凸包算法分析
资料来源:
前言:
首先,什么是凸包?
假设平面上有p0~p12共13个点,过某些点作一个多边形,使这个多边形能把所有点都“包”起来。当这个多边形是凸多边形的时候,我们就叫它“凸包”。如下图: 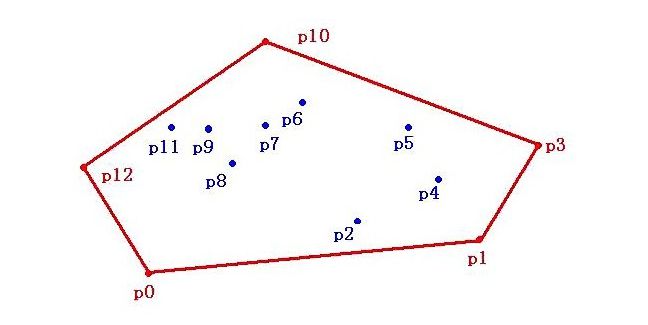
然后,什么是凸包问题?
我们把这些点放在二维坐标系里面,那么每个点都能用 (x,y) 来表示。
现给出点的数目13,和各个点的坐标。求构成凸包的点?
解一:穷举法(蛮力法)
时间复杂度:O(n³)。
思路:两点确定一条直线,如果剩余的其它点都在这条直线的同一侧,则这两个点是凸包上的点,否则就不是。
步骤:
- 将点集里面的所有点两两配对,组成 n(n-1)/2 条直线。
- 对于每条直线,再检查剩余的 (n-2) 个点是否在直线的同一侧。
如何判断一个点 p3 是在直线 p1p2 的左边还是右边呢?(坐标:p1(x1,y1),p2(x2,y2),p3(x3,y3))

当上式结果为正时,p3在直线 p1p2 的左侧;当结果为负时,p3在直线 p1p2 的右边。
解二:分治法
时间复杂度:O(n㏒n)。
思路:应用分治法思想,把一个大问题分成几个结构相同的子问题,把子问题再分成几个更小的子问题……。然后我们就能用递归的方法,分别求这些子问题的解。最后把每个子问题的解“组装”成原来大问题的解。
步骤:
- 把所有的点都放在二维坐标系里面。那么横坐标最小和最大的两个点 P1 和 Pn 一定是凸包上的点(为什么呢?用反证法很容易证明,这里不详讲)。直线 P1Pn 把点集分成了两部分,即 X 轴上面和下面两部分,分别叫做上包和下包。
- 对上包:求距离直线 P1Pn 最远的点,即下图中的点 Pmax 。
- 作直线 P1Pmax 、PnPmax,把直线 P1Pmax 左侧的点当成是上包,把直线 PnPmax 右侧的点也当成是上包。
- 重复步骤 2、3。
- 对下包也作类似操作。

