【论文笔记】ResNeXt最强论文解析!一文读懂!
Aggregated Residual Transformations for Deep Neural Networks
文章目录
- Aggregated Residual Transformations for Deep Neural Networks
- 1.引言
- 2. 相关工作
- 多分支卷积网络
- 分组卷积
- 压缩卷积网络
- 集成
- 3. 方法
- 3.1 模板
- 3.2. 回顾简单神经元
- 3.3. 聚合转换
- 3.4. 模型容量
- 4. 实现细节
- 5. 实验
- 5.1. ImageNet-1K上实验
- 5.2. ImageNet-5K实验
- 5.3. CIFAR实验
- 5.4. COCO目标检测实验
- A. 实现细节: CIFAR
- B. 实现细节: 目标检测
- 参考
.
我们为图像分类提出一个简单、高度模块化的网络结构。网络通过重复一个block来构建,这个block聚合了一组有相同拓扑的转换。我们的简单设计产生了一个同构的、多分支的 架构,它只需要设置几个超参数。这个策略揭示了一个新的维度,我们称之为"基数-cardinality"(这组转换的大小),除了深度和宽度之外的一个关键因子。在ImageNet-1K数据集上,我们的实验表明,在控制复制度的受限情况下,增加基数可以提升分类精度。而且当提升模型容量时(即增加模型复杂度),提升基数比更深或更宽更加有效。我们的模型叫ResNeXt,是参加ILSVRC 2016分类任务的基础,我们获得了第二名。我们进一步在ImageNet-5K 数据集和COCO检测数据集上研究ResNeXt,同样展示了比对应的ResNet更好的结果。代码和模型公布在https://github.com/facebookresearch/ResNeXt
论文地址
1.引言
视觉识别的研究正经历从"特征工程"到"网络工程"的转换[25, 24, 44, 34, 36, 38, 14]。与传统的手工设计特征相比(如:SIFT [29] 和 HOG [5]), 通过神经网络从大规模数据[33]中学习特征,在训练时需要最少的人工参与,并可以迁移到各种各样的识别任务上[7,10,28]. 不过,人的工作已经转移到为学习表示设计更好的网络架构。
随着超参数的增加(通道数、滤波器尺寸、步长等)设计网络架构变得日渐困难,特别是网络的层数很多时。VGG-nets [36]展示了一个简单有效构建非常深的网络的策略:堆叠相同形状的blocks. ResNets[14]继承了这种策略,堆叠的相同拓扑的模块。而且,我们认为,该规则的简单性可能会降低过度调整超参数以适应特定数据集的风险。VGGnets 和ResNets 的鲁棒性已经被各种视觉识别任务[7, 10, 9, 28, 31, 14]和非视觉任务包括语音[42,30]和语音[4,41,20]
不同于VGG-nets,Inception模型家族[38,17,39,37]证明了精心设计的拓扑能够以较低的理论复杂度达到令人信服的准确性。Inception模型随着时间改进[38,39], 但是一个共有的属性是分割-转换-合并策略。在一个Inception模块中,输入分割为几个低维嵌入(通过$1 \times 1 $卷积) ,使用特定的一组滤波转换( 3 × 3 , 5 × 5 3 \times 3,5\times 5 3×3,5×5等),然后通过拼接合并。可以看出,该体系结构的解空间是单个大层(例如,5×5)操作在一个高维嵌入解空间的严格子空间。Inception 模块中的分割-转换-合并行为,被期望可以接近大的、密集层的表示能力,但又有一个相对低的计算复杂度。
尽管精度很好,Inception模块的实现伴随着一系列复杂的因素-滤波器的数量和尺寸对每个独立的转换都是定做的,模块是分阶段定制的。尽管精心的组合这些组件产生了优秀的神经网络配方,如何将Inception架构适应到新的数据集/任务上通常不是明确的,特别是有这么多因子和超参需要设计。

本文,我们提出一个简单的架构,它采用了VGG/ResNets的重复层(layers)的策略,同时使用一种简单、可扩展的方式来利用分割-转换-合并策略。我们的网络的一个模块执行一组转换,每个转换在一个低维嵌入上执行,输出通过求和合并。我们追求这种概念(分割-转换-合并)的简单实现-聚合在一起的转换有相同的拓扑(如图Figure 1右)。这种设计思路允许将转换数量扩展到任意大,而不需要特殊设计。
有趣的是,在这种简单情况下,我们说明我们的模型有其它两种等价形式(图Figure 3),图Figure 3 (b)的重构呈现了类似InceptionResNet 模块的合并多个路径;但是我们的模块与所有现存的Inception 模块不同,我们的路径共享相同的拓扑,路径的数量可以轻易的独立出来作为一个因子来研究。在一个更简洁的重构中,我们的模块可以被Krizhevsky et al.’s的分组卷积[24] (Fig. 3©)改造, 而分组卷积是被当做一个工程折中方案设计出来的。
