基于Vivado HLS在zedboard中的Sobel滤波算法实现
基于Vivado HLS在zedboard中的Sobel滤波算法实现
平台:zedboard + Webcam
工具:g++4.6 + VIVADO HLS + XILINX EDK + XILINX SDK
系统:ubuntu12.04
总体设计思路

sobel 算法理论基础
索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函数的灰度之近似值。在图像的任何一点使用此算子,将会产生对应的灰度矢量或是其法矢量。
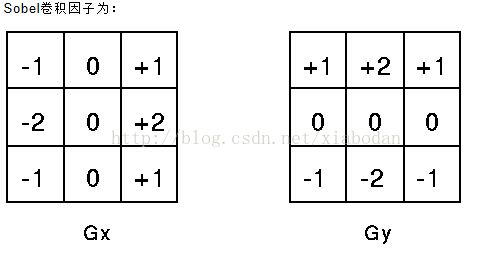
该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。如果以A代表原始图像,Gx及Gy分别代表经横向及纵向边缘检测的图像灰度值,其公式如下:

Gx = (-1)*f(x-1, y-1) + 0*f(x,y-1) + 1*f(x+1,y-1)
+(-2)*f(x-1,y) + 0*f(x,y)+2*f(x+1,y)
+(-1)*f(x-1,y+1) + 0*f(x,y+1) + 1*f(x+1,y+1)
= [f(x+1,y-1)+2*f(x+1,y)+f(x+1,y+1)]-[f(x-1,y-1)+2*f(x-1,y)+f(x-1,y+1)]
Gy =1* f(x-1, y-1) + 2*f(x,y-1)+ 1*f(x+1,y-1)
+0*f(x-1,y) 0*f(x,y) + 0*f(x+1,y)
+(-1)*f(x-1,y+1) + (-2)*f(x,y+1) + (-1)*f(x+1, y+1)
= [f(x-1,y-1) + 2f(x,y-1) + f(x+1,y-1)]-[f(x-1, y+1) + 2*f(x,y+1)+f(x+1,y+1)]
其中f(a,b),表示图像(a,b)点的灰度值;
图像的每一个像素的横向及纵向灰度值通过以下公式结合,来计算该点灰度的大小:
通常,为了提高效率 使用不开平方的近似值:
如果梯度G大于某一阀值则认为该点(x,y)为边缘点。
然后可用以下公式计算梯度方向:
Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。
流程
HLS算法验证与实现
算法验证包括算法C/C++实现,综合编译仿真,实现导出pcore用于------->XLINX EDK
EDK硬件 工程搭建
EDK中主要搭建zedboard硬件平台,实现VDMA(用AXI-Stream),HDMI,DDR等等,生成system.bit,用于连同uboot、fsbl生成zedboard bootload (BOOT.BIN)。
参考:
zedboard启动过程分析 :http://blog.csdn.net/xiabodan/article/details/23093111
zedboard 构建嵌入式linux : http://blog.csdn.net/xiabodan/article/details/23379645
LINUX 系统移植
准备一张>8G的SD卡,分区为FAT32+EXT4(其中EXT4为文件系统>4GB,FAT分区为内核 设备树 bootloader) 可以采用gparted分区工具完成,apt-get install gparted
系统移植包括内核镜像的编译,bootloader的移植,设备树的编译,文件系统的移植
具体移植步骤参见:http://blog.csdn.net/xiabodan/article/details/23379645
内核镜像地址:git clone http://github.com/Digilent/linux-3.3.digilent.git
uboot源码 :git clone git://git.xiinx.com/u-boot-xarm.git点击打开链接 点击打开链接 点击打开链接
设备树在内核中可以找到,将设备树,内核镜像,BOOT.BIN拷贝到SD卡中FAT分区中
文件系统:http://releases.linaro.org/images/12.04 直接拷贝到SD卡中EXT4分区中
LINUX VDMA驱动应用程序编写与实现
编写驱动程序是为了我们能在PS中对VDMA进行管理和控制。前提是在底层中我们已经做好了所有相关的硬件设计等等。
移植OPENCV库:用于对比FPGA算法处理速度比较,有两种方法移植OPENCV库,
1:apt-get install libopencv-dev python-opencv(用于python中)
2:下载源码编译
源码地址:http://sourceforge.net/projects/opencvlibrary/files/opencv-unix/
编译步骤参考:基于opencv网络摄像头在ubuntu下的视频获取http://blog.csdn.net/xiabodan/article/details/38875875
结果展示

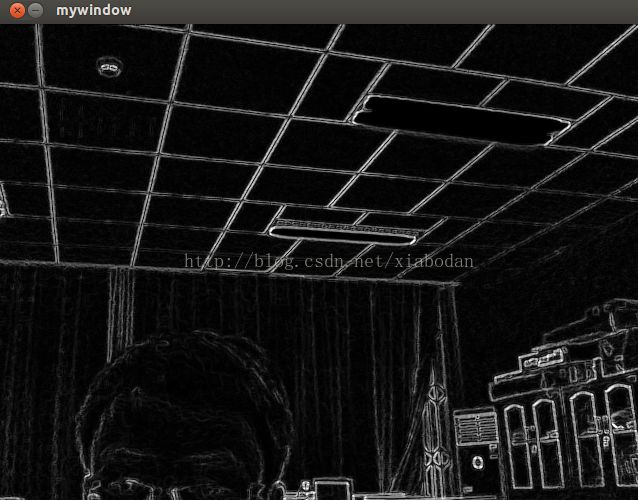
FPGA硬件实现Sobel效果 OPENCV软件实现Sobel

处理时间显示
结果分析
上图处理时间中 640*480的视频
1:opencv处理一帧的时间0.148554s 大约为7帧每秒
2:fpga硬件实现一帧总时间(算法时间+VDMA拷贝时间)
3:fpga硬件实现一帧的算法时间,不包含拷贝DMA时间
在cortex A9 700MHZ 速度中 ,FPGA实现的算法速度比OPENCV软件实现速度快50-100倍,FPGA一秒钟可以处理500帧图像,OPENCV只能处理10张不到
但是缺点是,视频拷贝花费了太多的时间。所以我个人认为FPGA处理图像不在算法实现有多复杂与困难,因为FPGA的并行率理论上是无穷的,但是视频流的输入输出的速度直接决定了处理速度。暂时没想到好的方法解决。
参考
使用HLS各种问题 : http://blog.csdn.net/xiabodan/article/details/38448589
Sobel边缘检测算法 : http://www.cnblogs.com/lancidie/archive/2011/07/17/2108885.html
博客:http://shakithweblog.blogspot.com/2012/12/getting-sobel-filter-application.html
作者:xiabodan 出处:http://blog.csdn.net/xiabodan/article/details/39254443