树
文章目录
- 什么是树
- 二叉树
- 满二叉树
- 完全二叉树
- 二叉树存储结构
- 二叉树的应用
- 查找
- 维持相对顺序
- 二叉树的遍历
- 深度优先遍历
- 广度优先遍历
- 二叉树和散列表
有许多逻辑关系并不是简单的线性关系,在实际场景中,常常存在着一对多,甚至是多对多的情况,其中树就是典型的非线性数据结构。
什么是树
什么是树呢?在现实生活中有很多体现树的逻辑的例子。如企业里的职级关系,也是一个“树”。

这些树有共同的特点,从同一个“根”衍生出许多“枝干”,再从每一个“枝干”衍生出许多更小的“枝干”,最后衍生出更多的“叶子”。
在数据结构中,树的定义如下。
树(tree)是n(n≥0)个节点的有限集。当n=0时,称为空树。在任意一个非空树
中,有如下特点。
1:有且仅有一个特定的称为根的节点。
2:当n>1时,其余节点可分为m(m>0)个互不相交的有限集,每一个集合本身又是一个树,并称为根的子树。

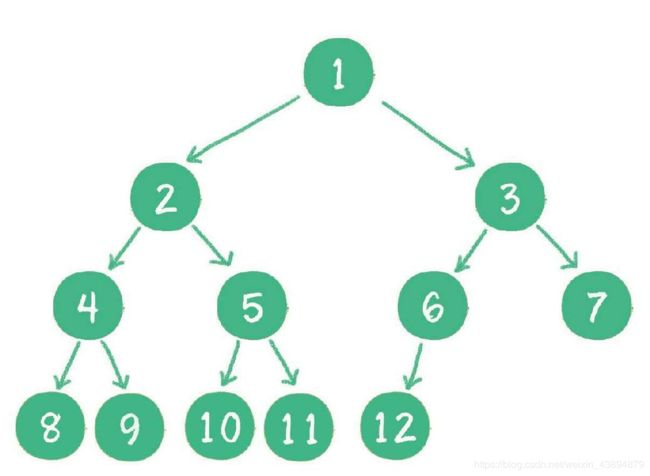
在上图中,节点1是根节点(root);节点5、6、7、8、9是树的末端,没有“孩子”,被称为叶子节点(leaf)。图中的虚线部分,是根节点1的其中一个子树。
同时,树的结构从根节点到叶子节点,分为不同的层级。从一个节点的角度来看,它的上下级和同级节点关系如下。
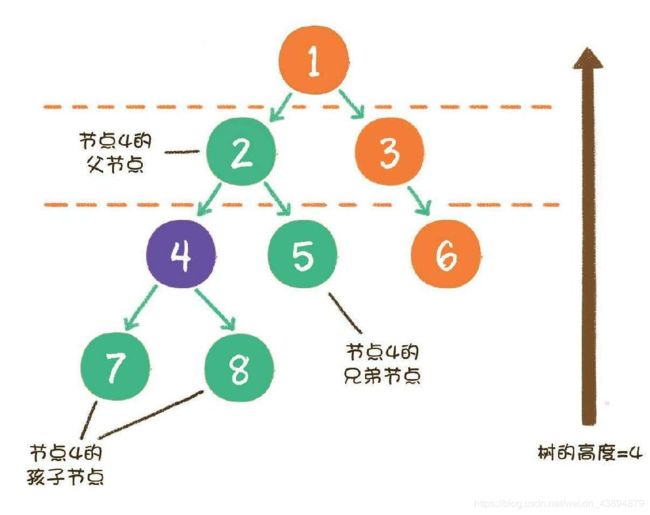
在上图中,节点4的上一级节点,是节点4的父节点(parent);从节点4衍生出来的节点,是节点4的孩子节点(child);和节点4同级,由同一个父节点衍生出来的节点,是节点4的兄弟节点(sibling)。
树的最大层级数,被称为树的高度或深度。显然,上图这个树的高度是4。
关于树有三个相似的概念:高度(Height)、深度(Depth)、层(Level)。它们的定义是这样的:
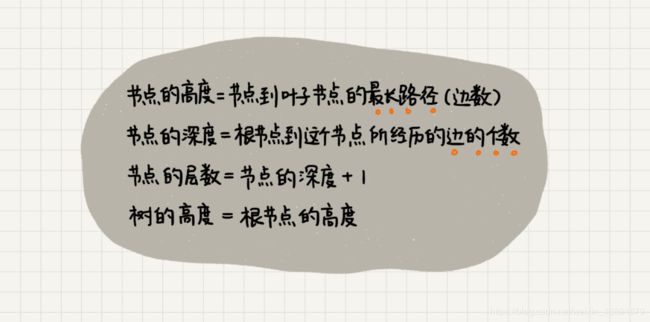
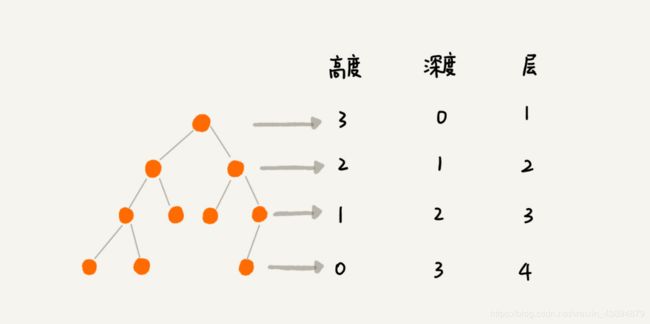
这三个概念的定义比较容易混淆,描述起来也比较空洞。举个例子说明一下,一看应该就能明白。
二叉树
二叉树(binary tree)是树的一种特殊形式。二叉,顾名思义,这种树的每个节点最多有2个孩子节点。注意,这里是最多有2个,也可能只有1个,或者没有孩子节点。