我们实验显示,聚合转换优于原本的ResNet模块,即使在保持计算复杂度和模型大小的受限条件下-如:图Figure 1(右) 被设计为保持与图Figure 1(左)的FLOPs复杂度和参数量大小。我们强调一下,通过增加容量(变得更深或更宽)来提升模型精度相对简单,提升精度同时保持(或减少)复杂度在文献中很少有。
我们的方法表明,基数(一组转换的数量)是除了宽度和高度之外具体的、可度量的维度,并且是核心重要的。实验证明增加基数是比变得更深或更宽更加有效的提升精度的方法,特别是当深度和宽度开始使现有模型的收益递减时。
我们的神经网络,称作ResNeXt(提出了下一个维度),在ImageNet分类数据集上优于ResNet-101/152 [14], ResNet200 [15], Inception-v3 [39], 和Inception-ResNet-v2 [37]。特别是一个101-层的ResNeXt能够达到比ResNet-200[15]更好的精度,但只有其50%的复杂度。而且,ResNeXt展示了相对所有Inception模型来说更简单的设计。ResNeXt 是我们在ILSVRC 2016分类任务中提交物的基础,获得了第二名。本文进一步在更大的ImageNet-5K数据集和COCO对象检测数据集[27]上评估ResNeXt,显示了比它对应的ResNet一致的、更好的精度。我们认为ResNeXt同样能够很好的泛化到其它视觉(和非视觉的)识别任务上。
2. 相关工作
多分支卷积网络
Inception模块[38,17,39,37]是成功的多分支架构,它的每个分支是精心定制的。ResNets[14]可以看做是一个二分支网络,其中一个分支是恒等映射。深度神经决策森林[22]是具有学习分裂功能的树状多分支网络。
分组卷积
分组卷积的使用可以追溯到AlexNet论文[24], 如果没有更早。Krizhevsky et al. [24]给出的动机是将模型分布到两个GPU上。Caffe [19], Torch [3], 和其它库都支持分组卷积,主要为了兼容AlexNet。据我们所知,很少有证据表明利用分组卷积来提高精度。分组卷积的一个特例是分通道卷积,这种情况下分组数就是通道数。分通道卷积是可分卷积[35]的一部分。
压缩卷积网络
分解(在空间[6,18]或通道[6,21,16]级别)是广泛采用的用于检测深度卷积网络冗余和加速/压缩它的技术。 Ioannou et al. [16] 提出"根"-模式网络来减少计算,根中的分支通过分组卷积实现。[6, 18, 21, 16]中的方法展示了精度和较低复杂度和较小模型大小的优雅折中。不同于压缩,我们的方法是在实验中显示更强的表达能力的一种架构。
集成
取一组独立训练网络的均值是一种提升精度[24]的有效解决方案, 在识别竞赛中被广泛采用。Veit et al. [40]将单个ResNets解释为浅层网络的一个集成,ResNet的结果来自于加法行为[15]。我们的方法使用附加的聚合一组转换。但是我们认为将我们的方法当做集成是不确切的,因为聚合在一起的成员是联合训练的,不是独立训练的。
3. 方法
3.1 模板

我们遵循VGG/ResNets,采用高度模块化设计。我们的网络包含一堆残差block,这些block有相同的拓扑,受VGG/ResNets启发,这些block满足两个简单规则:(i) 如果产生空间大小相同的特征图,这些block共享相同的超参(宽度和滤波器尺寸),(ii) 当空间特征图以因子2下采样时,block的宽度乘上因子2。第二条规则确保了计算复杂度,对于所有block而言FLOPs(在multiply-add中的浮点运算)大致相同。
有了这两个规则,我们只需要设计一个模板模块,网络中的所有模块都可以被相应地确定。因此,这两条规则大大缩小了设计空间,使得我们关注几个关键因素。根据这两条规则构建的网络见表Table(1)
3.2. 回顾简单神经元

人工神经网络最简单的神经元执行內积(加权求和), 是全连接层和卷积层执行基本转换。內积可以看做聚合转换的一种形式:
∑ i = 1 D w i x i (1) \sum_{i=1}^D w_ix_i \tag 1 i=1∑Dwixi(1)
其中 x = [ x 1 , x 2 , . . . , x D ] x = [x_1, x_2, ..., x_D] x=[x1,x2,...,xD] is a D-channel input vector to the neuron and wi is a filter’s weight for the i-th chan-nel. This operation (usually including some output nonlinearity) is referred to as a “neuron”. See Fig. 2.
