Google Cartographer 建立60000平米地下车库
系统:ubuntu server 16.04
ros 版本:kinetic
激光雷达:pavo 链接:http://www.siminics.com/
google cartographer 官方源码包:cartographer、cartographer-ros、ceres-solver;
demo.launch文件如下,因为是实际的建图,所以记得把use_sim_time设置为“false”,pavo激光发布的topic为“/scan",所以我把
revo_lds.lua文件如下,因为只使用的是激光雷达建图,所以修改tracking_frame = “laser_link”,published_frame = "laser_link";"laser_link"为pavo激光的frame;
修改雷达扫描数据的距离范围:
TRAJECTORY_BUILDER_2D.min_range = 0.1
TRAJECTORY_BUILDER_2D.max_range = 20.完整的revo_lds.lua如下:
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "laser_link",
published_frame = "laser_link",
odom_frame = "odom",
provide_odom_frame = true,
publish_frame_projected_to_2d = false,
use_odometry = false,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 1,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 0,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.submaps.num_range_data = 35
TRAJECTORY_BUILDER_2D.min_range = 0.1
TRAJECTORY_BUILDER_2D.max_range = 20.
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 1.
TRAJECTORY_BUILDER_2D.use_imu_data = false
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.linear_search_window = 0.1
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.translation_delta_cost_weight = 10.
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.rotation_delta_cost_weight = 1e-1
POSE_GRAPH.optimization_problem.huber_scale = 1e2
POSE_GRAPH.optimize_every_n_nodes = 35
POSE_GRAPH.constraint_builder.min_score = 0.65
return options编译运行google cartographer代码
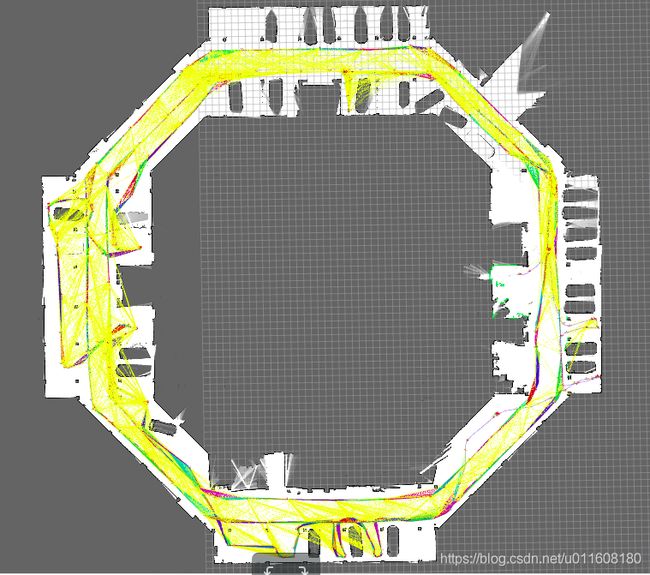
roslaunch cartographer_ros demo.launch建图效果:
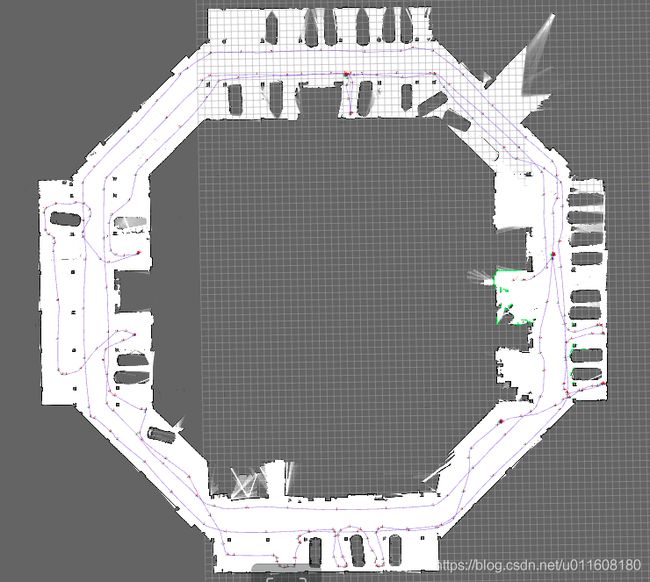
效果一:六边形地下车库(80m × 80m),推着小车走了3遍,其实没有必要的。第一遍回环检测就已经把地图建立OK了。
效果二:办公楼一楼(室外),四边形内边是玻璃,里面有些是树叉

效果三:60000平米小区地下车库,推着小车在地下车库走,部分横向的车道没有走,每栋楼有两部电梯。
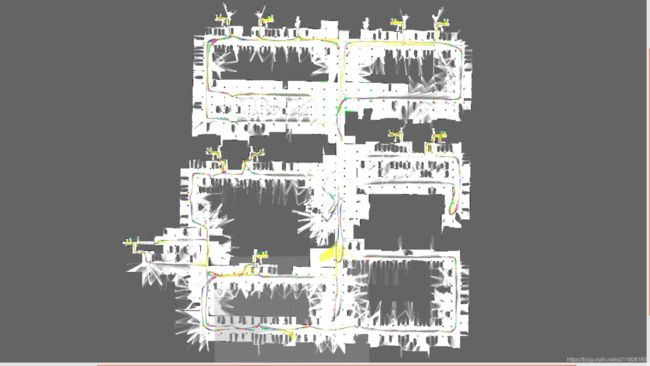
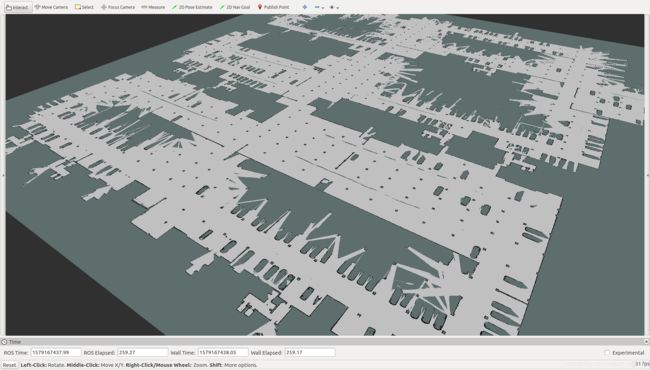
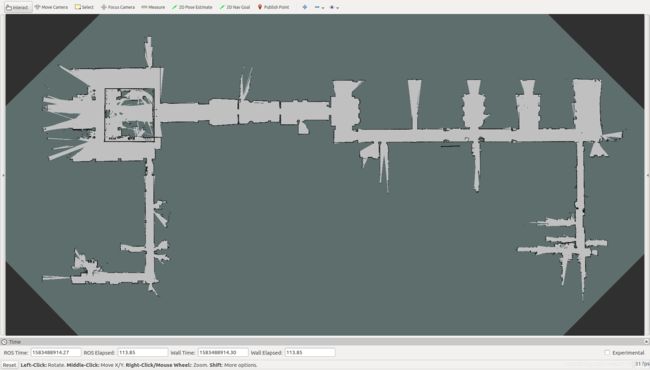
目前只使用激光建图基本OK,但是在狭长的走廊中50m左右,没有特征点的情况下,只使用激光建图会存在问题。
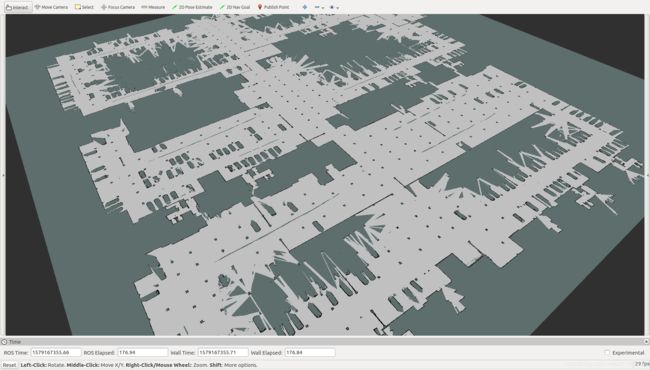
----------------------------------------------------更新2020-03-05------------------------------------------------------------------
某一个区域的地图(150m * 70m)