二叉树节点的两个孩子节点,一个被称为左孩子(left child),一个被称为右孩子(right child)。
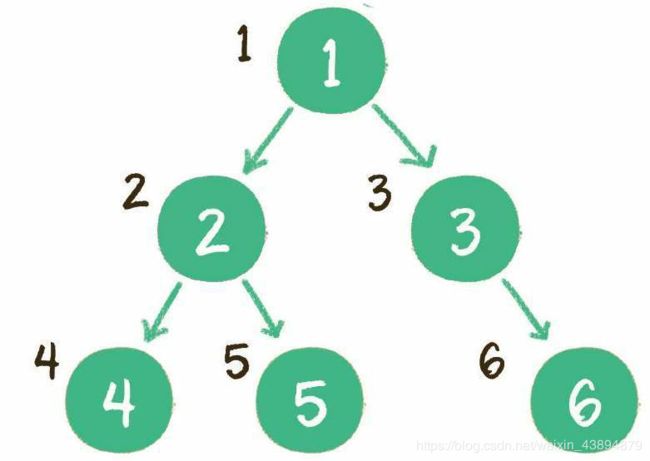
满二叉树
一个二叉树的所有非叶子节点都存在左右孩子,并且所有叶子节点都在同一层级上,那么这个树就是满二叉树。
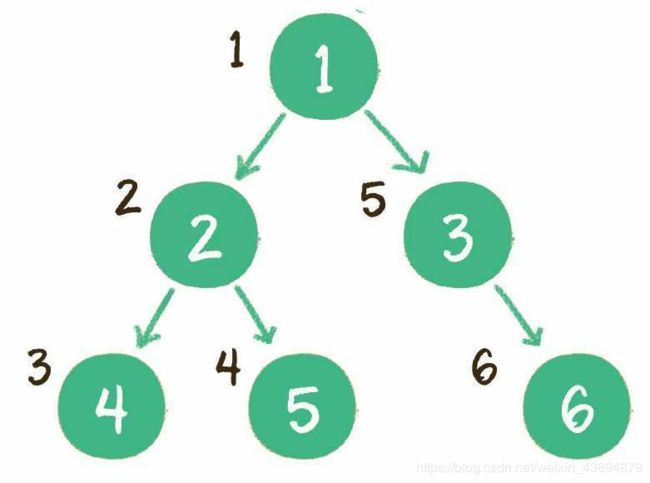
完全二叉树
对一个有n个节点的二叉树,按层级顺序编号,则所有节点的编号为从1到n。如果这
个树所有节点和同样深度的满二叉树的编号为从1到n的节点位置相同,则这个二叉树为完全二叉树。
完全二叉树的条件没有满二叉树那么苛刻:满二叉树要求所有分支都是满的;而完全二叉树只需保证最后一个节点之前的节点都齐全即可。
二叉树存储结构
1: 链式存储结构。
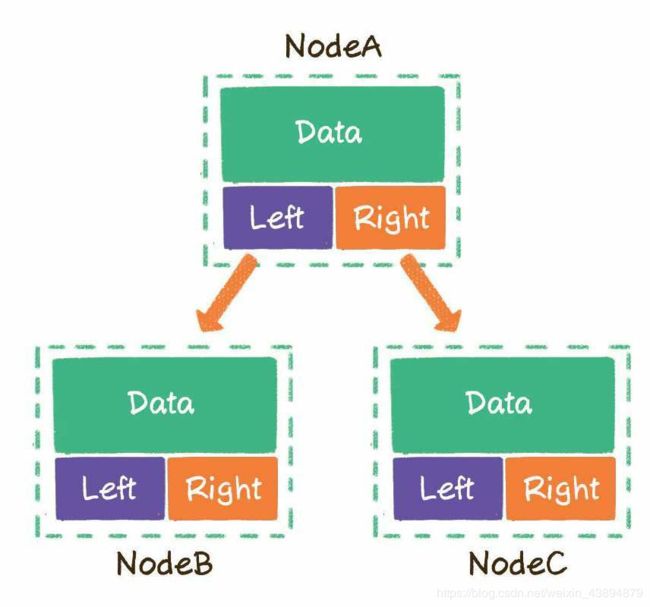
二叉树的每一个节点包含3部分。
存储数据的data变量
指向左孩子的left指针
指向右孩子的right指针
2: 数组。