其中 x = [ x 1 , x 2 , . . . , x D ] x = [x_1, x_2, ..., x_D] x=[x1,x2,...,xD] 是神经元的D通道输入向量, w i w_i wi 是滤波器第i个通道的权重。这个操作(通常包括一些非线性输出)被称为“神经元”。
上面的操作可以作为分割、转换和聚合的组合重新构建。(1)分割:向量 x x x 切片为一个低维嵌入,上面这个就是一个单维子空间 x i x_i xi ; (ii)转换:低维表示被转换,上面这个,它被简单缩放: w i x i w_ix_i wixi ; (iii)聚合:所有嵌入的转换通过 ∑ i = 1 D \sum_{i=1}^D ∑i=1D 聚合。
3.3. 聚合转换
分析了简单的神经元,我们考虑将基础的转换( w i x i w_ix_i wixi)替换为更通用的函数,函数本身可以是一个网络。与增加深度的“Network-in-Network” [26] 相比,我们展示了我们的“Network-in-Neuron”沿着一个新的维度扩展。
Formally, we present aggregated transformations as:
形式上,我们提出的聚合转换为:
KaTeX parse error: Undefined control sequence: \cal at position 2: \̲c̲a̲l̲ ̲F(x)= \sum_{i=0…
KaTeX parse error: Undefined control sequence: \cal at position 1: \̲c̲a̲l̲ ̲T_i(x) 可以是任意函数,类似一个简单神经元,KaTeX parse error: Undefined control sequence: \cal at position 1: \̲c̲a̲l̲ ̲T_i 投影x到一个嵌套(通常是低维的),然后转换它。
在等式(2)中C是需要聚合的一组转换大小,我们称C为基数[2]。C在等式(2)中的位置与D在等式(1)中类似,但是C不需要等于D,可以是任意数值。维度宽度与简单转换(内积)的数量有关,我们认为维度基数控制更复杂转换的数量。我们通过实验证明,基数是一个基本的维度,比宽度和深度(这两个维度)更有效。
本文中,我们考虑一个简单的方式设计转换函数:所有的KaTeX parse error: Undefined control sequence: \cal at position 1: \̲c̲a̲l̲ ̲T_i 有相同的拓扑,这扩展了重复相同形状的层的VGG-style策略, 这有助于隔离一些因素并扩展转换数量到任意大。如图Figure 1(右)描绘的,我们将单个转换KaTeX parse error: Undefined control sequence: \cal at position 1: \̲c̲a̲l̲ ̲T_i设置为bottleneck形状的架构[14]。这种情况下,KaTeX parse error: Undefined control sequence: \cal at position 1: \̲c̲a̲l̲ ̲T_i 中第一个 1 × 1 1 \times 1 1×1 的层产生低维嵌入。
等式(2)中的聚合转换充当残差函数[14] (图Figure 1右):
KaTeX parse error: Undefined control sequence: \cal at position 2: \̲c̲a̲l̲ ̲y=x+\sum_{i=1}^…
y是输出。
与Inception-ResNet的关系.

一些张量操作表明,图Figure 1(右)中的模块(如图Figure 3(a)所示)与图Figure 3(b)等价。图Figure 3(b)与inception-resnet[37] block类似,因为它涉及到残差函数的分支和连接。但是不同于所有Inception或Inception-ResNet模块,我们在多个路径之间共享相同的拓扑。我们的模块需要最少的额外工作来设计每个路径。
与分组卷积的关系.
使用分组卷积[24]的符号,上面的模块变得更加简洁;图Figure 3©显示了这种重构。所有的低维嵌入(第一个1×1层)可以用一个更宽的层(例如,在图Figure 3 ©中1×1,128维)替换。分割基本上是由分组卷积层在将输入通道划分为组时完成的。图Figure 3©中分组的卷积层执行32组输入和输出通道为4维的卷积。分组的卷积层将它们连接到一起作为层的输出。图Figure 3©中的block与图Figure 1(左)中的bottlenetck块相似,除了图3©是一个更宽的、稀疏的连接模块。
我们注意到重构产生非凡的拓扑只有block的深度≥3;如果块的深度为2(如[14]中基本block), 重构就变成一个普通的宽的、密集模块了;见图Figure 4中的描绘。
讨论.
我们注意到,尽管我们提出了显示连接(图Figure 3(b))或分组卷积(图Figrue 3©)的重构方式,但这种重构对公式(3)一般形式不总是合适的,如果变换KaTeX parse error: Undefined control sequence: \cal at position 1: \̲c̲a̲l̲ ̲T_i是任意形式的并且是异构的。在本文中,我们选择使用同构形式,因为它们更简单,并且可扩展。在这种简化的情况下,以图Figure 3©中分组卷积的形式有助于简化实现。
3.4. 模型容量
下一节的实验会展示,我们的模型在保持模型复杂度和参数量时提升了精度。这不仅在实践中很有趣,而且更重要的是,复杂度和参数量 代表了模型的固有容量,因此常常被作为深网络的基本特性来研究[8].
