_dir = 'hymenoptera_data' # 数据集路径名
image_datasets = {x: datasets.ImageFolder(os.path.join(data_dir, x),data_transforms[x])
# ImageFolder : 通用数据加载器,根据文件夹的名称给其分类
# para1: 根文件夹路径train/val join方法:路径拼接
# para2: 调用data_transforms的图片预处理
for x in ['train', 'val']}
dataloaders = {x: torch.utils.data.DataLoader(image_datasets[x],
# 数据集组合采样器,并在数据集上提供单进程或多进程迭代器
batch_size=16, # mini-batch的每个batch包含的数据大小
shuffle=True, # 随机打乱
num_workers=0) # 用多少个子进程加载数据。0表示数据将在主进程中加载(默认: 0)
for x in ['train', 'val']}
dataset_sizes = {x: len(image_datasets[x]) for x in ['train', 'val']} # 记录train/var的数据集大小
class_names = image_datasets['train'].classes # 数据的类型名
torchvision.datasets.ImageFolder:一个通用的数据加载器,数据集中的数据以以下方式组织
root/dog/xxx.png
root/dog/xxx.png
root/dog/xxx.png
…
root/cat/123.png
root/cat/nsdf3.png
root/dog/xxz.png
…dset.ImageFolder(root="root folder path", [transform, target_transform])他有以下成员变量:
self.classes - 用一个list保存 类名
self.class_to_idx - 类名对应的 索引
self.imgs - 保存(img-path, class) tuple的list
图片数据显示
######################################################################
# 图片数据显示
# ----------------------
def imshow(inp, title=None):
"""Imshow for Tensor."""
inp = inp.numpy().transpose((1, 2, 0)) # 三维转置,交换维度, (C,H,W)->(H,W,C)
mean = np.array([0.485, 0.456, 0.406])
std = np.array([0.229, 0.224, 0.225])
inp = std * inp + mean # 归一化
inp = np.clip(inp, 0, 1) # 将矩阵中的元素限制在a_min, a_max之间, 标准化
plt.imshow(inp)
if title is not None:
plt.title(title)
plt.pause(0.001) # 暂停一段时间使得plot得以正常更新
# Get a batch of training data
inputs, classes = next(iter(dataloaders['train']))
# 通过iter()函数获取这些可迭代对象的迭代器,对获取到的迭代器不断使用
# next()函数来获取下一条数据
# (iter()函数实际上就是调用了可迭代对象的__iter__方法)
# inputs为一个batch的图片集合 (B x C x H x W)
# 制作图片阵列
out = torchvision.utils.make_grid(inputs) # 类似于做图像拼接,横向摆放方便显示(自带padding)
torchvision.utils.save_image(inputs, 'inputInstances.JPG') # 图像保存
imshow(out, title=[class_names[x] for x in classes]) # 图像展示
模型训练函数
######################################################################
# 模型训练
# ------------------
# - Scheduling the learning rate
# - Saving the best model
def train_model(model, criterion, optimizer, scheduler, num_epochs=25):
since = time.time() # 计时
best_model_wts = copy.deepcopy(model.state_dict()) # state_dict: 返回包含模块整个状态的字典
best_acc = 0.0
for epoch in range(num_epochs):
print('Epoch {}/{}'.format(epoch, num_epochs - 1))
print('-' * 10)
# 对每一个epoch都有训练和验证阶段
for phase in ['train', 'val']:
if phase == 'train':
scheduler.step()
model.train() # Set model to training mode
else:
model.eval() # Set model to evaluate mode
running_loss = 0.0
running_corrects = 0
# 对数据进行迭代
for inputs, labels in dataloaders[phase]:
inputs = inputs.to(device)
labels = labels.to(device)
optimizer.zero_grad() # 参数梯度归零
# with 语句:适用于对资源进行访问的场合,确保不管使用过程中是否发生异常
# 都会执行必要的“清理”操作,释放资源
with torch.set_grad_enabled(phase == 'train'): # 根据其参数模式启用或禁用grads
# forward
outputs = model(inputs)
_, preds = torch.max(outputs, 1) # 返回给定维度dim中输入张量的每一行的最大值,即预测值