然而怎么求距离某直线最远的点呢?我们还是用到解一中的公式:
设有一个点 P3 和直线 P1P2 。(坐标:p1(x1,y1),p2(x2,y2),p3(x3,y3))
对上式的结果取绝对值,绝对值越大,则距离直线越远。
注意:在步骤一,如果横坐标最小的点不止一个,那么这几个点都是凸包上的点,此时上包和下包的划分就有点不同了,需要注意。
解三:Jarvis步进法
时间复杂度:O(nH)。(其中 n 是点的总个数,H 是凸包上的点的个数)
思路:
- 纵坐标最小的那个点一定是凸包上的点,例如图上的 P0。
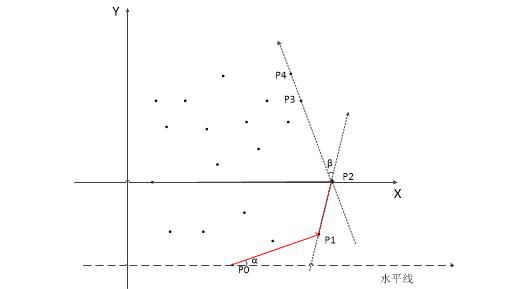
- 从 P0 开始,按逆时针的方向,逐个找凸包上的点,每前进一步找到一个点,所以叫作步进法。
- 怎么找下一个点呢?利用夹角。假设现在已经找到 {P0,P1,P2} 了,要找下一个点:剩下的点分别和 P2 组成向量,设这个向量与向量P1P2的夹角为 β 。当 β 最小时就是所要求的下一个点了,此处为 P3 。
注意:
- 找第二个点 P1 时,因为已经找到的只有 P0 一个点,所以向量只能和水平线作夹角 α,当 α 最小时求得第二个点。
- 共线情况:如果直线 P2P3 上还有一个点 P4,即三个点共线,此时由向量P2P3 和向量P2P4 产生的两个 β 是相同的。我们应该把 P3、P4 都当做凸包上的点,并且把距离 P2 最远的那个点(即图中的P4)作为最后搜索到的点,继续找它的下一个连接点。
解四:Graham扫描法
时间复杂度:O(n㏒n)
思路:Graham扫描的思想和Jarris步进法类似,也是先找到凸包上的一个点,然后从那个点开始按逆时针方向逐个找凸包上的点,但它不是利用夹角。 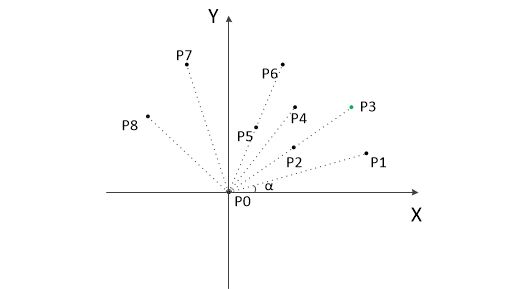
步骤:
- 把所有点放在二维坐标系中,则纵坐标最小的点一定是凸包上的点,如图中的P0。
- 把所有点的坐标平移一下,使 P0 作为原点,如上图。
- 计算各个点相对于 P0 的幅角 α ,按从小到大的顺序对各个点排序。当 α 相同时,距离 P0 比较近的排在前面。例如上图得到的结果为 P1,P2,P3,P4,P5,P6,P7,P8。我们由几何知识可以知道,结果中第一个点 P1 和最后一个点 P8 一定是凸包上的点。
(以上是准备步骤,以下开始求凸包)
以上,我们已经知道了凸包上的第一个点 P0 和第二个点 P1,我们把它们放在栈里面。现在从步骤3求得的那个结果里,把 P1 后面的那个点拿出来做当前点,即 P2 。接下来开始找第三个点: - 连接P0和栈顶的那个点,得到直线 L 。看当前点是在直线 L 的右边还是左边。如果在直线的右边就执行步骤5;如果在直线上,或者在直线的左边就执行步骤6。
- 如果在右边,则栈顶的那个元素不是凸包上的点,把栈顶元素出栈。执行步骤4。
- 当前点是凸包上的点,把它压入栈,执行步骤7。
- 检查当前的点 P2 是不是步骤3那个结果的最后一个元素。是最后一个元素的话就结束。如果不是的话就把 P2 后面那个点做当前点,返回步骤4。
最后,栈中的元素就是凸包上的点了。
以下为用Graham扫描法动态求解的过程: 
解五:Melkman算法
3、Melkman算法
首先要说的是:很多人都认为这个是最好的算法。这个算法可以在个点有序的前提下,每次获得一个点就可以将
先前的凸包改造成新的凸包,因此,这个是一个在线算法,它有着其他算法无法比拟的优势。1987年Melkman提出的
的凸包算法,它不再使用堆栈了,转而使用双向表,这为凸包算法的历史掀开了崭新的一夜。
具体实现我就不说了,相信看过上面几句话的,现在都已经忍不住要学习了。
今天看了一下午《算法艺术》和网上的一些资料,终于又有了一些理解,那就补充一下吧。之前都是模模糊糊的,现
在明白了,可能我现在理解的还是错误的,但是我还是要说出来:

melkman是用来求简单多边形的凸包算法,可以在线性时间求出最小凸包。而其他几种则可以求点集的凸包的算法。
如果要用Melkman算法来求点集的凸包,那么首先也是要排序的,通过排序可以形成一个简单的多边形,然后才可以
在线性的时间求出最小凸包。
所以最终得到的结论是:求点集的凸包,时间复杂度的底线是O(nlogn)。
最后讨论一下共线的问题:
假设有这么几个点
0 0
0 1
0 2
2 2
1 1
和这几个点
1 1
2 2
3 3
4 4
对于上面的两组数据,如果用卷包裹算法和Graham-Scan的极角排序法做,要求只输出凸包上的定点,会出现什么样
的问题??
如果用Graham-Scan的水平序来写,会不会出现同样的问题??
大家可以好好想想!!!!
还有很多凸包方面的算法,比如Jarvis步进法、增量、溶解、QuickHull等,这些多用于数学中,实践意义不大,所以
就不说了。有兴趣了解凸包算法的发展史,可以看看蓝点大神的《漫话二维凸包》。