基于种子区域生长的激光线段特征提取介绍
基于种子区域生长的激光线段特征提取介绍
A line segment extraction algorithm using laser data based on seeded region growing
open source
摘要:本次将介绍一种基于种子区域生长的激光线段特征提取方法,种子区域生长在图像处理中得到了广泛的应用。所要介绍的方法将不同于线段跟踪、霍夫变换和分割合并等等,总的步骤包括种子线段的提取、区域生长、重叠区域处理和端点生成。通过实际对比实验,表明所提方法在提取线段过程中的实时性、准确性和精确性方面,相比于传统的Iterative-End-Point-Fit 取得了更好的效果,所用数据集为室内实验室环境和走廊环境。所要叙述的内容分为以下几个方面
- 线激光提取线段的必要性,以及相关工作
- 基于种子区域生长的线段提取方法
- 实验比较
- 总结
线激光提取线段的必要性,以及相关工作
相比于视觉传感器,激光传感器具有数据可靠、抗干扰能力强,数据精度高等优点。线激光应用于SLAM,karto_SLAM、gmapping以及cartographer都取得了相当成功的成果,以及在移动和飞行机器人自主导航等领域也取得了不错的效果。在需要移动机器人完成更为复杂的任务时,比如被绑架时的全局定位,自主导航过程中的鲁棒定位,SLAM过程中的回环检测,都需要利用观测信息对环境进行更为高等的描述,而不仅仅是点云。就线激光而言,容易想到也易于实现的高等特征,就是线段特征,也有大量学者利用线段特征进行导航、全局定位以及SLAM。
早期就有大量学者关于线激光的线段特征提取做了大量工作,譬如线段跟踪、霍夫变换以及分割合并等等,在07年的Auton Robot 发表的一篇关于线段提取方法比较的论文:
Nguyen V, Gachter S, Martinelli A, et al. A comparison of line extraction algorithms using 2D range data for indoor mobile robotics. Auton Robot 2007; 23(2): 97-111
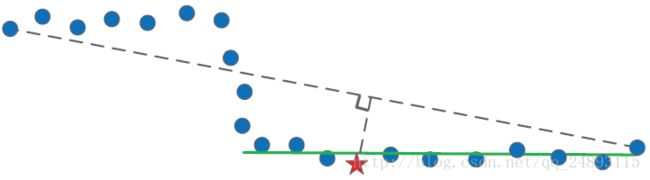
经过实验比较之后,得出分割合并的性能最优;鉴于此,在设计对比实验中,我们所提方法也将与分割合并进行比较。分割合并方法的示意图如下所示:

但是在实验过程中发现,这样的提取方法会产生如下问题,致使线段提取的精确性与准确性收到影响:
基于种子区域生长的线段提取方法
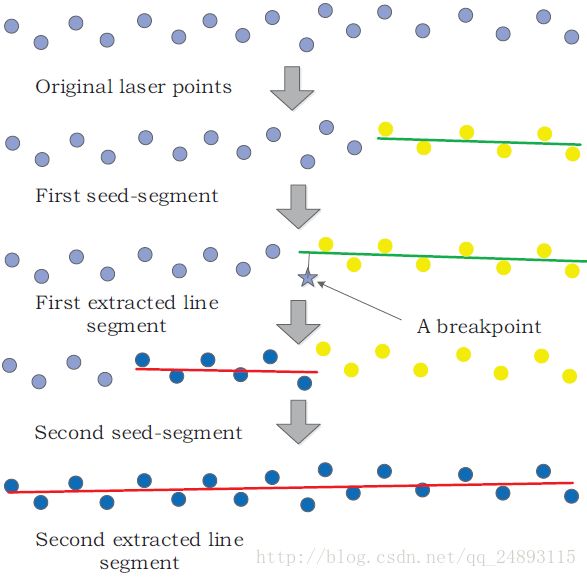
所提方法的整体步骤如下图所示:

