CVPR2018 SPG、KCNet、PointwiseCNN
目录
- CVPR2018 SPG
- Problem & Solution
- Geometric Partition with a Global Energy
- Superpoint Graph Construction
- Superpoint Embedding
- Contextual Segmentation
- CVPR2018 KCNet
- Architecture
- Learning on Local Geometric Structure
- Learning on Local Feature Structure
- CVPR2018 PointwiseCNN
- Pointwise Architecture
- Pointwise Convolution
嘤嘤嘤,SPG还没搞懂但是实验效果不错,KCNet,Pointwise都是从类似于卷积核提取特征的切入点入手的。
CVPR2018 SPG
Large-scale Point Cloud Semantic Segmentation with Superpoint Graphs
(论文链接)(pytorch源码链接)
不同于此前的工作,SPG不是去逐点进行分类,而是将多个点组成的点集看作一个完整的整体,对每个点集再进行分类,并且可以描述相邻物体之间的关系,非常适用于上下文分类。SPG的大小是由场景中简单结构的数量来确定的,而不是点的总数。
(啊。好复杂啊。里边好多东西都不太懂,之前没了解过,提到的一些论文也需要看一下。以后慢慢填吧这个坑。但是从最后实验的结果来看,效果确实不错。)
Problem & Solution
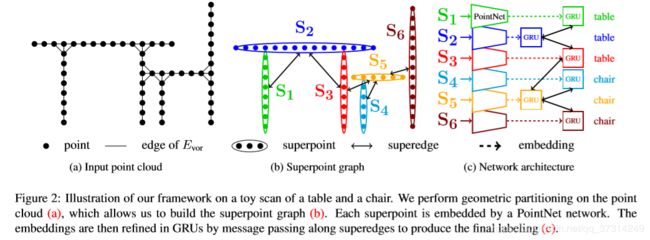
Geometrically homogeneous partition 将点云划分为简单的几何图形,suprerpoint
Superpoint embedding 降采样
Contextual segmentation 基于图卷积的深度学习算法
Geometric Partition with a Global Energy

进行划分的目标不是把整个物体划分出来,而是划分成多个简单的几何形体。
对于含有 n n n个点的三维点云 C \mathcal{C} C,每个点包括位置信息 p i p_i pi、观测信息 o i o_i oi(如颜色、强度等)
对于每个点,计算一组 d g d_g dg几何特征 f i ∈ R d g f_i\in \mathbb{R}^{d_g} fi∈Rdg来刻画其局部邻域的形状。使用的特征包括[1]提出的线性度、平面度和散射度,垂直度特征,此外还计算了每个点的绝对高度作为点 p i p_i pi的 z z z坐标。
[1]提出的全局能量是根据点云的10个最近邻邻接图 G n n = ( C , E n n ) G_{nn}=(C,E_{nn}) Gnn=(C,Enn)来定义的。几何形体划分可以被定义为下列连通分量的优化问题:
arg min g ∈ R d g ∑ i ∈ C ∣ ∣ g i − f i ∣ ∣ 2 + μ ∑ ( i , j ) ∈ E n n w i , j [ g i − g j ≠ 0 ] \arg \min _{g\in \mathbb{R}^{d_g}} \sum _{i\in \mathcal{C}} ||g_i-f_i||^2+\mu \sum _{(i,j)\in E_{nn}}w_{i,j}[g_i-g_j\ne0] argg∈Rdgmini∈C∑∣∣gi−fi∣∣2+μ(i,j)∈Enn∑wi,j[gi−gj=0]
其中 [ ⋅ ] [·] [⋅]为艾佛森括号,边的权值 w ∈ R + ∣ E ∣ w\in R^{| E |}_+ w∈R+∣E∣与边缘长度成线性递减关系, μ \mu μ是正则化强度。
使用[2]所提出的 l 0 − c u t l_0-cut l0−cut算法快速迭代求得近似解。从上式解得的连通分量 S = S 1 , ⋅ ⋅ ⋅ , S k S={S_1,···,S_k} S=S1,⋅⋅⋅,Sk称为superpoints。
Superpoint Graph Construction