loss = criterion(outputs, labels) # loss值计算
# backward + 仅在训练阶段进行参数更新
if phase == 'train':
loss.backward() # 计算当前张量的梯度并逆向传播更新参数
optimizer.step() # 执行单个优化步骤
# information statistics
running_loss += loss.item() * inputs.size(0) # item() → number
# size(0): size结果的第一位
running_corrects += torch.sum(preds == labels.data)
epoch_loss = running_loss / dataset_sizes[phase]
epoch_acc = running_corrects.double() / dataset_sizes[phase]
print('{} Loss: {:.4f} Acc: {:.4f}'.format(phase, epoch_loss, epoch_acc))
if phase == 'val' and epoch_acc > best_acc:
best_acc = epoch_acc
best_model_wts = copy.deepcopy(model.state_dict())
# deep copy the model
# 深度复制:完全复制整个模型,修改新模型不会影响原模型
print() # \n
time_elapsed = time.time() - since # 计算总用时
print('Training complete in {:.0f}m {:.0f}s'
.format(time_elapsed // 60, time_elapsed % 60))
print('Best val Acc: {:4f}'.format(best_acc))
# 加载最佳模型的参数/权重
model.load_state_dict(best_model_wts)
return model
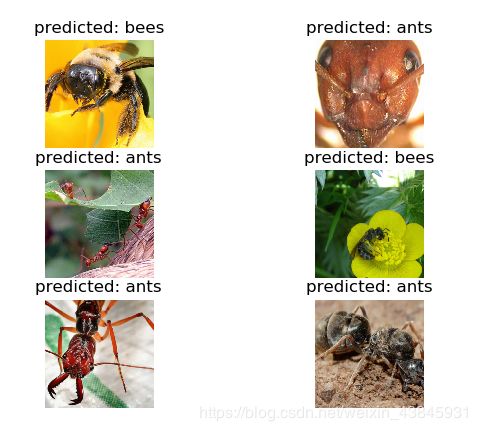
预测效果展示函数
######################################################################
# 模型预测效果显示函数
# ---------------------------------
# Generic function to display predictions for a few images
def visualize_model(model, num_images=6):
was_training = model.training
model.eval() # Sets the module in evaluation mode.
images_so_far = 0
fig = plt.figure()
with torch.no_grad():
for i, (inputs, labels) in enumerate(dataloaders['val']):
inputs = inputs.to(device)
labels = labels.to(device)
outputs = model(inputs)
_, preds = torch.max(outputs, 1) # 预测
for j in range(inputs.size()[0]):
images_so_far += 1
ax = plt.subplot(num_images//2, 2, images_so_far) # 将多个图画到一个平面
ax.axis('off') # 不显示坐标轴
ax.set_title('predicted: {}'.format(class_names[preds[j]]))
imshow(inputs.cpu().data[j])
if images_so_far == num_images:
model.train(mode=was_training) # Sets the module in training mode
return
model.train(mode=was_training)
方案一:参数微调
#############################################################################################
# 卷积网络参数微调
# ----------------------
# 加载训练好的resnet18的模型,并修改最后一层使得成为二分类问题
model_ft = models.resnet18(pretrained=True) # 加载训练好的resnet18的模型
num_ftrs = model_ft.fc.in_features # in_features: 返回全连接层的输入尺寸
model_ft.fc = nn.Linear(num_ftrs, 2) # 修改全连接层,使得最终输出尺寸为2
model_ft = model_ft.to(device)
criterion = nn.CrossEntropyLoss() # 交叉熵损失函数
# 使用SGD进行参数更新, lr设低,微调即可
optimizer_ft = optim.SGD(model_ft.parameters(), lr=0.001, momentum=0.9)
# 学习率衰减 Decay LR by a factor of 0.1 every 7 epochs
exp_lr_scheduler = lr_scheduler.StepLR(optimizer_ft, step_size=7, gamma=0.1)
#############################
# 训练+验证
# ------------------
# It should take around 15-25 min on CPU. On GPU though, it takes less than a
# minute.
model_ft = train_model(model_ft, criterion, optimizer_ft, exp_lr_scheduler, num_epochs=25)
visualize_model(model_ft)
torch.save(model_ft, 'model_Finetuning.pkl')
方案二:固定特征提取器
############################################################################################