如果节点 X 存储在数组中下标为 i 的位置,下标为 2 * i 的位置存储的就是左子节点,下标为 2 * i + 1 的位置存储的就是右子节点。使用数组存储时,会按照层级顺序把二叉树的节点放到数组中对应的位置上。如果某一个节点的左孩子或右孩子空缺,则数组的相应位置也空出来。
二叉树的应用
查找
二叉查找树(binary search tree)。光看名字就可以知道,这种二叉树的主要作用就是进行查找操作。
二叉查找树在二叉树的基础上添加了以下几个条件。
1:如果左子树不为空,则左子树上所有节点的值均小于根节点的值
2:如果右子树不为空,则右子树上所有节点的值均大于根节点的值
3:左、右子树也都是二叉查找树
增加这些条件可以使查找更加方便
对于一个节点分布相对均衡的二叉查找树来说,如果节点总数是n,那么搜索节点的
时间复杂度就是O(logn),和树的深度是一样的。这种依靠比较大小来逐步查找的方式,和二分查找算法非常相似。
使用链表实现二叉查找树:二叉查找树代码实现
维持相对顺序
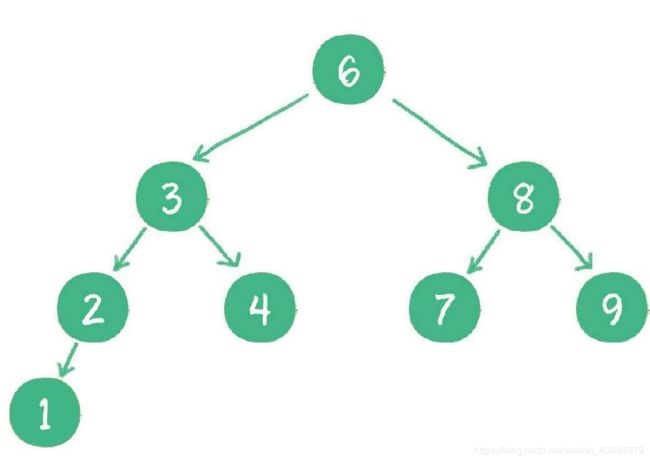
二叉查找树要求左子树小于父节点,右子树大于父节点,正是这样保证了二叉树的有序性。因此二叉查找树还有另一个名字——二叉排序树(binary sort tree)。新插入的节点,同样要遵循二叉排序树的原则。
例如插入新元素5,由于5<6,5>3,5>4,所以5最终会插入到节点4的右孩子位置。

这一切看起来很顺利,然而却隐藏着一个致命的问题。什么问题呢?下面请试着在二叉查找树中依次插入9、8、7、6、5、4,看看会出现什么结果。
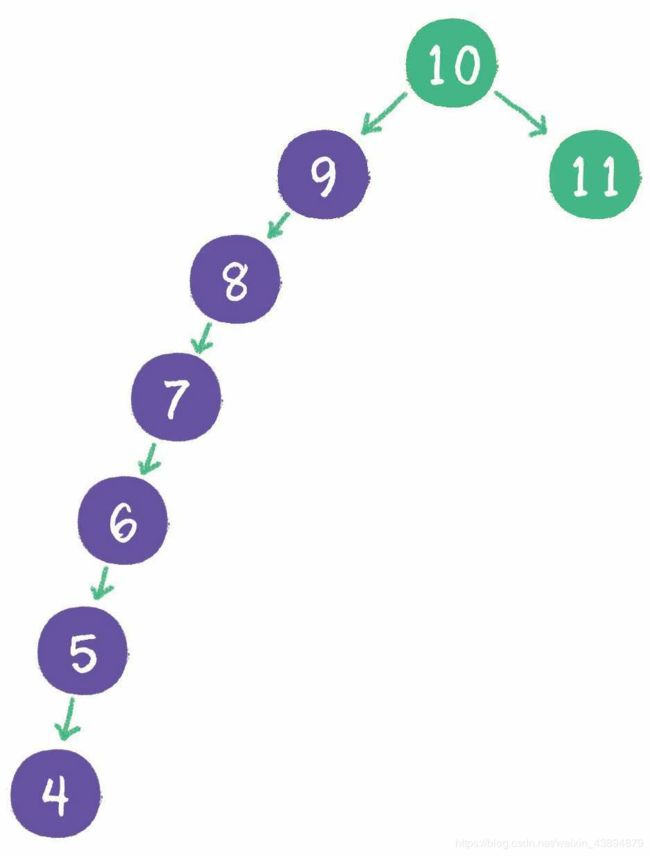
这种情况出现之后,查询节点的时间复杂度也退化成了O(n)。怎么解决这个问题呢?这就涉及二叉树的自平衡了。二叉树自平衡的方式有多种,如红黑树、AVL树、树堆等。
二叉树的遍历
从节点之间位置关系的角度来看,二叉树的遍历分为四种。
1:前序遍历
2:中序遍历
3:后序遍历
4:层序遍历
从更宏观的角度来看,二叉树的遍历归结为两大类。
1:深度优先遍历(前序遍历、中序遍历、后序遍历)
2:广度优先遍历(层序遍历)
深度优先遍历
所谓深度优先,顾名思义,就是偏向于纵深,“一头扎到底”的访问方式。
前序遍历
前序遍历是指,对于树中的任意节点来说,先打印这个节点,然后再打印它的左子树,最后打印它的右子树。
中序遍历
中序遍历是指,对于树中的任意节点来说,先打印它的左子树,然后再打印它本身,最后打印它的右子树。