当我们在保持复杂度的同时评估不同的基数C时,我们希望最小化对其它超参数的修改。我们选择调整bottleneck的宽度(例如图Figure 1(右)中的4维),因为它可以从块的输入和输出隔离出来。这种策略不会改变其他超参数(block的深度或输入/输出宽度),因此有助于我们聚焦基数的影响。
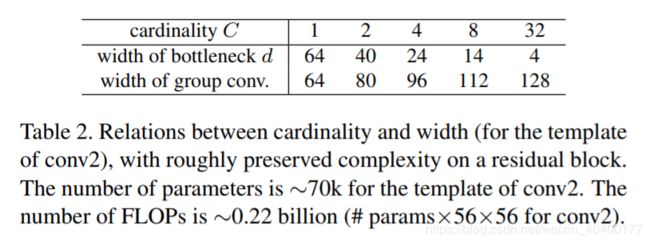
在图1(左),原ResNet bottleneck block[14] 有 256 ∗ 64 + 3 ∗ 3 ∗ 64 ∗ 64 + 64 ∗ 256 ≈ 70 k 256*64 + 3 * 3 * 64 * 64 + 64 * 256≈70 k 256∗64+3∗3∗64∗64+64∗256≈70k参数和成比例FLOPs(在同一特征图大小)。在bottleneck宽度为d的情况下,我们图Figure 1(右)的模板有:
C ∗ ( 256 ∗ d + 3 ∗ 3 ∗ d ∗ d + d ∗ 256 ) (4) C*(256*d + 3*3*d*d + d*256) \tag 4 C∗(256∗d+3∗3∗d∗d+d∗256)(4)
参数和成比例FLOPs。当C = 32和d = 4 ,等式(4)约有70k。表Table 2显示了基数C和bottleneck宽度d之间的关系。
因为我们采用了3.1小节中的两条规则,所以上面的近似等式在ResNet bottle block和我们的ResNeXt的所有阶段(除了下采样层,特征图的尺寸有变化)是有效的。
4. 实现细节
我们的实现遵循[14]和开源的fb.resnet.torch [11]代码。在ImageNet数据集上,输入图像是224×224,随机地从调整尺寸后的图像裁剪得到,这些调整大小的图片来自使用由[11]实现的[38]中的用缩放和长宽比做数据增广。shotcuts是恒等连接,除了那些增加的维度是投影([14]中的类型B)。如[11]中建议,conv3、4和5的下采样是通过每个stage中第一block的步长为2的 3 × 3 3 \times 3 3×3 卷积层完成的;使用SGD, 256的mini-batch在8个GPUs上(每个GPU32个样本);权重衰减为0.0001,动量大小为0.9。初始学习率为0.1,按照[11]中的计划做3次除以10;采用[13]中的权重初始化策略。在所有的消融比较中,我们在单个$224 \times 224 $ 的裁剪图像上进行错误评估,这个图像从短边为256的图像中心裁剪而来。
我们的模型以图Figure 3©的形式实现, 在图Figure 3©中卷积之后,我们执行批标准化(BN)[17],在每个BN后执行ReLU,除了block的输出部分,遵循[14]:ReLU在添加到shortcut之后才执行。
我们注意到,当BN和ReLU合适的放置,图Figure 3中的三种形式是严格等价的。我们训练了所有的三种形式,获得了相同的结果。我们选择图Figure . 3©实现,因为它更加简洁,并且比其它两种形式更快。
5. 实验
5.1. ImageNet-1K上实验
我们在1000类ImageNet分类任务[33]上进行消融实验,遵循[14],构建了50层和101层的残差网络,简单的将ResNet-50/101中所有的block替换为我们的block。
标记.
因为我们采用了3.1节中的两条规则,通过模板就足以说明一个架构了(因为所有的block都是一个逻辑)。例如,表Table 1显示了由基数= 32和bottleneck宽度= 4d的模板构建的ResNeXt-50(图Figure 3),这个网络简化地记做ResNeXt-50 (32×4d)。我们注意到模板的输入/输出宽度固定为256-d(图Figure 3), 且每次对feature map进行下采样时,所有宽度都翻倍(见表Table 1)。
基数 vs. 宽度.

如表Table 2所示,我们首先在的保持复杂度的情况下,评估基数C和bottleneck宽度之间的权衡,表Table 3 展示了结果,图Figure 5展示了error vs. epochs的曲线。与ResNet-50对比(表Table 3顶部和图Figure 5左侧),32×4d ResNeXt-50验证误差为22.2%,比ResNet基线的23.9%低1.7%。保持复杂度,随着基数C从1增加到32,错误率不断降低。此外,32×4 d ResNeXt也比ResNet同行低得多的训练误差,说明性能提升不是来自正则化,而是来源于更强的表达能力。

在resnet - 101(图Figure5 右边,表Table 3底部)下也观察到类似的趋势,其中32×4d ResNeXt101优于resnet- 101 0.8%。虽然这种验证误差的提升比50层的情况要小,但是训练误差的提升任然是很大的(resnet-101 20%,32×4d resnext-101 16%,图Figure 5右边)。事实上,更多的训练数据将扩大验证误差的差距,如我们在下一小节中的ImageNet-5K集中所展示的那样。
表3还表明,保持复杂度,当bottleneck宽度很小时,以减少宽度为代价的增加基数开始显示精度饱和(不再提升)。我们认为,在这种权衡中继续减少宽度是不值得的,因此,我们在下面采用一个不小于4d的bottleneck宽度。
增加基数 vs. 更深/更宽.
