- 树莓派笔记06—树莓派GPIO介绍和wiringPi库安装
TonyCode
树莓派开发板上提供了大量的GPIO引脚,它们通过40Pin的排针引出,早期版本只有26Pin。除去通用输入输出引脚、5V/3.3V电源和地引脚外,还提供了SPI、UART和IIC接口,新版本的开发板在原有基础上不断进行功能的扩展。1.GPIO编号方式树莓派的GPIO端口编号存在三种不同的方式:物理「BOARD」编号方式:从左到右,从上到下,左边奇数,右边偶数,1-40。这种编号方式的优点是无论开发
- 2019-04-30【树莓派笔记】安装中文输入法
李必清
树莓派已经可以使用了,但我们平时上网需要输入中文,那么就需要安装中文输入法。由于我平时使用五笔,百度了一下,安装fcitx就可以。fcitx是FreeChineseInputToyforX的简写,中文名为小企鹅输入法。安装方法:在命令行中输入sudoaptinstallfcitx-table-wubi,根据提示完成安装后,任务栏键盘图标中就会多出一个五笔输入法。输入法设置.png使用sudoapt
- 2019-05-05【树莓派笔记】好用的SSH工具 FinalShell
李必清
以前用过的SSH工具都是一个黑屏幕,今天在网上看到一个叫FinalShell的SSH工具,还可以可视化的监视内存、CPU的使用率。FinalShell界面.png最下面的窗口,可以直接显示出树莓派上的目录和文件,可以在这里直接进行上传和下载。看起来功能很多,以后使用的时候再慢慢摸索。软件下载地址:http://www.hostbuf.com/t/988.html支持Windows、MacOs、Li
- 树莓派笔记07—wiringPi点亮LED
TonyCode
安装完wiringPi库后,我们就可以使用它来操作GPIO了,而点亮发光二极管的实验就如同「HelloWorld」一样神圣,本篇就在树莓派上驱动LED灯闪烁。1.硬件连接LED发光二极管的负极连接到树莓派的GND,LED的正极连接一个220欧的限流电阻连接到树莓派的11脚。电路连接图如下图所示:电路连接图远程登陆到树莓派,在终端中输入「gpioreadall」,可获取到引脚对应关系,我们可以看到,
- 树莓派笔记8:UDP传输视频帧
皇家园林巡游者
树莓派笔记OpenCV树莓派OpenCV
因为我在自己笔记本电脑上没能成功安装OpenCV-Contrib模块,因此不能使用人脸识别等高级功能,不过已经在树莓派上安装成功了,所以我想实现把树莓派上采集的视频帧传输到PC的功能,这样可以省去给树莓派配显示屏的麻烦,而且以后可能可以用在远程监控上。1UDP还是TCP首先考虑用哪种传输方式,平常TCP用的非常多,但是像视频帧这种数据用TCP不是太合适,因为视频数据的传输最先要考虑的是速度而不是准
- 树莓派笔记(三) 使用 RPi.GPIO 模块
GuanFuXinCSDN
树莓派树莓派linuxpythongpio输入输出
目录树莓派笔记(三)使用RPi.GPIO模块RPi.GPIO引脚简介引脚编号引脚图引脚设置指定引脚编号系统配置通道释放引脚输出pwm输入上拉/下拉电阻轮询输入中断和边检检测线程回调开关防抖树莓派笔记(三)使用RPi.GPIO模块RPi.GPIORPI.GPIO是python的一个模块,树莓派官方系统默认已经安装使用python控制GPIO需要导入RPI.GPIO模块导入模块#导入模块并检查它是否成
- 树莓派笔记6:自制小车(手柄控制)
皇家园林巡游者
树莓派笔记树莓派
继续树莓派小车的内容,这次记录手柄控制小车运动的实现。1方案设计对于手动控制小车的工具,大概有这么几种:①用红外遥控器,小车上放一个接收器,读取遥控器信息。实现应该比较简单,红外收发元件也很便宜,不过遥控器得对着小车,恐怕不太方便;②蓝牙手柄,因为树莓派带蓝牙,可以通过蓝牙接收手柄数据,不过一个蓝牙手柄可不便宜;③有线手柄,相比无线设备肯定low一点,不过我手头就只有一个有线手柄,50多块钱的小鸡
- 树莓派笔记(2)使用SSH登录树莓派
Yonas-Luo
树莓派
本文开发环境:硬件平台:树莓派3B操作系统:RespbianFull本文内容:使用SSH登陆树莓派SSH远程登陆SSH专为远程登录会话和其他网络服务提供安全性的协议,使用SSH登陆树莓派的优点是我们可以在计算机中自己操作操作树莓派。MobaXterm下载与安装下载MobaXterm是一个多功能的终端软件,百度云下载地址:链接:MobaXterm10.9提取码:xdo2安装直接打开压缩包中MobaX