后序遍历
后序遍历是指,对于树中的任意节点来说,先打印它的左子树,然后再打印它的右子树,最后打印这个节点本身。

三种深度优先遍历的对比

使用递归实现三种深度优先遍历:深度优先遍历代码实现
绝大多数可以用递归解决的问题,其实都可以用另一种数据结构来解决,这种数据结构就是栈。因为递归和栈都有回溯的特性。不过要比递归实现稍微复杂一点。
广度优先遍历
层序遍历,顾名思义,就是二叉树按照从根节点到叶子节点的层次关系,一层一层横向遍历各个节点。
可是,二叉树同一层次的节点之间是没有
直接关联的,如何实现这种层序遍历呢?
这里同样需要借助一个数据结构来辅助工作,这个数据结构就是队列。
详细遍历步骤如下。
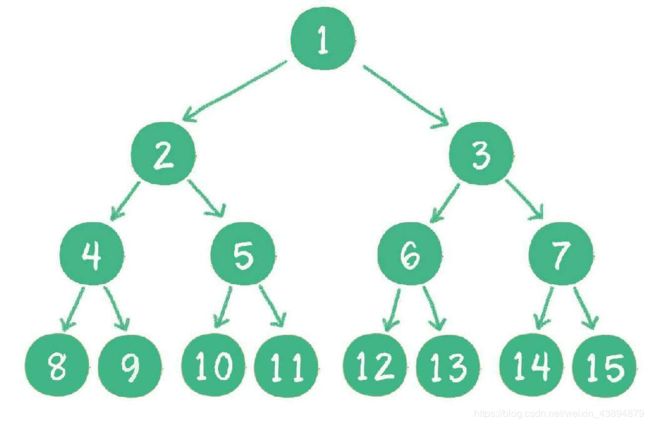
1:根节点1进入队列。
2:节点1出队,输出节点1,并得到节点1的左孩子节点2、右孩子节点3。让节点2和节点3入队。
3:节点2出队,输出节点2,并得到节点2的左孩子节点4、右孩子节点5。让节点4和节点5入队。
……
……
使用递归实现广度优先遍历:广度优先遍历代码实现
二叉树和散列表
相对散列表,好像并没有什么优势,那我们为什么还要用二叉查找树呢?
第一,散列表中的数据是无序存储的,如果要输出有序的数据,需要先进行排序。而对于二叉查找树来说,我们只需要中序遍历,就可以在 O(n) 的时间复杂度内,输出有序的数据序列。
第二,散列表扩容耗时很多,而且当遇到散列冲突时,性能不稳定,尽管二叉查找树的性能不稳定,但是在工程中,我们最常用的平衡二叉查找树的性能非常稳定,时间复杂度稳定在 O(logn)。
第三,笼统地来说,尽管散列表的查找等操作的时间复杂度是常量级的,但因为哈希冲突的存在,这个常量不一定比 logn 小,所以实际的查找速度可能不一定比 O(logn) 快。加上哈希函数的耗时,也不一定就比平衡二叉查找树的效率高。
第四,散列表的构造比二叉查找树要复杂,需要考虑的东西很多。比如散列函数的设计、冲突解决办法、扩容、缩容等。平衡二叉查找树只需要考虑平衡性这一个问题,而且这个问题的解决方案比较成熟、固定。
最后,为了避免过多的散列冲突,散列表装载因子不能太大,特别是基于开放寻址法解决冲突的散列表,不然会浪费一定的存储空间。