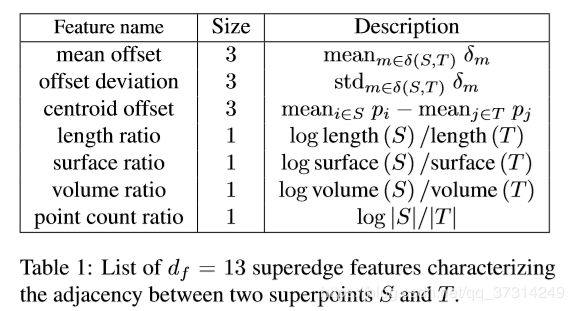
SPG是点云的结构化表示,是一个有向图 G = ( S , E , F ) \mathcal{G=(S,E},F) G=(S,E,F),节点 S \mathcal{S} S是superpoints集,边 E \mathcal{E} E是superpoint之间的边superedges,superedges有由特征 d f d_f df表示的邻接关系 F ∈ R E × d f F\in\mathbb{R}^{\mathcal{E}\times d_f} F∈RE×df。
定义一个[3]提出的对称Voronoi邻接图 G v o r = ( C , E v o r ) G_vor=(C,E_{vor}) Gvor=(C,Evor)。如果superpoints S S S和 T T T之间至少有一条边在 E v o r E_{vor} Evor中,那么 S S S和 T T T就是邻接的:
E = { ( S , T ) ∈ S 2 ∣ ∃ ( i , j ) ∈ E v o r ∩ ( S × T ) } \mathcal{E}=\{(S,T)\in \mathcal{S}^2 | \exists(i,j) \in E_{vor}\cap (S\times T)\} E={(S,T)∈S2∣∃(i,j)∈Evor∩(S×T)}
与superpoints ( S , T ) (S,T) (S,T)相关的重要空间特征是从 E v o r E_{vor} Evor中的边的偏移 δ ( S , T ) \delta(S,T) δ(S,T)获得的:
δ ( S , T ) = { ( p i , p j ) ∣ ( i , j ) ∈ E v o r ∩ ( S × T ) } \delta (S,T)=\{(p_i,p_j)|(i,j)\in E_{vor}\cap (S\times T)\} δ(S,T)={(pi,pj)∣(i,j)∈Evor∩(S×T)}
superedgs的特征也可以通过比较相邻superpoints的形状和大小来得到。其他的一些superedgs特征↓:
Superpoint Embedding
这一步的目的是将每一个superpoint S i S_i Siembedding得到一个 d z d_z dz维的向量 z i z_i zi。论文中选用了pointnet来实现。
Contextual Segmentation
受到GatedGNN和ECC的启发,首先用上一步中得到的 z i z_i zi来初始化GRU的隐藏单元,然后迭代更新 t = 1 , . . . T t=1,...T t=1,...T。对于每一次迭代,一个GRU的隐藏状态用 h i ( t ) h_i^{(t)} hi(t)表示,传来的输入信息为 m i ( t ) m_i^{(t)} mi(t),计算得到的新的状态为 h i ( t + 1 ) h_i^{(t+1)} hi(t+1)。输入 m i ( t ) m_i^{(t)} mi(t)是相邻superpoints j j j的隐藏状态 h j ( t ) h_j^{(t)} hj(t)的加权和,权重由 superedge ( j , i ) (j,i) (j,i)的特征 F j , i F_{j,i} Fj,i决定。上述计算是通过多层感知机实现,计算过程如下:
h i ( t + 1 ) = ( 1 − u i ( t ) ) ⊙ q i ( t ) + u i ( t ) ⊙ h i ( t ) q i ( t ) = tanh ( x 1 , i ( t ) + r i ( t ) ⊙ h 1 , i ( t ) ) u i ( t ) = σ ( x 2 , i ( t ) + h 2 , i ( t ) ) , r i ( t ) = σ ( x 3 , i ( t ) + h 3 , i ( t ) ) ( h 1 , i ( t ) , h 2 , i ( t ) , h 3 , i ( t ) ) T = ρ ( W h h i ( t ) + b h ) ( x 1 , i ( t ) , x 2 , i ( t ) , x 3 , i ( t ) ) T = ρ ( W x x i ( t ) + b x ) x 1 , i ( t ) = σ ( W g h i ( t ) + b g ) ⊙ m i ( t ) m i ( t ) = m e a n j ∣ ( j , i ) ∈ E ( F j i , . ; W e ) ⊙ h j ( t ) h i ( 1 ) = z i , y i = W o ( h i ( 1 ) , … , h i ( T + 1 ) ) T \begin{aligned} \mathbf{h}_{i}^{(t+1)} =\left(1-\mathbf{u}_{i}^{(t)}\right) \odot \mathbf{q}_{i}^{(t)}+\mathbf{u}_{i}^{(t)} \odot \mathbf{h}_{i}^{(t)} \\ \mathbf{q}_{i}^{(t)} =\tanh \left(\mathbf{x}_{1, i}^{(t)}+\mathbf{r}_{i}^{(t)} \odot \mathbf{h}_{1, i}^{(t)}\right) \\ \mathbf{u}_{i}^{(t)}=\sigma\left(\mathbf{x}_{2, i}^{(t)}+\mathbf{h}_{2, i}^{(t)}\right), \mathbf{r}_{i}^{(t)}=\sigma\left(\mathbf{x}_{3, i}^{(t)}+\mathbf{h}_{3, i}^{(t)}\right) \\ \left(\mathbf{h}_{1,i}^{(t)}, \mathbf{h}_{2, i}^{(t)}, \mathbf{h}_{3, i}^{(t)}\right)^{T} =\rho\left(W_{h} \mathbf{h}_{i}^{(t)}+b_{h}\right) \\ \left(\mathbf{x}_{1,i}^{(t)}, \mathbf{x}_{2, i}^{(t)}, \mathbf{x}_{3, i}^{(t)}\right)^{T} =\rho\left(W_{x} \mathbf{x}_{i}^{(t)}+b_{x}\right) \\ \mathbf{x}_{1, i}^{(t)}=\sigma\left(W_{g} \mathbf{h}_{i}^{(t)}+b_{g}\right) \odot m_i^{(t)}\\ m_i^{(t)}=mean_{j|(j,i)\in \mathcal{E}}\left(F_{j i,.} ; W_{e}\right) \odot \mathbf{h}_{j}^{(t)} \\ \mathbf{h}_{i}^{(1)}=\mathbf{z}_{i}, \mathbf{y}_{i}=W_{o}\left(\mathbf{h}_{i}^{(1)}, \ldots, \mathbf{h}_{i}^{(T+1)}\right)^{T} \end{aligned} hi(t+1)=(1−ui(t))⊙qi(t)+ui(t)⊙hi(t)qi(t)=tanh(x1,i(t)+ri(t)⊙h1,i(t))ui(t)=σ(x2,i(t)+h2,i(t)),ri(t)=σ(x3,i(t)+h3,i(t))(h1,i(t),h2,i(t),h3,i(t))T=ρ(Whhi(t)+bh)(x1,i(t),x2,i(t),x3,i(t))T=ρ(Wxxi(t)+bx)x1,i(t)=σ(Wghi(t)+bg)⊙mi(t)mi(t)=meanj∣(j,i)∈E(Fji,.;We)⊙hj(t)hi(1)=zi,yi=Wo(hi(1),…,hi(T+1))T
Input Gating
Edge-Conditioned Convolution
State Concatenation
Relation to CRFs

[1] S. Guinard and L. Landrieu. Weakly supervised segmentation-aided classification of urban scenes from 3d LiDAR point clouds. In ISPRS 2017, 2017. 2, 3, 8