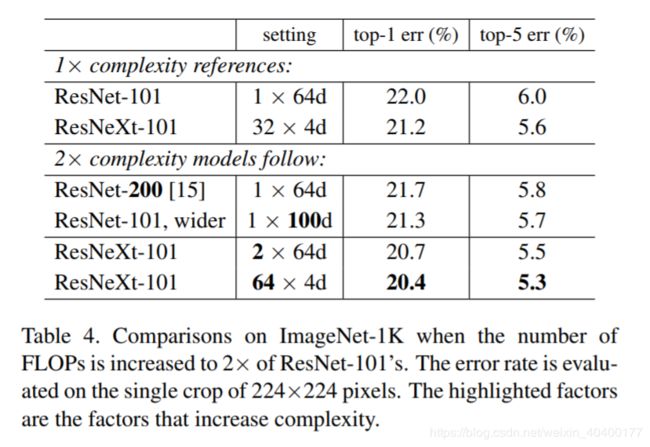
接下来,我们研究通过增加基数C或增加深度或宽度来增加复杂度。下面的比较也可以被视为关于2倍FLOPS resnet-101的基线; 我们比较有∼150亿FLOPs的如下几个变种。(i)深度加到200层,我们采用了在[11]中实现的ResNet-200[15]。(ii)通过增加bottleneck宽度来变宽。(iii)通过将C加倍来增加基数。
表Table 4表明相对ResNet-101基线误差(22.%),复杂度加倍误差会一致减少;但是更深(ResNet200,提升0.3%)或更宽(更宽的ResNet-101,提升0.7%)时,提升很小。
相反,增加基数C比更深或更宽结果要好得多,2×64d ResNeXt-101将top-1误差减少1.3%到达20.7%; The 64×4d ResNeXt-101误差减小到20.4%。
同样注意到32×4d ResNet-101 (21.2%)比更深的ResNet-200 和更宽的ResNet101表现更好,虽然只有它们50%的复杂度。这再次表明,基数是比深度和宽度 更有效的维度。
残差连接

上表说明残差(shortcut)连接的影响:从ResNeXt-50删除shortcut将错误增加3.9个点,至26.1%。删除ResNet-50的shotcut要糟糕得多(31.2%)。这些比较表明,残差连接有助于优化,而聚合转换是更强的表示,因为它们的性能始终优于有或没有残差连接的对应的副本。
性能
为了简单起见,我们使用Torch的内置分组卷积实现,没有特别的优化。我们注意到这个实现是暴力的(brute-force),不支持并行。在8块 NVIDIA M40 GPU上训练表Table 3所示的32×4d ResNeXt-101 每个mini-batch耗时0.95秒,对比ResNet-101 baseline耗时0.70s,FLOPs相当;我们认为这是合理的开销。我们认为经过精心设计的较低级别的实现(例如 CUDA)能够减少这种开销。我们还认为cpu上的推断时间会减少开销。训练2倍复杂度模型(64×4 d resnext - 101)需要1.7秒/mini-batch和一共10天在8块GPU上。
与state-of-the-art结果比较
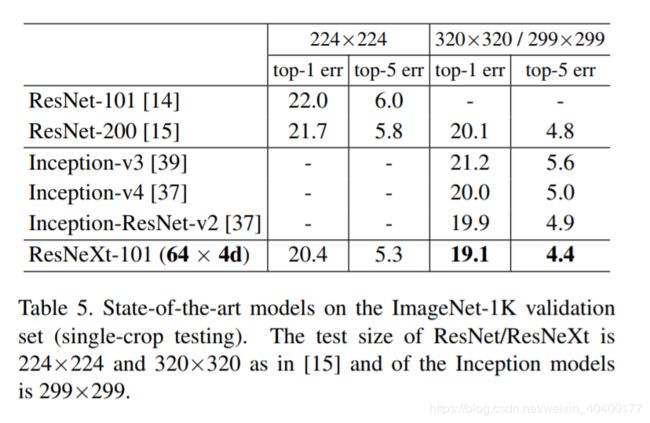
表Table 5显示了在ImageNet验证集上进行单裁剪测试的更多结果。除了测试一个224×224裁剪,我们也遵循[15]评估320×320裁剪。我们的结果优于ResNet、Inception-v3/v4和Inception-ResNet-v2,到达单裁剪top-5的错误率4.4%。此外,我们的架构设计比所有的Inception模型都要简单得多,并且需要手工设置的超参数要少得多。
ResNeXt是我们参加ILSVRC 2016分类任务的基础,我们获得了第二名。 我们注意到,许多模型(包括我们的)在使用多尺度和/或多裁剪测试后开始饱和。使用[14]中的多尺度密集测试,我们得到了一个单模型的top-1/top-5错误率为17.7%/3.7%,与采用多尺度、多裁剪测试的inception-resnet-v2的单模型结果为17.8%/3.7%。在测试集中,我们的集成模型top-5得错误率为3.03%,与获胜者的2.99%和Inception-v4/InceptionResNet-v2的3.08%[37]相当。
5.2. ImageNet-5K实验

ImageNet-1K上的性能似乎饱和了,但我们认为,这不是因为模型的能力,而是因为数据集的复杂度。接下来,我们在一个较大的ImageNet子集上评估模型,这个子集有5000个类别。
我们的5K数据集是完整的ImageNet-22K集[33]的一个子集,这5000个类别包括原始的ImageNet1K中的类别和在完整的ImageNet数据集中具有最多图像数量的额外4000个类别。5k数据集有680万图片,大约5倍于1k数据集。没有官方可用的train/val分割,所以我们选择在原始的ImageNet-1K验证集上评估。在这个1k类val集上,预测时,模型可以被当做 一个5k类分类任务(所有预测为其他4K类的标签都自动认为错误);或一个1K类分类任务(softmax只应用于1K类)来评估

实现细节与节4一样,5K训练模型从头开始训练,跟1K 训练模型一样的mini-batch数(这样epochs就只有1/5)。表Table 6和图Figure 6展示了在保持复杂度情况下的比较。ResNeXt-50比ResNet-50减少5K类 top-1错误3.2%,ResNetXt-101比ResNet-101减少5K类 top-1误差2.3%,在1k类误差上也观察到类似的差距,这些表明ResNeXt具有更强的表示能力。