- 2019-04-18【树莓派笔记】文件的权限777是咋回事
李必清
chmod777什么意思网上查资料,经常看到修改某个配置文件时要先修改文件的权限,就是这条代码:sudochmod777ssmtp.conf,由于之前没有学过Linux,不太明白。用ls-l查看:ls-l结果结果中一共有9列,分别对应:权限\文件硬链接数(文件夹的子文件夹数)\所有者\所有者所属组\文件大小\创建月份\创建日期\修改时间\文件(夹)名权限一共占10个字符,第1个如果是d表示是目录,
- 树莓派笔记
weixin_30586085
LCD和hdmi切换/home/LCD-show-master目录下LCD-hdmiLCD35-show时区修改sudocp/usr/share/zoneinfo/Asia/Shanghai/etc/localtimedate-Rwifi配置cat/etc/wpa_supplicant/wpa_supplicant.confnetwork={ssid="TP-02"psk="12345"key_m
- 树莓派笔记004——步进电机驱动板
勇敢的少年啊成为神话吧
树莓派电气Pythongpio
树莓派笔记004—步进电机驱动板电机型号坑爹的接线方式驱动原理区分五线四相步进电机的五根线ULN2003芯片简介驱动方式代码电机型号坑爹的接线方式不仔细看这幅图,再上网搜搜,很容易就接错。我在这个地方被网上错误的图片坑了很久时间可行的接法是先拔掉右边的那个套子,最左边引脚接外接电源负极,最右边引脚接外接电源正极仔细观察,电路板上其实标注好了,左边两个引脚是-,右边两个引脚是+。驱动原理区分五线四相
- 树莓派笔记17: 语音机器人
皇家园林巡游者
树莓派笔记
利用免费的百度语音及合成服务,图灵机器人聊天服务,在加上一点简单的硬件模块,我们就可以用树莓派搭建自己的语音机器人1组成模块树莓派支持3.5mm输入的小音箱不到20块钱的小麦克风可以同时接入麦克风和音箱的USB声卡(不是必须)MAX7219LED点阵屏程序流程图2音频输入和输出树莓派3B带有3.5MM音频输出口,所以可以直接接到自己的音箱上,但是没有音频输入接口,所以所以可以买一个可同时支持输入和
- 树莓派笔记14:舵机云台(二) 远程控制云台
皇家园林巡游者
树莓派笔记
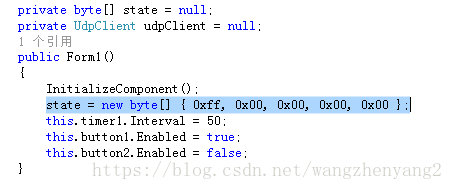
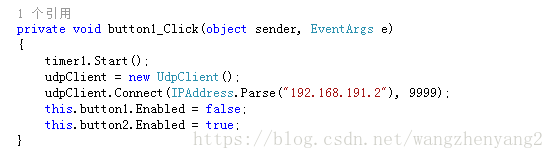
前面一篇已经准备好云台控制模块了,接着想实现的效果就是可以远程控制云台动作,比如在笔记本电脑上通过按方向键控制云台进行水平和垂直方向上的转动。1分析首先考虑用哪种方式与树莓派通信,这里我选择用UDP的方式向树莓派发送控制指令,主要原因是传输过程简单,不需要在通信逻辑上费精力。采用UDP协议的socket,电脑端不停地发控制指令,树莓派则循环接收指令,不需要去建立连接,反正只是近距离测试,基本不会在
- 树莓派控制舵机云台SG90
Spider_man_
树莓派
参考博客:https://blog.csdn.net/wangzhenyang2/article/details/80426361树莓派笔记13:舵机云台(一)https://blog.csdn.net/oalevel/article/details/79211215树莓派GPIO针脚在的BCM与BOARD模式https://blog.csdn.net/crazyquhezheng/article
- 树莓派笔记11:外接开关关机
皇家园林巡游者
树莓派笔记
1目标效果想要实现用外接在树莓派上的开关来对其进行关机操作的效果,对于一个简单的两档开关,按下“关”将使树莓派在几分钟后关机,如果再按下“开”的话则可以取消关机。2接线和编程实现的原理其实很简单,在自己的程序中判断开关的状态,如果是按下了开关,就调用shutdown的系统命令来关机。准备一个两档的开关,一头接在树莓派的GND脚,一头接在任意的GPIO口(我接在了BCM.4),将BCM.4脚设置为输
- 树莓派笔记1:系统安装、配置
皇家园林巡游者
树莓派笔记