# ConvNet作为固定特征提取器
# ----------------------------------
# Here, we need to freeze all the network except the final layer. We need
# to set ``requires_grad == False`` to freeze the parameters so that the
# gradients are not computed in ``backward()``.
#
# You can read more about this in the documentation
# `here `__.
model_conv = torchvision.models.resnet18(pretrained=True) # 加载训练好的resnet18的模型
for param in model_conv.parameters(): # 冻结参数使得在backward时不会更新参数
param.requires_grad = False
# 默认情况下,新构造的模块的参数具有requires_grad = True
# 使得在训练时只更新最后全连接层的参数
num_ftrs = model_conv.fc.in_features # 同finetuning
model_conv.fc = nn.Linear(num_ftrs, 2)
model_conv = model_conv.to(device)
criterion = nn.CrossEntropyLoss()
optimizer_conv = optim.SGD(model_conv.fc.parameters(), lr=0.001, momentum=0.9)
# Decay LR by a factor of 0.1 every 7 epochs
exp_lr_scheduler = lr_scheduler.StepLR(optimizer_conv, step_size=7, gamma=0.1)
#############################
# 训练+验证
# ------------------
# On CPU this will take about half the time compared to previous scenario.
# This is expected as gradients don't need to be computed for most of the
# network. However, forward does need to be computed.
#
model_conv = train_model(model_conv, criterion, optimizer_conv,
exp_lr_scheduler, num_epochs=25)
visualize_model(model_conv)
torch.save(model_conv, 'model_Fixed.pkl')
运行结果
方案一:参数微调
| epoch | 训练集损失值 | 训练集准确度(%) | 验证集损失值 | 验证集准确度(%) |
|---|---|---|---|---|
| 1 | 0.5876 | 66.80 | 0.4734 | 72.55 |
| 5 | 0.2054 | 90.98 | 0.1782 | 94.12 |
| 10 | 0.1296 | 94.67 | 0.1325 | 96.73 |
| 15 | 0.1835 | 92.62 | 0.1296 | 96.73 |
| 20 | 0.1232 | 94.26 | 0.1301 | 96.08 |
| 25 | 0.1864 | 93.64 | 0.1273 | 96.73 |
方案二:固定特征提取器
| epoch | 训练集损失值 | 训练集准确度(%) | 验证集损失值 | 验证集准确度(%) |
|---|---|---|---|---|
| 1 | 0.6379 | 63.93 | 0.4140 | 90.20 |
| 5 | 0.2322 | 91.39 | 0.1953 | 92.81 |
| 10 | 0.1927 | 93.03 | 0.1811 | 94.77 |
| 15 | 0.2115 | 93.03 | 0.1794 | 95.42 |
| 20 | 0.1892 | 94.26 | 0.1772 | 96.08 |
| 25 | 0.2136 | 91.39 | 0.1755 | 95.42 |

完整训练源码
github链接
https://github.com/HYPENG1/Transfer_Learning_Official
import torch
import torch.nn as nn
import torch.optim as optim
from torch.optim import lr_scheduler
import numpy as np
import torchvision
from torchvision import datasets, models, transforms
import matplotlib.pyplot as plt
import time
import os
import copy # 浅拷贝 copy 深拷贝 deepcopy
plt.ion() # 开启plt交互模式
######################################################################
# 数据加载
# ---------
# 训练集:数据增强+归一化
# 验证集:归一化
data_transforms = {
'train': transforms.Compose([
transforms.RandomResizedCrop(224), # 将图片随机裁切成224*224的大小
transforms.RandomHorizontalFlip(), # 将图片进行随机水平翻转
transforms.ToTensor(), # 将图片转换成tensor数据格式
# 把一个取值范围是[0,255]的PIL.Image或者shape为(H,W,C)的numpy.ndarray转换成
# 形状为[C,H,W]取值范围是[0,1.0]的torch.FloatTensor
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
# 给定均值:(R,G,B) 方差:(R,G,B),将Tensor归一化
]),
'val': transforms.Compose([
transforms.Resize(256), # 将图片随机裁切成256*256的大小
transforms.CenterCrop(224), # 图片中心裁切成224*224的大小
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
]),
}
data_dir = 'hymenoptera_data' # 数据集路径名
image_datasets = {x: datasets.ImageFolder(os.path.join(data_dir, x),data_transforms[x])
# ImageFolder : 通用数据加载器,根据文件夹的名称给其分类
# para1: 根文件夹路径train/val join方法:路径拼接
# para2: 调用data_transforms的图片预处理
for x in ['train', 'val']}
dataloaders = {x: torch.utils.data.DataLoader(image_datasets[x],
# 数据集组合采样器,并在数据集上提供单进程或多进程迭代器
batch_size=16, # mini-batch的每个batch包含的数据大小
shuffle=True, # 随机打乱
num_workers=0) # 用多少个子进程加载数据。0表示数据将在主进程中加载(默认: 0)
for x in ['train', 'val']}
dataset_sizes = {x: len(image_datasets[x]) for x in ['train', 'val']} # 记录train/var的数据集大小
class_names = image_datasets['train'].classes # 数据的类型名
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
######################################################################
# 图片数据显示
# ----------------------
def imshow(inp, title=None):
"""Imshow for Tensor."""