此外,在验证集上评估相同的1K类分类任务,我们发现在5K集上训练的模型(在表Table 6中有1K类error 22.2%/5.7%)与在1K集(表Table 3中为21.2%/5.6%)上训练相比,表现出竞争力。此结果并没有增加训练时间(由于相同的mini-batch数量),也没有微调。我们认为这是一个有希望的结果,因为5K类的分类训练任务是一个更具挑战性的任务。
5.3. CIFAR实验
我们在CIFAR-10和100数据集[23]上进行了更多的实验,我们使用[14]中的架构,使用bottleneck模板 [ 1 × 1 , 64 3 × 3 , 64 1 × 1 , 256 ] \left[1 \times1, 64 \\ 3 \times3,64 \\ 1 \times 1, 256 \right] [1×1,643×3,641×1,256] 替换了基础残差block;我们的网络从一个 3 × 3 3 \times 3 3×3 的卷积层开始,接着是3阶段,每个阶段有3个残差block。我们采用与[14]相同的平移和翻转做数据增广,实现的细节在附录中。
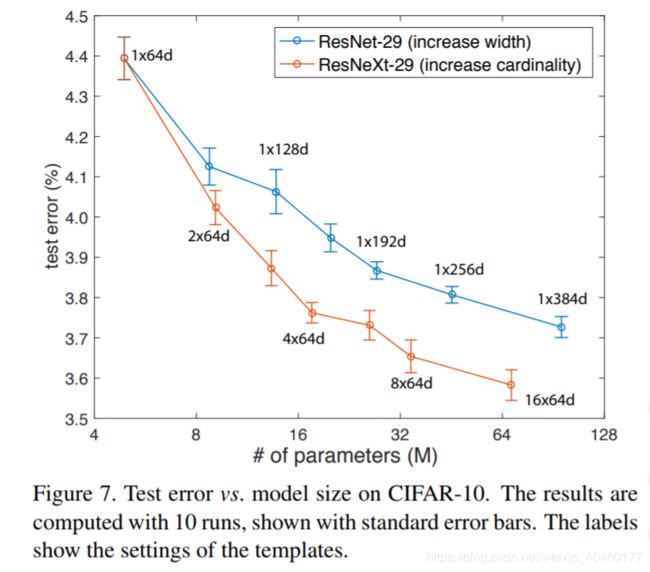
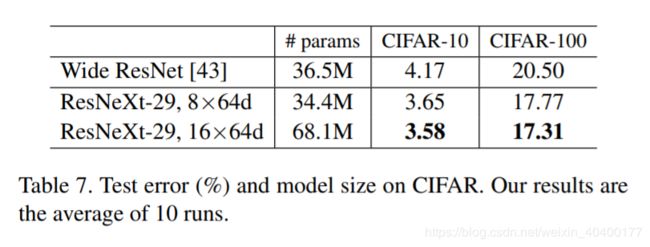
我们比较了两种基于以上基线的增加复杂度情况:(i) 增加基数,固定宽度,(ii) 增加bottleneck的宽度,固定基数=1。在这种改变下,我们训练和评估一系列的网络。图Figure 7显示了测试错误率与模型大小的比较; 我们发现增加基数比增加宽度更有效,这与我们在ImageNet-1K上观察到的一致。表Table 7显示与有最好的发布记录的宽ResNet[43]比较的结果和模型大小;我们的模型大小相似(34.4M),结果比宽ResNet更好。我们较大的模型在cifar 10上达到3.58%的测试错误率(10次运行平均结果),在cifar 100上达到17.31%。据我们所知,这些是文献中最好的结果(具有类似的数据增强),包括未发表的技术报告在内。
5.4. COCO目标检测实验
接下来,我们在COCO目标检测数据集[27]上评估模型的泛化能力。遵循[1], 我们在80k训练集和35k val子集上训练模型,然后在5k val子集(称为minival)上进行评估。我们评估COCO类平均精度 (AP)和AP@IoU=0.5 [27]。我们采用基本的Faster R-CNN[32],并遵循[14]将ResNet/ResNeXt插入其中。模型在ImageNet-1K上进行预训练,并在检测集上进行微调,实现细节在附录中。
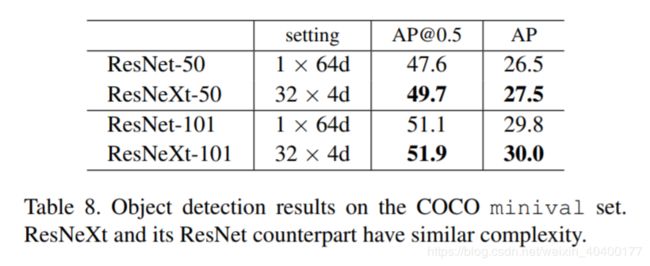
表8显示了比较结果,在50-层基线上,ResNeXt在不增加复杂度的情况下,将[email protected]和AP分别提高2.1%和1.0%。ResNeXt在101层基线上显示了较小的提升。我们推测更多的训练数据会有更大的差距,正如在ImageNet-5K集上观察到的。值得注意的是,最近ResNeXt应用到Mask R-CNN[12]中,在实例分割和目标检测任务得到了最好结果。
A. 实现细节: CIFAR
我们在50k训练集中训练模型,在10k测试集中评估。遵循[14],输入图像为32×32,从大小为40×40的零填充图像或其翻转中随机裁剪而来,没有使用其他的数据增广。第一层是 3 × 3 3 \times 3 3×3 的卷积层,有64个滤波器;还有3个阶段,每个阶段有3个残差block,每个阶段[14]输出特征图的大小分别为32,16,8;网络以一个全局平均池化和全连接层结束。如节3.1一样,阶段改变(下采样)时宽度加倍。模型在8个gpu上进行训练,每个mini-batch大小为128,重量衰减为0.0005,动量为0.9。我们从0.1的学习率开始,对模型进行300轮的训练,在150轮和225轮减少学习率,其它的实现细节如[11]。
B. 实现细节: 目标检测
我们采用Faster R-CNN系统[32],为了简单起见,在RPN和Fast R-CNN之间没有共享特征。在RPN步骤中,我们在8个GPU上进行训练,每个GPU每个mini-batch处理2张图像,每个图像有256个锚点(anchors)。在RPN训练步骤中,我们以0.02学习率训练120k个mini-batch,然后以0.002的学习率训练接下来60k个mini-batch。在Fast R-CNN训练步骤中,我们以0.005学习率训练120k个mini-batch,然后以0.0005的学习率训练接下来60k个mini-batch,我们使用0.0001的权重衰减和0.9的动量大小。其它实现细节如https://github.com/rbgirshick/py-faster-rcnn.
