ROS通信架构(下)
ROS通信架构(下)
徐凯_xp
0.3832019.05.02 19:24:46字数 1,895阅读 261
将继续介绍ROS通信方式中的service、parameter server、actionlib。
Topic是ROS中的一种单向的异步通信方式。然而有些时候单向的通信满足不了通信要求,比如当一些节点只是临时而非周期性的需要某些数据,如果用topic通信方式时就会消耗大量不必要的系统资源,造成系统的低效率高功耗。
为了解决以上问题,service方式在通信模型上与topic做了区别。Service通信是双向的,它不仅可以发送消息,同时还会有反馈。所以service包括两部分,一部分是请求方(Clinet),另一部分是应答方/服务提供方(Server)。这时请求方(Client)就会发送一request,要等待server处理,反馈回一个reply,这样通过类似“请求-应答”的机制完成整个服务通信。
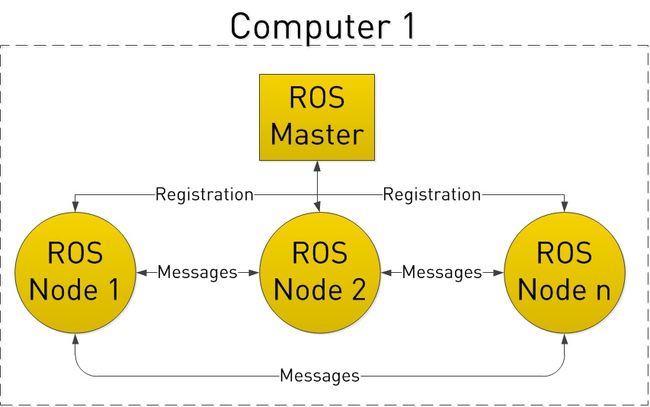
这种通信方式的示意图如下:
Node B是server(应答方),提供了一个服务的接口,叫做 /Service ,我们一般都会用string类型来指定service的名称,类似于topic。Node A向Node B发起了请求,经过处理后得到了反馈。

Service是同步通信方式,所谓同步就是说,此时Node A发布请求后会在原地等待reply,直到Node B处理完了请求并且完成了reply,Node A才会继续执行。Node A等待过程中,是处于阻塞状态的成通信。这样的通信模型没有频繁的消息传递,没有冲突与高系统资源的占用,
只有接受请求才执行服务,简单而且高效。
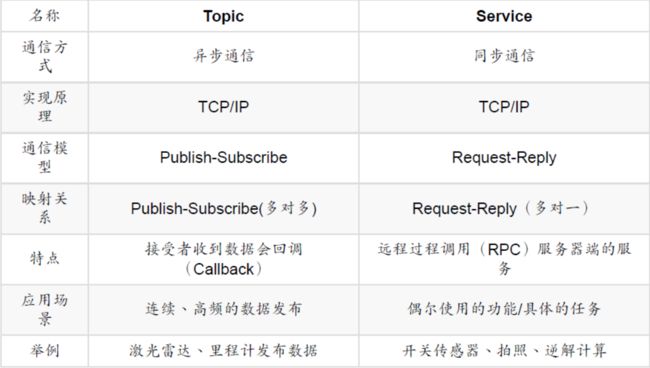
Topic VS service
Srv
类似msg文件,srv文件是用来描述服务(service数据类型的,service通信的数据格式定义在*.srv中。它声明了一个服务,包括请求(request)和响应(reply)两部分。
举例:
msgs_demo/srv/DetectHuman.srv
bool start_detect
---
my_pkg/HumanPose[] pose_data
msgs_demo/msg/HumanPose.msg,Srv只能嵌套msg,不能嵌套srv
std_msgs/Header header
string uuid
int32 number_of_joints
my_pkg/JointPose[]joint_data
msgs_demo/msg/JointPose.msg
string joint_name
geometry_msgs/Pose pose
floar32 confidence
以 DetectHUman.srv 文件为例,该服务例子取自OpenNI的人体检测ROS软件包。它是用来查询当前深度摄像头中的人体姿态和关节数的。srv文件格式很固定,第一行是请求的格式,中间用---隔开,第三行是应答的格式。在本例中,请求为是否开始检测,应答为一个数组,数组的每个元素为某个人的姿(HumanPose)。而对于人的姿态,其实是一个msg,所以srv可以嵌套msg在其中,但它不能嵌套srv。
修改部分文件
定义完了msg、srv文件,还有重要的一步就是修改package.xml和修改CMakeList.txt这些文件需要添加一些依赖:
** message_generation **
** message_runtime **
“**”所引就是新添加的依赖,又例如:
find_package(...roscpp rospy std_msgs ** message_generation **)
catkin_package(
...