inp = inp.numpy().transpose((1, 2, 0)) # 三维转置,交换维度, (C,H,W)->(H,W,C)
mean = np.array([0.485, 0.456, 0.406])
std = np.array([0.229, 0.224, 0.225])
inp = std * inp + mean # 归一化
inp = np.clip(inp, 0, 1) # 将矩阵中的元素限制在a_min, a_max之间, 标准化
plt.imshow(inp)
if title is not None:
plt.title(title)
plt.pause(0.001) # 暂停一段时间使得plot得以正常更新
# Get a batch of training data
inputs, classes = next(iter(dataloaders['train']))
# 通过iter()函数获取这些可迭代对象的迭代器,对获取到的迭代器不断使用
# next()函数来获取下一条数据
# (iter()函数实际上就是调用了可迭代对象的__iter__方法)
# inputs为一个batch的图片集合 (B x C x H x W)
# 制作图片阵列
out = torchvision.utils.make_grid(inputs) # 类似于做图像拼接,横向摆放方便显示(自带padding)
torchvision.utils.save_image(inputs, 'inputInstances.JPG') # 图像保存
imshow(out, title=[class_names[x] for x in classes]) # 图像展示
######################################################################
# 模型训练
# ------------------
# - Scheduling the learning rate
# - Saving the best model
def train_model(model, criterion, optimizer, scheduler, num_epochs=25):
since = time.time() # 计时
best_model_wts = copy.deepcopy(model.state_dict()) # state_dict: 返回包含模块整个状态的字典
best_acc = 0.0
for epoch in range(num_epochs):
print('Epoch {}/{}'.format(epoch, num_epochs - 1))
print('-' * 10)
# 对每一个epoch都有训练和验证阶段
for phase in ['train', 'val']:
if phase == 'train':
scheduler.step()
model.train() # Set model to training mode
else:
model.eval() # Set model to evaluate mode
running_loss = 0.0
running_corrects = 0
# 对数据进行迭代
for inputs, labels in dataloaders[phase]:
inputs = inputs.to(device)
labels = labels.to(device)
optimizer.zero_grad() # 参数梯度归零
# with 语句:适用于对资源进行访问的场合,确保不管使用过程中是否发生异常
# 都会执行必要的“清理”操作,释放资源
with torch.set_grad_enabled(phase == 'train'): # 根据其参数模式启用或禁用grads
# forward
outputs = model(inputs)
_, preds = torch.max(outputs, 1) # 返回给定维度dim中输入张量的每一行的最大值,即预测值
loss = criterion(outputs, labels) # loss值计算
# backward + 仅在训练阶段进行参数更新
if phase == 'train':
loss.backward() # 计算当前张量的梯度并逆向传播更新参数
optimizer.step() # 执行单个优化步骤
# information statistics
running_loss += loss.item() * inputs.size(0) # item() → number
# size(0): size结果的第一位
running_corrects += torch.sum(preds == labels.data)
epoch_loss = running_loss / dataset_sizes[phase]
epoch_acc = running_corrects.double() / dataset_sizes[phase]
print('{} Loss: {:.4f} Acc: {:.4f}'.format(phase, epoch_loss, epoch_acc))
if phase == 'val' and epoch_acc > best_acc:
best_acc = epoch_acc
best_model_wts = copy.deepcopy(model.state_dict())
# deep copy the model
# 深度复制:完全复制整个模型,修改新模型不会影响原模型
print() # \n
time_elapsed = time.time() - since # 计算总用时
print('Training complete in {:.0f}m {:.0f}s'
.format(time_elapsed // 60, time_elapsed % 60))
print('Best val Acc: {:4f}'.format(best_acc))
# 加载最佳模型的参数/权重
model.load_state_dict(best_model_wts)
return model
######################################################################
# 模型预测效果显示函数
# ---------------------------------
# Generic function to display predictions for a few images
def visualize_model(model, num_images=6):
was_training = model.training
model.eval() # Sets the module in evaluation mode.