[2] L. Landrieu and G. Obozinski. Cut pursuit: Fast algorithms to learn piecewise constant functions on general weighted graphs. SIAM Journal on Imaging Sciences, 10(4):1724– 1766, 2017. 3
[3] J. W. Jaromczyk and G. T. Toussaint. Relative neighborhood graphs and their relatives. Proceedings of the IEEE, 80(9):1502–1517, 1992. 4
CVPR2018 KCNet
Mining Point Cloud Local Structures by Kernel Correlation and Graph Pooling
(论文链接)(caffe源码链接)(pytorch源码链接)
PointNet++通过牺牲速度构建更加复杂的模型来更好的提取局部特征,KCNet尝试在保持网络简单结构的条件下,探寻其他有效的、可学习的、具有清晰几何解释的局部特征提取方法来改进PointNet。提出的改进主要有两个:一个是用于提取局部几何结构的kernel correlation layer,另一个是用于提高网络鲁棒性的graph-based pooling layer
最大的创新点大概在设计了kernel correlation,使得能够更好的提取点云的局部结构特征,暂时还没有看过三维卷积核直接应用到点云的网络,不知道能不能得到类似的局部特征,但是考虑到点云的数量特征,直接用三维卷积核大概是不行吧hhhh。。。。
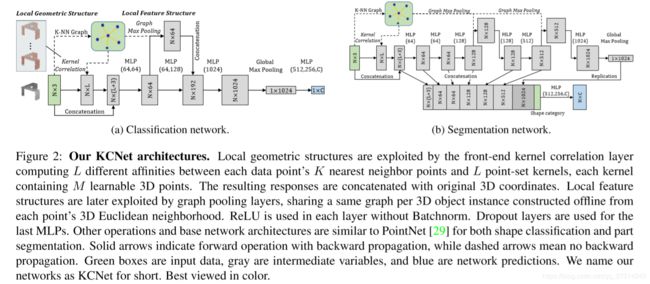
Architecture
Learning on Local Geometric Structure
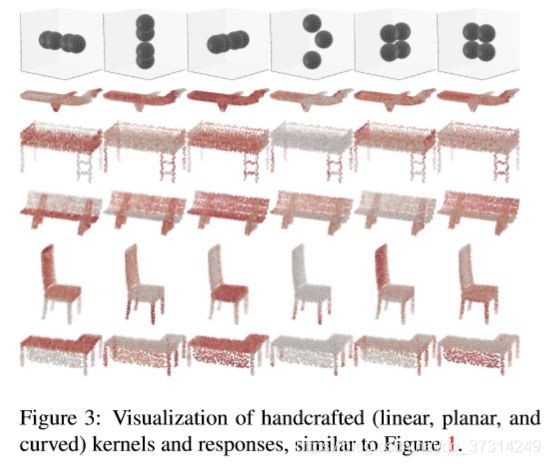
kernel points 类似于卷积核,通过反向传播来不断地调整找到一组点的参考/模板。
使用类似于Leave-one-out Kernel Correlation (LOO-KC)和 multiply-linked registration损失函数来提取局部几何结构特征。
一个可以学习 M M M个点的point-set kernel κ \boldsymbol{\kappa} κ和含有 N N N个点的点云的 anchor point x i \mathbf{x}_{i} xi 之间核相关关系 kernel correlation(KC)如下:
K C ( κ , x i ) = 1 ∣ N ( i ) ∣ ∑ m = 1 M ∑ n ∈ N ( i ) K σ ( κ m , x n − x i ) \mathrm{KC}\left(\boldsymbol{\kappa}, \mathbf{x}_{i}\right)=\frac{1}{|\mathcal{N}(i)|} \sum_{m=1}^{M} \sum_{n \in \mathcal{N}(i)} \mathrm{K}_{\sigma}\left(\boldsymbol{\kappa}_{m}, \mathbf{x}_{n}-\mathbf{x}_{i}\right) KC(κ,xi)=∣N(i)∣1m=1∑Mn∈N(i)∑Kσ(κm,xn−xi)
其中 κ m \boldsymbol{\kappa}_m κm是核中的第 m m m个可学习点, N ( i ) \mathcal{N}(i) N(i)是anchor point x i \mathbf{x}_{i} xi 的邻点的集合, x n \mathbf{x}_{n} xn是 x i \mathbf{x}_{i} xi的邻点之一。 K σ ( ⋅ , ⋅ ) \mathrm{K}_{\sigma}(·,·) Kσ(⋅,⋅): ℜ D × ℜ D → ℜ \Re^{D} \times \Re^{D} \rightarrow \Re ℜD×ℜD→ℜ是任何有效的核函数( D D D是核函数维度)。为了有效地存储点的局部邻域,我们将每个点看作一个顶点来预先计算KNNG,边只连接附近的顶点。论文中选用的是高斯核函数:
K σ ( k , δ ) = exp ( − ∥ k − δ ∥ 2 2 σ 2 ) \mathrm{K}_{\sigma}(\mathbf{k}, \boldsymbol{\delta})=\exp \left(-\frac{\|\mathbf{k}-\boldsymbol{\delta}\|^{2}}{2 \sigma^{2}}\right) Kσ(k,δ)=exp(−2σ2∥k−δ∥2)
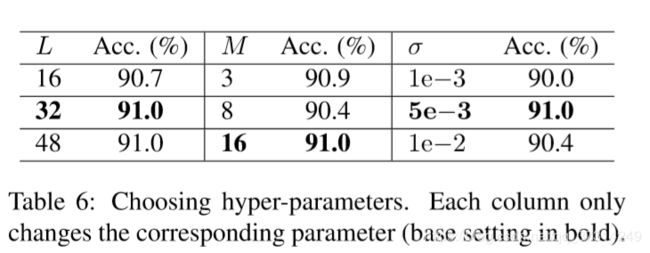
其中, ∣ ∣ ⋅ ∣ ∣ ||·|| ∣∣⋅∣∣是欧氏距离, σ \sigma σ是核的宽度。 σ \sigma σ的大小对最后的结果的影响如下表:
在进行反向传播时:
∂ L ∂ κ m = ∑ i = 1 N α i d i [ ∑ n ∈ N ( i ) v m , i , n exp ( − ∥ v m , i , n ∥ 2 2 σ 2 ) ] \frac{\partial \mathcal{L}}{\partial \kappa_{m}}=\sum_{i=1}^{N} \alpha_{i} d_{i}\left[\sum_{n \in \mathcal{N}(i)} \mathbf{v}_{m, i, n} \exp \left(-\frac{\left\|\mathbf{v}_{m, i, n}\right\|^{2}}{2 \sigma^{2}}\right)\right] ∂κm∂L=i=1∑Nαidi⎣⎡n∈N(i)∑vm,i,nexp(−2σ2∥vm,i,n∥2)⎦⎤
其中, L \mathcal{L} L是损失函数,每个点 x i \mathbf{x}_{i} xi的KC反馈 d i = ∂ L ∂ K C ( κ , x i ) d_i=\frac{\partial \mathcal{L}}{\partial KC(\kappa,\mathbf{x}_i)} di=∂KC(κ,xi)∂L,正则常数 α i = − 1 ∣ N ( i ) ∣ σ 2 \alpha_i=\frac{-1}{|\mathcal{N}(i)|\sigma^2} αi=∣N(i)∣σ2−1,局部差分向量 v m , i , n = κ m + x i − x n \mathbf{v}_{m, i, n}=\kappa_{m}+\mathbf{x}_{i}-\mathbf{x}_{n} vm,i,n=κm+xi−xn
KC与LOO-KC的不同在于:KC计算的是相邻点和核内可学习到的点的相似性,且KC允许核中的点自由移动。
通过学习得到的

Learning on Local Feature Structure
把每个点看作顶点,只与相邻的点用边连接构造了一个KNNG。 作者认为,相邻的点趋向于拥有相似的几何结构。通过neighborhood graph的学习可以更好的提取局部特征。
graph pooling layer的输入为 X ∈ ℜ N × K \mathbf{X} \in \Re^{N \times K} X∈ℜN×K,KNNG的邻接矩阵 W ∈ R e N × N W\in\ Re^{N \times N} W∈ ReN×N,如果 i i i, j j j之间有边,则 W ( i , j ) = 1 W(i,j)=1 W(i,j)=1,否则为0。通过graph pooling操作聚合其邻域内每个点的特征:
P = D − 1 W \mathbf{P}=\mathbf{D}^{-1} \mathbf{W} P=D−1W
其中, D ∈ ℜ N × N D\in \Re^{N \times N} D∈ℜN×N是degree matrix: d i , j = { deg ( i ) , if i = j 0 , otherwise d_{i, j}=\left\{\begin{array}{ll} {\operatorname{deg}(i),} & {\text { if } i=j} \\ {0,} & {\text { otherwise }} \end{array}\right. di,j={deg(i),0, if i=j otherwise
得到上述局部特征后使用graph max pooling或者average pooling,然后使用与pointnet类似的网络结构来实现分类和语义分割,具体的网络结构如Figure2.