参考
[1] S. Bell, C. L. Zitnick, K. Bala, and R. Girshick. Insideoutside net: Detecting objects in context with skip
pooling and recurrent neural networks. In CVPR, 2016.
[2] G. Cantor. Uber unendliche, lineare punktmannich-faltigkeiten, arbeiten zur mengenlehre aus den jahren 1872-1884. 1884.
[3] R. Collobert, S. Bengio, and J. Mariethoz. Torch: a modular machine learning software library. Technical
report, Idiap, 2002.
[4] A. Conneau, H. Schwenk, L. Barrault, and Y. Lecun. Very deep convolutional networks for natural language processing. arXiv:1606.01781, 2016.
[5] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection. In CVPR, 2005.
[6] E. Denton, W. Zaremba, J. Bruna, Y. LeCun, and R. Fergus. Exploiting linear structure within convolutional networks for efficient evaluation. In NIPS, 2014.
[7] J. Donahue, Y. Jia, O. Vinyals, J. Hoffman, N. Zhang, E. Tzeng, and T. Darrell. Decaf: A deep convolutional
activation feature for generic visual recognition. In ICML, 2014.
[8] D. Eigen, J. Rolfe, R. Fergus, and Y. LeCun. Understanding deep architectures using a recursive convolutional network. arXiv:1312.1847, 2013.
[9] R. Girshick. Fast R-CNN. In ICCV, 2015.
[10] R. Girshick, J. Donahue, T. Darrell, and J. Malik. Rich feature hierarchies for accurate object detection and semantic segmentation. In CVPR, 2014.
[11] S. Gross and M. Wilber. Training and investigating Residual Nets. https://github.com/facebook/fb.resnet.torch, 2016.
[12] K. He, G. Gkioxari, P. Dollar, and R. Girshick. Mask R-CNN. arXiv:1703.06870, 2017.
[13] K. He, X. Zhang, S. Ren, and J. Sun. Delving deep into rectifiers: Surpassing human-level performance on imagenet classification. In ICCV, 2015.
[14] K. He, X. Zhang, S. Ren, and J. Sun. Deep residual learning for image recognition. In CVPR, 2016.
[15] K. He, X. Zhang, S. Ren, and J. Sun. Identity mappings in deep residual networks. In ECCV, 2016.
[16] Y. Ioannou, D. Robertson, R. Cipolla, and A. Criminisi. Deep roots: Improving cnn efficiency with hierarchical filter groups. arXiv:1605.06489, 2016.
