OpenPose 基于OpenCV DNN 的单人姿态估计
原文: OpenPose 基于OpenCV DNN 的单人姿态估计 - AIUAI
OpenCV4.0 版本以后可以直接读取 Caffe、TensorFlow、ONNX 等模型的 API,直接采用OpenCV 的 DNN 模块即可.
这里主要测试下基于 DNN 模块和 OpenPose 模型的单人人体姿态估计的具体实现.
Github 项目 - OpenPose 关键点输出格式 - AIUAI
Github 项目 - OpenPose Python API - AIUAI
Github 项目 - OpenPose 模型与Demos - AIUAI
OpenPose 人体姿态模型下载路径:
BODY25: http://posefs1.perception.cs.cmu.edu/OpenPose/models/pose/body_25/pose_iter_584000.caffemodel
COCO: http://posefs1.perception.cs.cmu.edu/OpenPose/models/pose/coco/pose_iter_440000.caffemodel
MPI: http://posefs1.perception.cs.cmu.edu/OpenPose/models/pose/mpi/pose_iter_160000.caffemodel
具体完整代码为:
#!/usr/bin/python3
#!--*-- coding: utf-8 --*--
from __future__ import division
import cv2
import time
import numpy as np
import matplotlib.pyplot as plt
import os
class general_pose_model(object):
def __init__(self, modelpath, mode="BODY25"):
# 指定采用的模型
# Body25: 25 points
# COCO: 18 points
# MPI: 15 points
self.inWidth = 368
self.inHeight = 368
self.threshold = 0.1
if mode == "BODY25":
self.pose_net = self.general_body25_model(modelpath)
elif mode == "COCO":
self.pose_net = self.general_coco_model(modelpath)
elif mode == "MPI":
self.pose_net = self.get_mpi_model(modelpath)
def get_mpi_model(self, modelpath):
self.points_name = {
"Head": 0, "Neck": 1,
"RShoulder": 2, "RElbow": 3, "RWrist": 4,
"LShoulder": 5, "LElbow": 6, "LWrist":
7, "RHip": 8, "RKnee": 9, "RAnkle": 10,
"LHip": 11, "LKnee": 12, "LAnkle": 13,
"Chest": 14, "Background": 15 }
self.num_points = 15
self.point_pairs = [[0, 1], [1, 2], [2, 3],
[3, 4], [1, 5], [5, 6],
[6, 7], [1, 14],[14, 8],
[8, 9], [9, 10], [14, 11],
[11, 12], [12, 13]
]
prototxt = os.path.join(
modelpath,
"pose/mpi/pose_deploy_linevec_faster_4_stages.prototxt")
caffemodel = os.path.join(
modelpath,
"pose/mpi/pose_iter_160000.caffemodel")
mpi_model = cv2.dnn.readNetFromCaffe(prototxt, caffemodel)
return mpi_model
def general_coco_model(self, modelpath):
self.points_name = {
"Nose": 0, "Neck": 1,
"RShoulder": 2, "RElbow": 3, "RWrist": 4,
"LShoulder": 5, "LElbow": 6, "LWrist": 7,
"RHip": 8, "RKnee": 9, "RAnkle": 10,
"LHip": 11, "LKnee": 12, "LAnkle": 13,
"REye": 14, "LEye": 15,
"REar": 16, "LEar": 17,
"Background": 18}
self.num_points = 18
self.point_pairs = [[1, 0], [1, 2], [1, 5],
[2, 3], [3, 4], [5, 6],
[6, 7], [1, 8], [8, 9],
[9, 10], [1, 11], [11, 12],
[12, 13], [0, 14], [0, 15],
[14, 16], [15, 17]]
prototxt = os.path.join(
modelpath,
"pose/coco/pose_deploy_linevec.prototxt")
caffemodel = os.path.join(
modelpath,
"pose/coco/pose_iter_440000.caffemodel")
coco_model = cv2.dnn.readNetFromCaffe(prototxt, caffemodel)
return coco_model
def general_body25_model(self, modelpath):
self.num_points = 25
self.point_pairs = [[1, 0], [1, 2], [1, 5],
[2, 3], [3, 4], [5, 6],
[6, 7], [0, 15], [15, 17],
[0, 16], [16, 18], [1, 8],
[8, 9], [9, 10], [10, 11],
[11, 22], [22, 23], [11, 24],
[8, 12], [12, 13], [13, 14],
[14, 19], [19, 20], [14, 21]]
prototxt = os.path.join(
modelpath,
"pose/body_25/pose_deploy.prototxt")
caffemodel = os.path.join(
modelpath,
"pose/body_25/pose_iter_584000.caffemodel")
coco_model = cv2.dnn.readNetFromCaffe(prototxt, caffemodel)
return coco_model
def predict(self, imgfile):
img_cv2 = cv2.imread(imgfile)
img_height, img_width, _ = img_cv2.shape
inpBlob = cv2.dnn.blobFromImage(img_cv2,
1.0 / 255,
(self.inWidth, self.inHeight),
(0, 0, 0),
swapRB=False,
crop=False)
self.pose_net.setInput(inpBlob)
self.pose_net.setPreferableBackend(cv2.dnn.DNN_BACKEND_OPENCV)
self.pose_net.setPreferableTarget(cv2.dnn.DNN_TARGET_OPENCL)
output = self.pose_net.forward()
H = output.shape[2]
W = output.shape[3]
print(output.shape)
# vis heatmaps
self.vis_heatmaps(img_file, output)
#
points = []
for idx in range(self.num_points):
probMap = output[0, idx, :, :] # confidence map.
# Find global maxima of the probMap.
minVal, prob, minLoc, point = cv2.minMaxLoc(probMap)
# Scale the point to fit on the original image
x = (img_width * point[0]) / W
y = (img_height * point[1]) / H
if prob > self.threshold:
points.append((int(x), int(y)))
else:
points.append(None)
return points
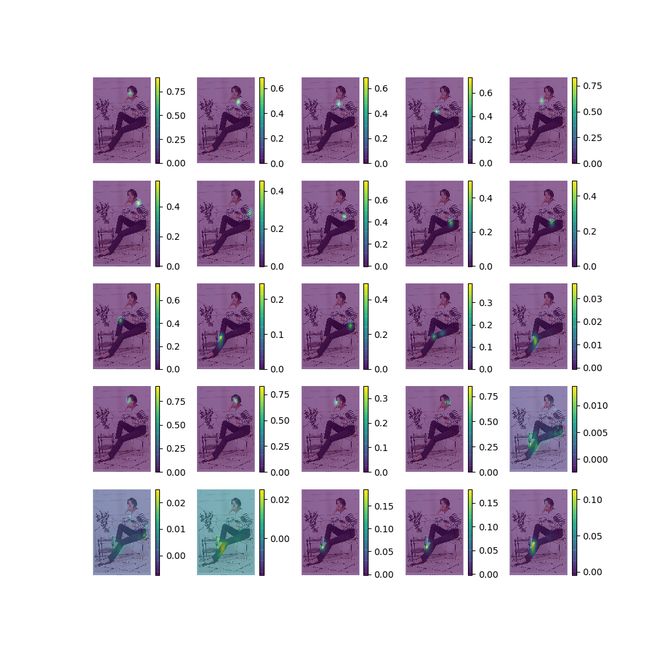
def vis_heatmaps(self, imgfile, net_outputs):
img_cv2 = cv2.imread(imgfile)
plt.figure(figsize=[10, 10])
for pdx in range(self.num_points):
probMap = net_outputs[0, pdx, :, :]
probMap = cv2.resize(
probMap,
(img_cv2.shape[1], img_cv2.shape[0])
)
plt.subplot(5, 5, pdx+1)
plt.imshow(cv2.cvtColor(img_cv2, cv2.COLOR_BGR2RGB))
plt.imshow(probMap, alpha=0.6)
plt.colorbar()
plt.axis("off")
plt.show()
def vis_pose(self, imgfile, points):
img_cv2 = cv2.imread(imgfile)
img_cv2_copy = np.copy(img_cv2)
for idx in range(len(points)):
if points[idx]:
cv2.circle(img_cv2_copy,
points[idx],
8,
(0, 255, 255),
thickness=-1,
lineType=cv2.FILLED)
cv2.putText(img_cv2_copy,
"{}".format(idx),
points[idx],
cv2.FONT_HERSHEY_SIMPLEX,
1,
(0, 0, 255),
2,
lineType=cv2.LINE_AA)
# Draw Skeleton
for pair in self.point_pairs:
partA = pair[0]
partB = pair[1]
if points[partA] and points[partB]:
cv2.line(img_cv2,
points[partA],
points[partB],
(0, 255, 255), 3)
cv2.circle(img_cv2,
points[partA],
8,
(0, 0, 255),
thickness=-1,
lineType=cv2.FILLED)
plt.figure(figsize=[10, 10])
plt.subplot(1, 2, 1)
plt.imshow(cv2.cvtColor(img_cv2, cv2.COLOR_BGR2RGB))
plt.axis("off")
plt.subplot(1, 2, 2)
plt.imshow(cv2.cvtColor(img_cv2_copy, cv2.COLOR_BGR2RGB))
plt.axis("off")
plt.show()
if __name__ == '__main__':
print("[INFO]Pose estimation.")
img_file = "test.jpg"
#
start = time.time()
modelpath = "/path/to/openpose_models/"
pose_model = general_pose_model(modelpath, mode="BODY25")
print("[INFO]Model loads time: ", time.time() - start)
start = time.time()
res_points = pose_model.predict(img_file)
print("[INFO]Model predicts time: ", time.time() - start)
pose_model.vis_pose(img_file, res_points)
输出如:

参考:
[1] - Github - spmallick/learnopencv/OpenPose/
[2] - Deep Learning based Human Pose Estimation using OpenCV ( C++ / Python ) - 2018.05.29