八、编写并运行简单的服务器和客户端 (C++)
编写并运行简单的服务器和客户端 (C++)
文章目录
- 编写Service节点
- 代码
- 解析
- 编写Client节点
- 代码
- 解析
- 编译节点
- 运行
- 运行Service
- 运行Client
- Error处理
原文自——
Writing a Simple Service and Client (C++)
Writing a Simple Service and Client (Python)
Examining the Simple Service and Client
python可以参考原文。
这篇文章基本是copy官方教程,自己完成测试使用,并在文中添加部分见解,原版请参考上边的链接。
编写Service节点
这里,我们将创建一个简单的service节点(“add_two_ints_server”),该节点将接收到两个整形数字,并返回它们的和。
进入先前你在catkin workspace教程中所创建的beginner_tutorials包所在的目录:
cd ~/catkin_ws/src/beginner_tutorials
请确保已经按照六、创建ROS消息和ROS服务教程的步骤创建了本教程所需要的srv(确保选择了对应的编译系统“catkin”和“rosbuild”)。
代码
在beginner_tutorials包中创建src/add_two_ints_server.cpp文件,并复制粘贴下面的代码:
#include "ros/ros.h"
#include "beginner_tutorials/AddTwoInts.h"
bool add(beginer_tutorials::AddTwoInts::Request &req,
beginer_tutorials::AddTwoInts::Response &res)
{
res.sum = req.a + req.b;
ROS_INFO("request: x=%ld, y=%ld", (long int)req.a, (long int)req.b);
ROS_INFO("sending back response: [%ld]", (long int)res.sum);
return true;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "add_two_ints_server");
ros::NodeHandle n;
ros::ServiceServer service = n.advertiseService("add_two_ints", add);
ROS_INFO("Ready to add two ints.");
ros::spin();
return 0;
}
解析
现在,让我们来逐步分析代码。
#include "ros/ros.h"
#include "beginer_tutorials/AddTwoInts.h"
beginner_tutorials/AddTwoInts.h是由编译系统自动根据我们先前创建的srv文件生成的对应该srv文件的头文件。
bool add(beginer_tutorials::AddTwoInts::Request &req,
beginer_tutorials::AddTwoInts::Response &res)
这个函数提供两个int值求和的服务,int值从request里面获取,而返回数据装入response内,这些数据类型都定义在srv文件内部,函数返回一个boolean值。
{
res.sum = req.a + req.b;
ROS_INFO("request: x=%ld, y=%ld", (long int)req.a, (long int)req.b);
ROS_INFO("sending back response: [%ld]", (long int)res.sum);
return true;
}
现在,两个int值已经相加,并存入了response。然后一些关于request和response的信息被记录下来。最后,service完成计算后返回true值。
ros::ServiceServer service = n.advertiseService("add_two_ints", add);
这里,service已经建立起来,并在ROS内发布出来。
编写Client节点
代码
在beginner_tutorials包中创建src/add_two_ints_client.cpp文件,并复制粘贴下面的代码:
#include "ros/ros.h"
#include "beginner_tutorials/AddTwoInts.h"
#include 解析
现在,让我们来逐步分析代码。
ros::ServiceClient client = n.serviceClient<beginer_tutorials::AddTwoInts>("add_two_ints");