[17] S. Ioffe and C. Szegedy. Batch normalization: Accelerating deep network training by reducing internal
covariate shift. In ICML, 2015.
[18] M. Jaderberg, A. Vedaldi, and A. Zisserman. Speeding up convolutional neural networks with low rank
expansions. In BMVC, 2014.
[19] Y. Jia, E. Shelhamer, J. Donahue, S. Karayev, J. Long, R. Girshick, S. Guadarrama, and T. Darrell. Caffe:Convolutional architecture for fast feature embedding. arXiv:1408.5093, 2014.
[20] N. Kalchbrenner, L. Espeholt, K. Simonyan, A. v. d. Oord, A. Graves, and K. Kavukcuoglu. Neural machine translation in linear time. arXiv:1610.10099, 2016.
[21] Y.-D. Kim, E. Park, S. Yoo, T. Choi, L. Yang, and D. Shin. Compression of deep convolutional neural networks for fast and low power mobile applications. In ICLR, 2016.
[22] P. Kontschieder, M. Fiterau, A. Criminisi, and S. R. Bulo. Deep convolutional neural decision forests. In ICCV, 2015.
[23] A. Krizhevsky. Learning multiple layers of features from tiny images. Tech Report, 2009.
[24] A. Krizhevsky, I. Sutskever, and G. Hinton. Imagenet classification with deep convolutional neural networks. In NIPS, 2012.
[25] Y. LeCun, B. Boser, J. S. Denker, D. Henderson, R. E. Howard, W. Hubbard, and L. D. Jackel. Backpropagation applied to handwritten zip code recognition. Neural computation, 1989.
[26] M. Lin, Q. Chen, and S. Yan. Network in network. In ICLR, 2014.
[27] T.-Y. Lin, M. Maire, S. Belongie, J. Hays, P. Perona, D. Ramanan, P. Dollar, and C. L. Zitnick. Microsoft COCO: Common objects in context. In ECCV. 2014.
[28] J. Long, E. Shelhamer, and T. Darrell. Fully convolutional networks for semantic segmentation. In CVPR, 2015.
[29] D. G. Lowe. Distinctive image features from scaleinvariant keypoints. IJCV, 2004.
[30] A. Oord, S. Dieleman, H. Zen, K. Simonyan, O. Vinyals, A. Graves, N. Kalchbrenner, A. Senior, and K. Kavukcuoglu. Wavenet: A generative model for raw audio. arXiv:1609.03499, 2016.
[31] P. O. Pinheiro, R. Collobert, and P. Dollar. Learning to segment object candidates. In NIPS, 2015.
[32] S. Ren, K. He, R. Girshick, and J. Sun. Faster RCNN: Towards real-time object detection with region proposal networks. In NIPS, 2015.
[33] O. Russakovsky, J. Deng, H. Su, J. Krause, S. Satheesh, S. Ma, Z. Huang, A. Karpathy, A. Khosla, M. Bernstein, A. C. Berg, and L. Fei-Fei. ImageNet Large Scale Visual Recognition Challenge. IJCV, 2015.
[34] P. Sermanet, D. Eigen, X. Zhang, M. Mathieu, R. Fergus, and Y. LeCun. Overfeat: Integrated recognition, localization and detection using convolutional networks. In ICLR, 2014.
[35] L. Sifre and S. Mallat. Rigid-motion scattering for texture classification. arXiv:1403.1687, 2014.
[36] K. Simonyan and A. Zisserman. Very deep convolutional networks for large-scale image recognition. In ICLR, 2015.
[37] C. Szegedy, S. Ioffe, and V. Vanhoucke. Inceptionv4, inception-resnet and the impact of residual connections on learning. In ICLR Workshop, 2016.
[38] C. Szegedy, W. Liu, Y. Jia, P. Sermanet, S. Reed, D. Anguelov, D. Erhan, V. Vanhoucke, and A. Rabinovich. Going deeper with convolutions. In CVPR, 2015.
[39] C. Szegedy, V. Vanhoucke, S. Ioffe, J. Shlens, and Z. Wojna. Rethinking the inception architecture for computer vision. In CVPR, 2016.
[40] A. Veit, M. Wilber, and S. Belongie. Residual networks behave like ensembles of relatively shallow network. In NIPS, 2016.
[41] Y. Wu, M. Schuster, Z. Chen, Q. V. Le, M. Norouzi, W. Macherey, M. Krikun, Y. Cao, Q. Gao, K. Macherey, et al. Google’s neural machine translation system: Bridging the gap between human and machine translation. arXiv:1609.08144, 2016.
[42] W. Xiong, J. Droppo, X. Huang, F. Seide, M. Seltzer, A. Stolcke, D. Yu, and G. Zweig. The Microsoft 2016 Conversational Speech Recognition System. arXiv:1609.03528, 2016.
[43] S. Zagoruyko and N. Komodakis. Wide residual networks. In BMVC, 2016.
[44] M. D. Zeiler and R. Fergus. Visualizing and understanding convolutional neural networks. In ECCV, 2014.