我一直想要学一下linux,之前在自己电脑上用虚拟机装了一个ubuntu系统,不过感觉又麻烦又枯燥。在去年我买了一块树莓派的板子,因为树莓派的系统也是linux内核的,而且用树莓派可以搭建很多有趣的小系统,我感觉是个不错的学习工具,之前一直没时间鼓捣,现在空闲时间多了,每天晚上花点时间摆弄摆弄,既是尝个新鲜,也是趁机入门linux,把学习过程中的收获和经验记录下来,以供参考和交流。对于新买的板子,
- 树莓派笔记08-微信公众号控制树莓派(二)
一技破万法
上一篇笔记实现了树莓派上调用itchatmp接口对接微信公众测试号,并且能够实现对话功能,这一篇就实现微信公众号控制树莓派开关主机的功能。主要思路就是通过微信公众测试号的菜单功能选择来控制树莓派的引脚,树莓派引脚接继电器控制电脑主机。前期准备:继电器、杜邦线(公对母/母对母)1.微信公众测试号自定义菜单首先在微信公众测试号的界面找到最下方自定义菜单这一选项自定义菜单点进去然后划到最下方,有一个网页
- 树莓派笔记001——树莓派镜像安装
雪兰灵莹
树莓派笔记树莓派笔记
树莓派笔记001——树莓派镜像安装一、准备工作1、树莓派一套(我用的是树莓派3B)2、microsd卡一个(插手机上的内存卡,听说最好8g以上,我用的是32g)3、读卡器一个(因为电脑没有microsd卡的插槽啊)4、微雪7寸显示屏一套(这个可以没有,不过有了显示屏,安装好了镜像可以直接看到界面,嘿嘿嘿)二、下载镜像文件及工具(链接我都给出来啦)镜像文件可以在树莓派官网下载也可以通过百度云下载(镜
- 树莓派笔记18: Raspberry Pi+Node-Red+OneNET构建简单的物联网系统
皇家园林巡游者
树莓派笔记
最近在物联网领域Node-Red比较火热,Node-Red是一个基于Node.js的图形化程序开发平台,我们可以利用Node-Red快速开发IoT应用。本篇博文利用Node-Red和移动的OneNET平台建立一个简单的物联网系统,部署在树莓派上的Node-Red会读取温湿度数据并上传IoT云进行显示1用到哪些东西树莓派3BDH11温湿度传感器模块OneNET账号2OneNET应用配置OneNET中
- 树莓派笔记15:手机控制树莓派小车
皇家园林巡游者
树莓派笔记
1成果展示花了点时间做了简单的手机控制树莓派小车项目,其实主要是对之前各种学习内容的一个综合利用,也特地抽出时间学习了一下最基本的Android开发。下面的图片是成果的展示,树莓派小车由树莓派、小车地盘、电机及电机控制模块、摄像头、舵机云台和OLED显示屏等组成,手机端写了一个简单的App,可以控制小车的行进,控制摄像头云台转动,同时可以接收显示摄像头的图像。小车图片:手机App,左边的方向按钮控
- 树莓派笔记12:通过SPI操作OLED显示屏
皇家园林巡游者
树莓派笔记
树莓派自带SPI和I2C接口,因此可以方便地控制带SPI的控制芯片的OLED显示屏。要想成功实现树莓派与oled的通信,最好是买一个以SSD1306为主控芯片的oled,因为关于这个芯片的驱动库是最容易搜到的,当然如果有能力自己写驱动程序的话就无所谓了。这是我买的128X64,SPI接口的OLED模块,不到20块。网上对树莓派SPI操作OLED的大多数文章我猜应该是参考了这个链接里的教程https
- 树莓派笔记10:测试几种开机自启动的方法
皇家园林巡游者
树莓派笔记
1程序自启动之前在树莓派上写的程序,都是通过ssh连接后在控制台上用命令行启动的,这种方式适合测试和调试,完善好程序后,比较好的方法是把程序设置为开机自启动,这样树莓派一上电就开始运行程序。查阅网上的资料,主要有三种方法,一是在rc.local添加启动项;二是在~/.config/autostart中添加桌面启动应用;三是在/etc/init.d/中添加服务项。2编辑测试程序首先编辑一个pytho
- 树莓派笔记4:树莓派游戏机
皇家园林巡游者
树莓派笔记
这次记录比较轻松的内容,将树莓派做成“游戏主机”,当然这个主机只是具备模拟器功能而已,可以模拟街机、FC等平台上的游戏。最早要在树莓派上玩模拟器游戏需要手动安装和配置不同的模拟器,而现在国外很多爱好者专门制作了定制化的系统,直接把系统烧到树莓派就行了,不得不说老外在街机游戏上有着很深的感情,这些游戏系统的官网上有很多爱好者利用树莓派和其他材料自制的街机或掌上游戏机。1烧写镜像游戏系统可以看成是多个
- 树莓派笔记——连接电脑
沉迷单车的追风少年
树莓派
树莓派连接电脑的时候经常出问题,win7和xp系统没有什么问题,但是换成win10后就经常出bug,原因不明。这是当时的笔记:环境:电脑连接wifi网线接树莓派配置:1.设置同一网段在cmd命令行中输入arp-a查询wif和网线连接的接口如图wlan接口为192.168.43.233网线连接为192.168.43.100在刚开始的配置中,他们很可能不在同一网段—第二个端口是168.xx.xx.xx
- 《树莓派笔记》树莓派系统的安装与远程登录
perfect_young
树莓派笔记
一、系统安装1、树莓派3B、16G的SD卡一张,读卡器2、下载镜像文件https://www.raspberrypi.org/downloads/,解压得到.img格式的文件3、下载Win32DiskImager,把镜像写入SD卡。下载地址http://sourceforge.net/projects/win32diskimager/上传好映像文件,点击“写入”就可以了。4.在SD卡的boot目录
- 树莓派笔记:搭建家用小型NAS文件共享服务器
dengyun1118
硬件:RaspberryPi4移动硬盘,USB3.0接口操作系统:Rasbian树莓派操作系统的安装:这里只提一下官方的用NOOBS安装Rasbian系统的安装方法。下载NOOBS;将压缩包解压到SD卡;连接好树莓派的各个硬件,包括鼠标键盘显示器,插入刚刚写入NOOBS文件的SD卡;接通电源,按提示选择即可更新Vim(这个步骤无太大必要,可以忽略):树莓派自带的Vim不是很好用,我们可以更新一下:
- 树莓派笔记04—树莓派更换更新源
TonyIOT
树莓派
树莓派系统安装后默认使用国外的镜像源来更新软件,由于不可描述原因,国内访问速度非常慢,因此需要换成国内源。树莓派官方提供了一个更新源列表,在这里我们使用中科大的软件源和系统源。1.登陆到树莓派。你可以通过屏幕键鼠直接打开终端或者通过SSH登陆到树莓派。2.备份源文件。执行如下命令:sudocp/etc/apt/sources.list/etc/apt/sources.list.baksudocp/
- 树莓派笔记16: 体验Windows10 IoT
皇家园林巡游者
树莓派笔记
Windows10IoT是微软生态下的物联网操作系统,从最早发布时就是支持树莓派的。因为是微软的东西,其部署和使用完全是另一种风格,不过感觉还是挺有意思的。Windows10IoT相对较新,微软官网的文档和下载变动地有点多,所以很可能我记下的步骤过段时间就不适用了,还是要看官网里详细介绍(https://docs.microsoft.com/en-us/windows/iot-core/windo
- 树莓派笔记5:自制小车(简单避障)
皇家园林巡游者
树莓派笔记
利用树莓派做智能小车是个很常见的玩法,整个过程涉及手工制作、GPIO控制、Python程序编写、网络通信等内容,知乎上有的大神还加入图像识别甚至人工智能元素,我自己在制作过程中真的感觉非常有意思,也很有成就感。为了做这个小车,我不惜破费买了各种小车零件和电子元器件(其实花不了多少钱),还突击学习了Python,参考书上的内容和网络上的信息也搞出了自己的小车,虽然功能真的很简单,这次记录的是简单的避
- 树莓派笔记13:舵机云台(一)
皇家园林巡游者
树莓派笔记树莓派
最近买了个小型舵机云台模块来玩,淘宝上卖这个的挺多的,一般三四十块钱,很多还卖配套的摄像头。说是云台,其实就是用两个舵机结合固定板做的支撑模块,两个舵机分别控制左右和上下的转动。1关于舵机首先了解一下舵机的基本原理和工作过程(参考https://wenku.baidu.com/view/09ea6dd46bd97f192379e9b6.html?from=search)。淘宝上卖的小舵机基本都是S
- 书其实只有三类
西蜀石兰
类
一个人一辈子其实只读三种书,知识类、技能类、修心类。
知识类的书可以让我们活得更明白。类似十万个为什么这种书籍,我一直不太乐意去读,因为单纯的知识是没法做事的,就像知道地球转速是多少一样(我肯定不知道),这种所谓的知识,除非用到,普通人掌握了完全是一种负担,维基百科能找到的东西,为什么去记忆?
知识类的书,每个方面都涉及些,让自己显得不那么没文化,仅此而已。社会认为的学识渊博,肯定不是站在
- 《TCP/IP 详解,卷1:协议》学习笔记、吐槽及其他
bylijinnan
tcp
《TCP/IP 详解,卷1:协议》是经典,但不适合初学者。它更像是一本字典,适合学过网络的人温习和查阅一些记不清的概念。
这本书,我看的版本是机械工业出版社、范建华等译的。这本书在我看来,翻译得一般,甚至有明显的错误。如果英文熟练,看原版更好:
http://pcvr.nl/tcpip/
下面是我的一些笔记,包括我看书时有疑问的地方,也有对该书的吐槽,有不对的地方请指正:
1.
- Linux—— 静态IP跟动态IP设置
eksliang
linuxIP
一.在终端输入
vi /etc/sysconfig/network-scripts/ifcfg-eth0
静态ip模板如下:
DEVICE="eth0" #网卡名称
BOOTPROTO="static" #静态IP(必须)
HWADDR="00:0C:29:B5:65:CA" #网卡mac地址
IPV6INIT=&q
- Informatica update strategy transformation
18289753290
更新策略组件: 标记你的数据进入target里面做什么操作,一般会和lookup配合使用,有时候用0,1,1代表 forward rejected rows被选中,rejected row是输出在错误文件里,不想看到reject输出,将错误输出到文件,因为有时候数据库原因导致某些column不能update,reject就会output到错误文件里面供查看,在workflow的
- 使用Scrapy时出现虽然队列里有很多Request但是却不下载,造成假死状态
酷的飞上天空
request
现象就是:
程序运行一段时间,可能是几十分钟或者几个小时,然后后台日志里面就不出现下载页面的信息,一直显示上一分钟抓取了0个网页的信息。
刚开始已经猜到是某些下载线程没有正常执行回调方法引起程序一直以为线程还未下载完成,但是水平有限研究源码未果。
经过不停的google终于发现一个有价值的信息,是给twisted提出的一个bugfix
连接地址如下http://twistedmatrix.
- 利用预测分析技术来进行辅助医疗
蓝儿唯美
医疗
2014年,克利夫兰诊所(Cleveland Clinic)想要更有效地控制其手术中心做膝关节置换手术的费用。整个系统每年大约进行2600例此类手术,所以,即使降低很少一部分成本,都可以为诊 所和病人节约大量的资金。为了找到适合的解决方案,供应商将视野投向了预测分析技术和工具,但其分析团队还必须花时间向医生解释基于数据的治疗方案意味着 什么。
克利夫兰诊所负责企业信息管理和分析的医疗
- java 线程(一):基础篇
DavidIsOK
java多线程线程
&nbs
- Tomcat服务器框架之Servlet开发分析
aijuans
servlet
最近使用Tomcat做web服务器,使用Servlet技术做开发时,对Tomcat的框架的简易分析:
疑问: 为什么我们在继承HttpServlet类之后,覆盖doGet(HttpServletRequest req, HttpServetResponse rep)方法后,该方法会自动被Tomcat服务器调用,doGet方法的参数有谁传递过来?怎样传递?
分析之我见: doGet方法的
- 揭秘玖富的粉丝营销之谜 与小米粉丝社区类似
aoyouzi
揭秘玖富的粉丝营销之谜
玖富旗下悟空理财凭借着一个微信公众号上线当天成交量即破百万,第七天成交量单日破了1000万;第23天时,累计成交量超1个亿……至今成立不到10个月,粉丝已经超过500万,月交易额突破10亿,而玖富平台目前的总用户数也已经超过了1800万,位居P2P平台第一位。很多互联网金融创业者慕名前来学习效仿,但是却鲜有成功者,玖富的粉丝营销对外至今仍然是个谜。
近日,一直坚持微信粉丝营销
- Java web的会话跟踪技术
百合不是茶
url会话Cookie会话Seession会话Java Web隐藏域会话
会话跟踪主要是用在用户页面点击不同的页面时,需要用到的技术点
会话:多次请求与响应的过程
1,url地址传递参数,实现页面跟踪技术
格式:传一个参数的
url?名=值
传两个参数的
url?名=值 &名=值
关键代码
- web.xml之Servlet配置
bijian1013
javaweb.xmlServlet配置
定义:
<servlet>
<servlet-name>myservlet</servlet-name>
<servlet-class>com.myapp.controller.MyFirstServlet</servlet-class>
<init-param>
<param-name>
- 利用svnsync实现SVN同步备份
sunjing
SVN同步E000022svnsync镜像
1. 在备份SVN服务器上建立版本库
svnadmin create test
2. 创建pre-revprop-change文件
cd test/hooks/
cp pre-revprop-change.tmpl pre-revprop-change
3. 修改pre-revprop-
- 【分布式数据一致性三】MongoDB读写一致性
bit1129
mongodb
本系列文章结合MongoDB,探讨分布式数据库的数据一致性,这个系列文章包括:
数据一致性概述与CAP
最终一致性(Eventually Consistency)
网络分裂(Network Partition)问题
多数据中心(Multi Data Center)
多个写者(Multi Writer)最终一致性
一致性图表(Consistency Chart)
数据
- Anychart图表组件-Flash图转IMG普通图的方法
白糖_
Flash
问题背景:项目使用的是Anychart图表组件,渲染出来的图是Flash的,往往一个页面有时候会有多个flash图,而需求是让我们做一个打印预览和打印功能,让多个Flash图在一个页面上打印出来。
那么我们打印预览的思路是获取页面的body元素,然后在打印预览界面通过$("body").append(html)的形式显示预览效果,结果让人大跌眼镜:Flash是
- Window 80端口被占用 WHY?
bozch
端口占用window
平时在启动一些可能使用80端口软件的时候,会提示80端口已经被其他软件占用,那一般又会有那些软件占用这些端口呢?
下面坐下总结:
1、web服务器是最经常见的占用80端口的,例如:tomcat , apache , IIS , Php等等;
2
- 编程之美-数组的最大值和最小值-分治法(两种形式)
bylijinnan
编程之美
import java.util.Arrays;
public class MinMaxInArray {
/**
* 编程之美 数组的最大值和最小值 分治法
* 两种形式
*/
public static void main(String[] args) {
int[] t={11,23,34,4,6,7,8,1,2,23};
int[]
- Perl正则表达式
chenbowen00
正则表达式perl
首先我们应该知道 Perl 程序中,正则表达式有三种存在形式,他们分别是:
匹配:m/<regexp>;/ (还可以简写为 /<regexp>;/ ,略去 m)
替换:s/<pattern>;/<replacement>;/
转化:tr/<pattern>;/<replacemnt>;
- [宇宙与天文]行星议会是否具有本行星大气层以外的权力呢?
comsci
举个例子: 地球,地球上由200多个国家选举出一个代表地球联合体的议会,那么现在地球联合体遇到一个问题,地球这颗星球上面的矿产资源快要采掘完了....那么地球议会全体投票,一致通过一项带有法律性质的议案,既批准地球上的国家用各种技术手段在地球以外开采矿产资源和其它资源........
&
- Oracle Profile 使用详解
daizj
oracleprofile资源限制
Oracle Profile 使用详解 转
一、目的:
Oracle系统中的profile可以用来对用户所能使用的数据库资源进行限制,使用Create Profile命令创建一个Profile,用它来实现对数据库资源的限制使用,如果把该profile分配给用户,则该用户所能使用的数据库资源都在该profile的限制之内。
二、条件:
创建profile必须要有CREATE PROFIL
- How HipChat Stores And Indexes Billions Of Messages Using ElasticSearch & Redis
dengkane
elasticsearchLucene
This article is from an interview with Zuhaib Siddique, a production engineer at HipChat, makers of group chat and IM for teams.
HipChat started in an unusual space, one you might not
- 循环小示例,菲波拉契序列,循环解一元二次方程以及switch示例程序
dcj3sjt126com
c算法
# include <stdio.h>
int main(void)
{
int n;
int i;
int f1, f2, f3;
f1 = 1;
f2 = 1;
printf("请输入您需要求的想的序列:");
scanf("%d", &n);
for (i=3; i<n; i
- macbook的lamp环境
dcj3sjt126com
lamp
sudo vim /etc/apache2/httpd.conf
/Library/WebServer/Documents
是默认的网站根目录
重启Mac上的Apache服务
这个命令很早以前就查过了,但是每次使用的时候还是要在网上查:
停止服务:sudo /usr/sbin/apachectl stop
开启服务:s
- java ArrayList源码 下
shuizhaosi888
ArrayList源码
版本 jdk-7u71-windows-x64
JavaSE7 ArrayList源码上:http://flyouwith.iteye.com/blog/2166890
/**
* 从这个列表中移除所有c中包含元素
*/
public boolean removeAll(Collection<?> c) {
- Spring Security(08)——intercept-url配置
234390216
Spring Securityintercept-url访问权限访问协议请求方法
intercept-url配置
目录
1.1 指定拦截的url
1.2 指定访问权限
1.3 指定访问协议
1.4 指定请求方法
1.1 &n
- Linux环境下的oracle安装
jayung
oracle
linux系统下的oracle安装
本文档是Linux(redhat6.x、centos6.x、redhat7.x) 64位操作系统安装Oracle 11g(Oracle Database 11g Enterprise Edition Release 11.2.0.4.0 - 64bit Production),本文基于各种网络资料精心整理而成,共享给有需要的朋友。如有问题可联系:QQ:52-7
- hotspot虚拟机
leichenlei
javaHotSpotjvm虚拟机文档
JVM参数
http://docs.oracle.com/javase/6/docs/technotes/guides/vm/index.html
JVM工具
http://docs.oracle.com/javase/6/docs/technotes/tools/index.html
JVM垃圾回收
http://www.oracle.com
- 读《Node.js项目实践:构建可扩展的Web应用》 ——引编程慢慢变成系统化的“砌砖活”
noaighost
Webnode.js
读《Node.js项目实践:构建可扩展的Web应用》
——引编程慢慢变成系统化的“砌砖活”
眼里的Node.JS
初初接触node是一年前的事,那时候年少不更事。还在纠结什么语言可以编写出牛逼的程序,想必每个码农都会经历这个月经性的问题:微信用什么语言写的?facebook为什么推荐系统这么智能,用什么语言写的?dota2的外挂这么牛逼,用什么语言写的?……用什么语言写这句话,困扰人也是阻碍
- 快速开发Android应用
rensanning
android
Android应用开发过程中,经常会遇到很多常见的类似问题,解决这些问题需要花时间,其实很多问题已经有了成熟的解决方案,比如很多第三方的开源lib,参考
Android Libraries 和
Android UI/UX Libraries。
编码越少,Bug越少,效率自然会高。
但可能由于 根本没听说过、听说过但没用过、特殊原因不能用、自己已经有了解决方案等等原因,这些成熟的解决
- 理解Java中的弱引用
tomcat_oracle
java工作面试
不久之前,我
面试了一些求职Java高级开发工程师的应聘者。我常常会面试他们说,“你能给我介绍一些Java中得弱引用吗?”,如果面试者这样说,“嗯,是不是垃圾回收有关的?”,我就会基本满意了,我并不期待回答是一篇诘究本末的论文描述。 然而事与愿违,我很吃惊的发现,在将近20多个有着平均5年开发经验和高学历背景的应聘者中,居然只有两个人知道弱引用的存在,但是在这两个人之中只有一个人真正了
- 标签输出html标签" target="_blank">关于标签输出html标签
xshdch
jsp
http://back-888888.iteye.com/blog/1181202
关于<c:out value=""/>标签的使用,其中有一个属性是escapeXml默认是true(将html标签当做转移字符,直接显示不在浏览器上面进行解析),当设置escapeXml属性值为false的时候就是不过滤xml,这样就能在浏览器上解析html标签,
&nb