正交最小二乘
直线的参数方程为: ax+by+c=0 a x + b y + c = 0 。传统最小二乘只考虑 Y Y 轴方向上的误差,而对于正交最小二乘应用于直线拟合,考虑的是点到直线的垂直距离,使得拟合直线不会受到病态方程的影响(微小的波动就会引起直线参数巨大的变化)。代价函数如下:
代价函数关于对参数 a,b,c a , b , c 求偏导,分别置为0,在经过化简之后就可以获得所要拟合直线的参数。
种子线段的获取
种子区域生长的第一步,需要先获得种子,而线段的种子可以理解为一段少量连续点云构成的线段(小线段)。在获取激光数据之后,可以依次选取连续 Snum S n u m 个点云进行判断是否符合种子线段的要求,如果符合,则进行区域生长获取整条线段,否则舍弃,重新进行种子线段的选取。判断的标准有两个:
1、点到直线的距离:
候选种子线段上各个点云到所拟合直线的距离小于阈值 ϵ ϵ , 阈值的选取与所用传感器有关:
2、点到点的距离
候选种子线段的点云往往较少,因此引起的误差可能较大,由下图所示:
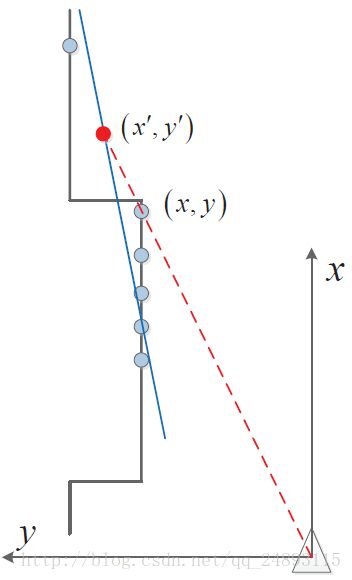
上图中,红色点即为了点云的预测位置,而蓝色的为实际位置,当候选种子线段的误差较大时,预测和实际位置之间的差距往往较大,所以在判定种子线段时需要增加这么一条判定条件。
其中预测点的位置,由当前点云的角度和所拟合的直线参数共同决定:
整体伪代码如下:

区域生长
区域生长在图像领域获得了较为广泛的应用。通过一些删选条件把具有相同特征的对象聚类在一起,最终获得分割或者分类的效果。在线段提取的过程中,同一线段上的点云具有的特征就行,点云到直线的垂直距离小于给定阈值。在本方法中,通过种子线段的向前和向后生长获得完整线段,具体如下伪代码所示:

重叠区域的处理
区域生长可以获得较为理想的分割效果,但是不尽如人意的是,环境错综复杂,经常会发生重叠区域,如上图所示。发生重叠的情况包括共线和不共线两种,上图所示的是共线情况,需要对两条共线的重叠线段合并为一条线段,而不共线的情况(比如墙角)则需要判断重叠部分的归属问题,即判断重叠部分的点云距离哪条线段更近(属于哪条),具体可以如下伪代码所示:

线段端点的获取
在其他的一些文献资料中,并未对线段端点有过多的描述,通过末端点云对线段端点进行描述,但是所提线段的末端点云包含包含噪声,本方法利用所获得的直线参数进行端点的生长,具体如下图所示:

通过末端点云正交所拟合的直线获取线段端点:
其中 ( x0,y0 x 0 , y 0 ) 末端点云位置。 然后, 由上述方程联立获得的交点( xs,ys x s , y s ) 如下所示:
实验配置与实验结果
实验环境与实验平台
室内实验室环境和走廊环境:

实验平台为P3DX移动机器人,传感器为UTM-30LX:

实时性比较
不失一般性,对于两个环境的数据集分别选取前1000帧数据进行实时性展示:

定量数据如下:
实验室环境(单位:毫秒)
| 项目 | 均值 | 方差 | 最小值 | 最大值 |
|---|---|---|---|---|
| 种子区域生长 | 0.445 | 0.057 | 0.013 | 0.695 |
| 分割合并 | 6.672 | 0.672 | 3.084 | 12.00 |
定量数据如下:
走廊环境(单位:毫秒)
| 项目 | 均值 | 方差 | 最小值 | 最大值 |
|---|---|---|---|---|
| 种子区域生长 | 0.329 | 0.129 | 0.073 | 0.6931 |
| 分割合并 | 5.193 | 1.039 | 2.848 | 7.791 |
准确性比较
准确性定义如下:
其中 NumMatch N u m M a t c h 表示正确提取的线段数量, NumExtLine N u m E x t L i n e 为全部提取的线段数量, TrueLines则表示环境中真实存在的线段数量一个理想的线段提取方法具有较高的 T r u e L i n e s 则 表 示 环 境 中 真 实 存 在 的 线 段 数 量 一 个 理 想 的 线 段 提 取 方 法 具 有 较 高 的 TR 和一个较低的 和 一 个 较 低 的 FR$。
定量比较结果如下所示:
实验室环境(单位:%)
| 项目 | TR T R | FR F R |
|---|---|---|
| 种子区域生长 | 93.55 | 2.59 |
| 分割合并 | 68.55 | 7.06 |
定量比较结果如下所示:
走廊环境(单位:%)
| 项目 | TR T R | FR F R |
|---|---|---|
| 种子区域生长 | 94.20 | 0 |
| 分割合并 | 71.01 | 4.08 |
精确性比较
精确性比较指代所提线段是否完整,不同于07年线段提取方法比较的文章。

由上图所示,基于种子区域生长的方法可以获得更多更完整的正确线段。
总结
至此,基于种子区域生长的直线段提取方法介绍完了,整个方法比较简单,参数较少。另外如果有不同的需要,例如所用传感器是否为全向,或者所用传感器是否存在噪点,需要对程序进行修改。
之后可以将所获得的线段特征应用于SLAM,混合特征于地图构建,全局定位或者更为鲁棒的自主导航过程。
有问题可加群 (移动机器人导航与控制群:199938556) 讨论交流,进群修改备注。