广度优先搜索双队列通用编程模板
广度优先搜索主要用于解决求最短问题,如最短路径,最少变化步数问题等等,思想是从起点出发,按层遍历,直到搜索到目标或者已经搜索完全部区域。通常利用队列实现广度优先搜索,我这里使用的双队列法,用一个队列cur表示当前层,next表示由当前层扩展的下一层,用双队列有个好处是我们只需要定义一个全局变量level就能记录扩展的层数(即路径长度),如果要求输出具体最短路径的话,我们还需要利用一个unordered_map对象来保存路径树,为了避免搜索重复节点,我们需要标记已经搜索过的状态,这里利用unordered_set对象来保存已经搜索过的状态(注意如果unordered_map或unordered_set保存的是自定义的结构体时,我们需要自己定义==操作符合hash函数);我们还需要一个变量isfinsh来标记是否已经搜索到目标。
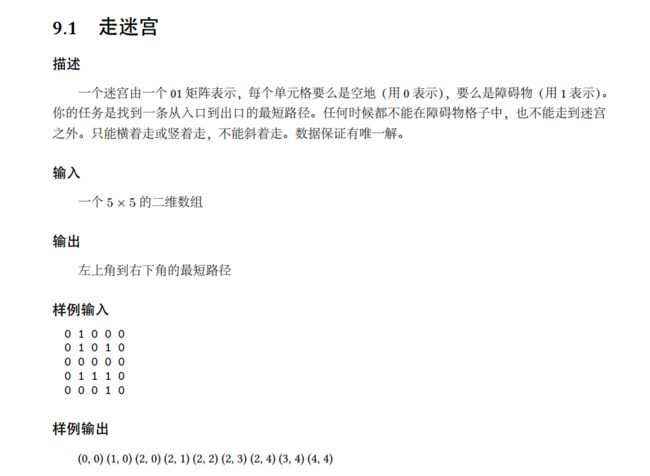
下面用一个具体的例子来说明广度优先搜索双队列编程模板的使用:
具体实现的程序如下:
#include "stdafx.h"
#include
#include
#include
#include
#include
using namespace std;
typedef struct node
{
int x;
int y;
node(int x=0,int y=0):x(x),y(y){};
bool operator==(const node &rhs) const
{
return x==rhs.x && y==rhs.y;
};
}state;
struct hash_func //自定义的hash 函数
{
size_t operator()(const node &myNode) const
{
return 999*myNode.x+myNode.y;
}
};
//根据father保存的路径树得到具体路径
void findPath(vector> &result,unordered_map &father,state start,state child)
{
state tmpState=child;
while(tmpState.x!=start.x || tmpState.y!=start.y)
{
int tmpPoint[2]={tmpState.x,tmpState.y};
vector tmpResult(tmpPoint,tmpPoint+2);
result.push_back(tmpResult);
tmpState=father[tmpState];
}
int tmpPoint[2]={tmpState.x,tmpState.y};
vector tmpResult(tmpPoint,tmpPoint+2);
result.push_back(tmpResult);
reverse(result.begin(),result.end());
}
vector> bfs(vector> &map,int &step,state &start,state &end)
{
vector> result;
if (map.size()<=0)
{
return result;
}
if (start.x==end.x && start.y==end.y)
{
return result;
}
int row=map.size();
int col=map[0].size();
int extend[4][2]={{0,1},{1,0},{0,-1},{-1,0}}; //按右-下-左-上顺时针方向扩展状态
//用于标记已经扩展过的状态,此处也可以利用一个二维bool数组,但是为了更具一般性,此处采用unordered_set
//注意:要使用unordered_set,unordered_map,node需要有定义的==运算符和hash函数。
unordered_set selected;
unordered_map father;//用于记录路径树
queue cur; //用于保存当前层的状态
queue next; //保存由cur扩展出的下一层状态
int level=0; //用于标记扩展的层数,可用于求最短路径长度
bool isFinish=false; //标记搜索是否结束
cur.push(start);
selected.insert(start);
while(!cur.empty()&&!isFinish)
{
++step;
while(!cur.empty()&&!isFinish)
{
state curState=cur.front();
cur.pop();
for(int i=0;i<4;++i)
{
int tmpr=curState.x+extend[i][0];
int tmpc=curState.y+extend[i][1];
if (tmpc<0 ||tmpc>=row ||tmpr<0 || tmpr>=col)
continue;
if (map[tmpr][tmpc]==1)
continue;
state tmpState(tmpr,tmpc);
if (tmpc==end.x && tmpr==end.y)
{
isFinish=true;
father[tmpState]=curState;
break;
}
if (selected.count(tmpState)==0)
{
next.push(tmpState);
father[tmpState]=curState;
selected.insert(tmpState);
}
}
}
swap(cur,next);
}
if (isFinish)
{
findPath(result,father,start,end);
}
return result;
}
int _tmain(int argc, _TCHAR* argv[])
{
int inputArray[5][5]={{0,1,0,0,0},{0,1,0,1,0},{0,0,0,0,0},{0,1,1,1,0},{0,0,0,1,0}};
vector> result;
vector> map;
for (int i=0;i<5;++i)
{
vector tmpMap(inputArray[i],inputArray[i]+5);
map.push_back(tmpMap);
}
int step=0;
state start(0,0);
state end(4,4);
result=bfs(map,step,start,end);
cout<<"最少需要走 "< 