这段代码为add_two_ints service创建一个client。ros::ServiceClient 对象待会用来调用service。
beginner_tutorials::AddTwoInts srv;
srv.request.a = atoll(argv[1]);
srv.request.b = atoll(argv[2]);
这里,我们实例化一个由ROS编译系统自动生成的service类,并给其request成员赋值。一个service类包含两个成员request和response。同时也包括两个类定义Request和Response。
if (client.call(srv))
这段代码是在调用service。由于service的调用是模态过程(调用的时候占用进程阻止其他代码的执行),一旦调用完成,将返回调用结果。如果service调用成功,call()函数将返回true,srv.response里面的值将是合法的值。如果调用失败,call()函数将返回false,srv.response里面的值将是非法的。
编译节点
再来编辑一下beginner_tutorials里面的CMakeLists.txt,文件位于~/catkin_ws/src/beginner_tutorials/CMakeLists.txt,并将下面的代码添加在文件末尾:
add_executable(add_two_ints_server src/add_two_ints_server.cpp)
target_link_libraries(add_two_ints_server ${catkin_LIBRARIES})
add_dependencies(add_two_ints_server beginner_tutorials_gencpp)
add_executable(add_two_ints_client src/add_two_ints_client.cpp)
target_link_libraries(add_two_ints_client ${catkin_LIBRARIES})
add_dependencies(add_two_ints_client beginner_tutorials_gencpp)
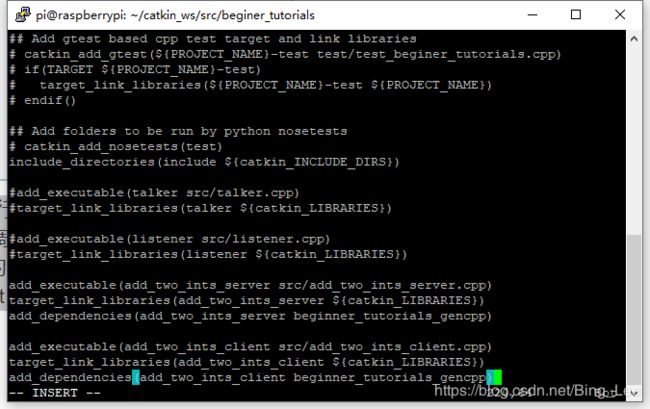
这段代码将生成两个可执行程序"add_two_ints_server"和"add_two_ints_client",这两个可执行程序默认被放在你的devel space下的包目录下,默认为~/catkin_ws/devel/lib/share/。你可以直接调用可执行程序,或者使用rosrun命令去调用它们。它们不会被装在/bin目录下,因为当你在你的系统里安装这个包的时候,这样做会污染PATH变量。如果你希望在安装的时候你的可执行程序在PATH变量里面,你需要设置一下install target,请参考:catkin/CMakeLists.txt
关于CMakeLists.txt文件更详细的描述请参考:六、创建ROS消息和ROS服务
现在运行catkin_make命令:
# In your catkin workspace
cd ~/catkin_ws
catkin_make

如果你的编译过程因为某些原因而失败:
- 确保你已经依照先前的创建ROS消息和ROS服务教程里的步骤完成操作。
现在你已经学会如何编写简单的服务器 Service 和客户端 Client,开始测试简单的Service和Client吧。
运行
本片博文使用c++所以下述运行均只需执行c++版的命令
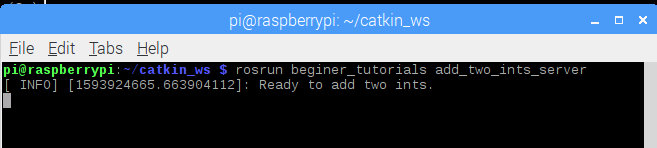
运行Service
我们先运行Service(注意在运行前先运行roscore):
$ rosrun beginner_tutorials add_two_ints_server (C++)
$ rosrun beginner_tutorials add_two_ints_server.py (Python)
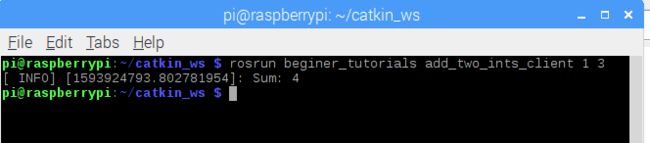
运行Client
$ rosrun beginner_tutorials add_two_ints_client 1 3 (C++)
$ rosrun beginner_tutorials add_two_ints_client.py 1 3 (Python)
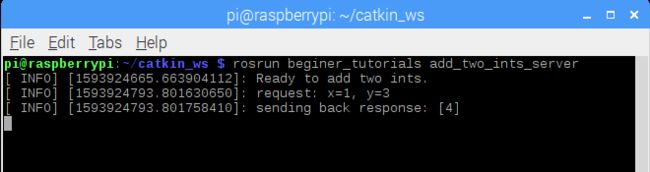
这时Service也会有更新,如下所示:
Error处理
- 如下错误
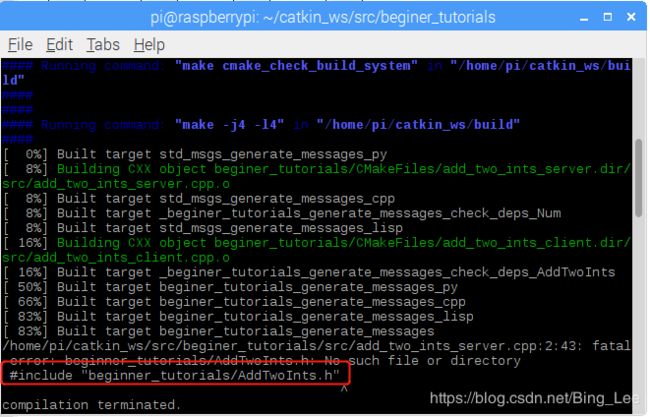
检查AddTwoInts.h文件是否在beginer_tutrials文件下。
- 若无法自动补全文件
请记得执行source devel/setup.bash,更新路径。