images_so_far = 0
fig = plt.figure()
with torch.no_grad():
for i, (inputs, labels) in enumerate(dataloaders['val']):
inputs = inputs.to(device)
labels = labels.to(device)
outputs = model(inputs)
_, preds = torch.max(outputs, 1) # 预测
for j in range(inputs.size()[0]):
images_so_far += 1
ax = plt.subplot(num_images//2, 2, images_so_far) # 将多个图画到一个平面
ax.axis('off') # 不显示坐标轴
ax.set_title('predicted: {}'.format(class_names[preds[j]]))
imshow(inputs.cpu().data[j])
if images_so_far == num_images:
model.train(mode=was_training) # Sets the module in training mode
return
model.train(mode=was_training)
#############################################################################################
# 卷积网络参数微调
# ----------------------
# 加载训练好的resnet18的模型,并修改最后一层使得成为二分类问题
model_ft = models.resnet18(pretrained=True) # 加载训练好的resnet18的模型
num_ftrs = model_ft.fc.in_features # in_features: 返回全连接层的输入尺寸
model_ft.fc = nn.Linear(num_ftrs, 2) # 修改全连接层,使得最终输出尺寸为2
model_ft = model_ft.to(device)
criterion = nn.CrossEntropyLoss() # 交叉熵损失函数
# 使用SGD进行参数更新, lr设低,微调即可
optimizer_ft = optim.SGD(model_ft.parameters(), lr=0.001, momentum=0.9)
# 学习率衰减 Decay LR by a factor of 0.1 every 7 epochs
exp_lr_scheduler = lr_scheduler.StepLR(optimizer_ft, step_size=7, gamma=0.1)
#############################
# 训练+验证
# ------------------
# It should take around 15-25 min on CPU. On GPU though, it takes less than a
# minute.
model_ft = train_model(model_ft, criterion, optimizer_ft, exp_lr_scheduler, num_epochs=25)
visualize_model(model_ft)
torch.save(model_ft, 'model_Finetuning.pkl')
#############################################################################################
# ConvNet作为固定特征提取器
# ----------------------------------
# Here, we need to freeze all the network except the final layer. We need
# to set ``requires_grad == False`` to freeze the parameters so that the
# gradients are not computed in ``backward()``.
#
# You can read more about this in the documentation
# `here `__.
model_conv = torchvision.models.resnet18(pretrained=True) # 加载训练好的resnet18的模型
for param in model_conv.parameters(): # 冻结参数使得在backward时不会更新参数
param.requires_grad = False
# 默认情况下,新构造的模块的参数具有requires_grad = True
# 使得在训练时只更新最后全连接层的参数
num_ftrs = model_conv.fc.in_features # 同finetuning
model_conv.fc = nn.Linear(num_ftrs, 2)
model_conv = model_conv.to(device)
criterion = nn.CrossEntropyLoss()
optimizer_conv = optim.SGD(model_conv.fc.parameters(), lr=0.001, momentum=0.9)
# Decay LR by a factor of 0.1 every 7 epochs
exp_lr_scheduler = lr_scheduler.StepLR(optimizer_conv, step_size=7, gamma=0.1)
#############################
# 训练+验证
# ------------------
# On CPU this will take about half the time compared to previous scenario.
# This is expected as gradients don't need to be computed for most of the
# network. However, forward does need to be computed.
#
model_conv = train_model(model_conv, criterion, optimizer_conv,
exp_lr_scheduler, num_epochs=25)
visualize_model(model_conv)
torch.save(model_conv, 'model_Fixed.pkl')
plt.ioff()
plt.show()
修改记录
| Time | Note | Author |
|---|---|---|
| 19.4.18 | 原始版本 | Yooo_Hu |
| 19.4.22 | 注释修改 | Yooo_Hu |