CATJIN_DEPENDS ** message_runtime ** ...
...)
add_message_file(
FILES
** DetectHuman.srv **
** HumanPose.msg **
** JointPos.msg **)
** generate_messages(DEPENDENCIES std_msgs) **
添加的这些内容指定了srv或者msg在编译或者运行中需要的依赖。具体的作用我们初学者可不深究,我们需要了解的是,无论我们自定义了srv,还是msg,修改上述部分添加依赖都是必不可少的一步。
Paramater server
介绍另外一种通信方式——参
数服务器(parameter server)。与前两种通信方式不同,参数服务器也可以说是特殊的“通信方式”。特殊点在于参数服务器是节点存储参数的地方、用于配置参数,全局共享参数。参数服务器使用互联网传输,在节点管理器中运行,实现整个通信过程。
参数服务器,作为ROS中另外一种数据传输方式,有别于topic和service,它更加的静态。参数服务器维护着一个数据字典,字典里存储着各种参数和配置。
维护方式
参数服务器的维护方式非常的简单灵活,总的来讲有三种方式:
- 命令行维护
- launch文件内读写
- node源码
Action
Actionlib是ROS中一个很重要的库,类似service通信机制,actionlib也是一种请求响应机制的通信方式,actionlib主要弥补了service通信的一个不足,就是当机器人执行一个长时间的任务时,假如利用service通信方式,那么publisher会很长时间接受不到反馈的reply,致使通信受阻。当service通信不能很好的完成任务时候,actionlib则可以比较适合实现长时间的通信过程,actionlib通信过程可以随时被查看过程进度,也可以终止请求,这样的一个特性,使得它在一些特别的机制中拥有很高的效率
Action规范
动作的内容格式应包含三个部分,目标、反馈、结果。
- 目标
机器人执行一个动作,应该有明确的移动目标信息,包括一些参数的设定,方向、角度、速度等等。从而使机器人完成动作任务。 - 反馈
在动作进行的过程中,应该有实时的状态信息反馈给服务器的实施者,告诉实施者动作完成的状态,可以使实施者作出准确的判断去修正命令。 - 结果
当运动完成时,动作服务器把本次运动的结果数据发送给客户端,使客户端得到本次动作的全部信息,例如可能包含机器人的运动时长,最终姿势等等。
Action规范文件的后缀名是.action,它的内容格式如下:
# Define the goal
uint32 dishwasher_id # Specify which dishwasher we want to use
---
# Define the result
uint32 total_dishes_cleaned
---
# Define a feedback message
float32 percent_complete
Action实例详解
Actionlib是一个用来实现action的一个功能包集。我们在demo中设置一个场景,执行一个搬运的action,搬运过程中客户端会不断的发回反馈信息,最终完成整个搬运过程。
首先写handling.action文件,类比如上的格式.包括三个部分,目标,结果,反馈.如下:
# Define the goal
uint32 handling_id
---
# Define the result
uint32 Handling_completed
---
# Define a feedback message
float32 percent_complete
写完之后修改文件夹里CmakeLists.txt如下内容:
1. find_package(catkin REQUIRED genmsg actionlib_msgs actionlib)
2. add_action_files(DIRECTORY action FILES DoDishes.action)
generate_messages(DEPENDENCIES actionlib_msgs)
3. add_action_files(DIRECTORY action FILES Handling.action)
4. generate_messages( DEPENDENCIES actionlib_msgs)
修改package.xml,添加所需要的依赖如下:
1. actionlib
2. actionlib_msgs
3. actionlib
4. actionlib_msgs
然后回到工作空间 catkin_ws 进行编译:
定义了一个搬运的例子,首先写客户端,实现功能发送action请求,包括进行目标活动,或者目标活动.之后写服务器,实验返回客户端活动当前状态信息,结果信息,和反馈信息.从而实现action.
-
机器人操作系统ROS(二)-文件系统架构及概念
-
ROS简介
ROS的全名是Robot Operating System,即机器人操作系统。虽然名字里有个“操作系统”,但它并不...
-
ROS通信架构(上)
Node&Master 在ROS的世界里,最小的进程单元就是节点(node)。一个软件包里可以有多个可执行文件,可...
-
ROS机器人程序设计 | 期末知识点大总结
工作空间的框架是怎么样的?有几个文件夹? 一个包含功能包、可编辑源文件或编译包的文件夹。同时编译不同的功能包时非常...
-