experiment on ShapeNet part segmentation

CVPR2018 PointwiseCNN
Pointwise Convolutional Neural Networks
(论文链接)(tensorflow源码链接)
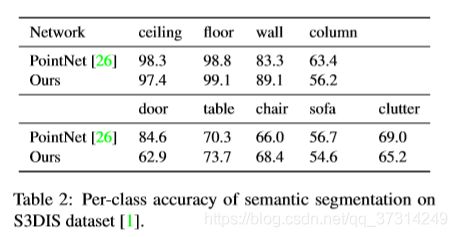
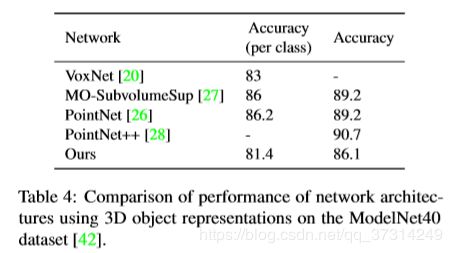
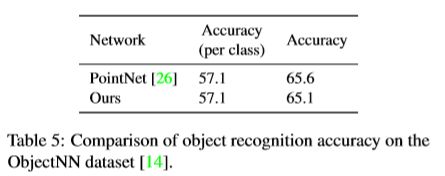
与KCNet一样,PointwiseCNN也将关注点放在了卷积算子上,提出了一种新的卷积算子,PointwiseCNN的整个网络非常的简单,点云数据集也不需要特别复杂的预处理,最后也可以在S3DIS、SceneNN、ObjectNN等数据集上得到与PointNet相差不大的准确度。
Pointwise Architecture
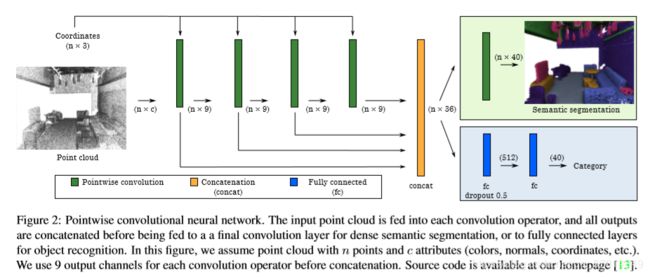
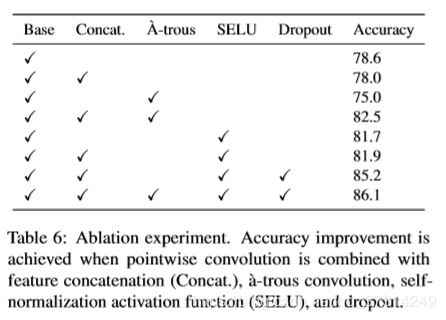
网络的结构非常的简单,使用了四层大小一致的带有Pointwise卷积操作的Pointwise Convolution Layer,将各层的输出concat到一起,然后使用一层Pointwise Convolution Layer进行语义分割,或者使用两层全连接层进行分类。
Pointwise Convolution
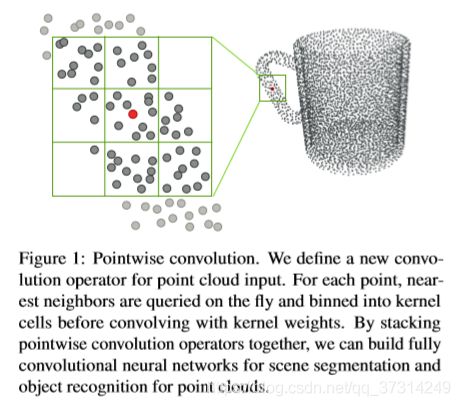
Convolution Pointwise Convolution卷积核的设计非常的简单,以输入点云中的某一点为中心,卷积核中的点都会对中心点有一定的贡献(卷积核的形状可以是任意的,但有大小和半径属性),如下图:
pointwise convolution 可以用下式表示:
x i ℓ = ∑ k w k 1 ∣ Ω i ( k ) ∣ ∑ p j ∈ Ω i ( k ) x j ℓ − 1 x_{i}^{\ell}=\sum_{k} w_{k} \frac{1}{\left|\Omega_{i}(k)\right|} \sum_{p_{j} \in \Omega_{i}(k)} x_{j}^{\ell-1} xiℓ=k∑wk∣Ωi(k)∣1pj∈Ωi(k)∑xjℓ−1
其中, k k k迭代所有pointwise核的子区域, Ω i ( k ) \Omega_{i}(k) Ωi(k)是以 i i i为中心的核的第 k k k个子区域, p i p_i pi是点 i i i的坐标, ∣ ⋅ ∣ |·| ∣⋅∣是对子区域中所有的点进行计数, w k w_k wk是核中第 k k k个子区域的权重, x i x_i xi和 x j x_j xj是点 i i i和 j j j的值, l − 1 l-1 l−1和 l l l是输入和输出层的标号。
Gradient back propagation 要进行训练就需要计算梯度来核的优化,定义损失函数为 L L L,对输入的梯度可以定义为:
∂ L ∂ x j ℓ − 1 = ∑ i ∈ Ω j ∂ L ∂ x i ℓ ∂ x i ℓ ∂ x j ℓ − 1 \frac{\partial L}{\partial x_{j}^{\ell-1}}=\sum_{i \in \Omega_{j}} \frac{\partial L}{\partial x_{i}^{\ell}} \frac{\partial x_{i}^{\ell}}{\partial x_{j}^{\ell-1}} ∂xjℓ−1∂L=i∈Ωj∑∂xiℓ∂L∂xjℓ−1∂xiℓ
其中, ∂ L ∂ x j ℓ \frac{\partial L}{\partial x_{j}^{\ell}} ∂xjℓ∂L是在 l l l层的梯度,在反向传播的过程中可以计算得到, ∂ x i ℓ ∂ x j ℓ − 1 \frac{\partial x_{i}^{\ell}}{\partial x_{j}^{\ell-1}} ∂xjℓ−1∂xiℓ如下:
∂ x i ℓ ∂ x j ℓ − 1 = ∑ k w k 1 ∣ Ω i ( k ) ∣ ∑ p j ∈ Ω i ( k ) 1 \frac{\partial x_{i}^{\ell}}{\partial x_{j}^{\ell-1}}=\sum_{k} w_{k} \frac{1}{\left|\Omega_{i}(k)\right|} \sum_{p_{j} \in \Omega_{i}(k)} 1 ∂xjℓ−1∂xiℓ=k∑wk∣Ωi(k)∣1pj∈Ωi(k)∑1
类似的可以定义对核中权重的梯度:
∂ L ∂ w k = ∑ i ∂ L ∂ x i ℓ ∂ x i ℓ ∂ w k \frac{\partial L}{\partial w_{k}}=\sum_{i} \frac{\partial L}{\partial x_{i}^{\ell}} \frac{\partial x_{i}^{\ell}}{\partial w_{k}} ∂wk∂L=i∑∂xiℓ∂L∂wk∂xiℓ
其中, ∂ x i ℓ ∂ w k = 1 ∣ Ω i ( k ) ∣ ∑ p j ∈ Ω i ( k ) x j ℓ − 1 \frac{\partial x_{i}^{\ell}}{\partial w_{k}}=\frac{1}{\left|\Omega_{i}(k)\right|} \sum_{p_{j} \in \Omega_{i}(k)} x_{j}^{\ell-1} ∂wk∂xiℓ=∣Ωi(k)∣1∑pj∈Ωi(k)xjℓ−1
论文中使用的核为 3 × 3 × 3 3\times 3\times 3 3×3×3的卷积核,卷积核中所有单元的权重都是一样的。
文的网络中没有使用池化层。
Point order 作者认为输入点云是需要进行排序的,因此在输入之前,按照特定的顺序(如XYZ、Mortoncurve)对点云进行了排序。但作者认为在进行语义分割时点序是没有影响的。
A-trous convolution 很容易实现atrous convolution
Point attributes 可以添加一些颜色什么的数据进去
Relevance to geometric deep learning
一些实验结果: