【计算方法】线性方程组的数值解法
题外话:
我上学期做了笔记的科目好像都炸了。。像Java还有数据结构。计算方法也来做一个吧,反正迟早是要炸的
一、综述
线性方程组的解法可以分为两类:直接法和迭代法。
直接法通过有限四次运算得到精确解,比如克莱姆法则和高斯消元法
迭代法通过运用一定的规则进行迭代,逐次逼近,比如Jacobi迭代法,G-S迭代法以及超松弛迭代法(SOR法)
一般来说,直接法精确,迭代法运算快并且容易实现
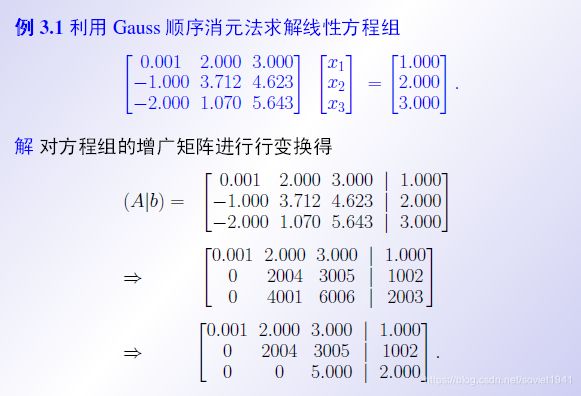
二、高斯消元法
高斯消元法是直接法的一种,在线性代数里讲过
基本思想是先拿第一行作为基准,然后对每一行乘以一个系数,使得这个系数乘以第一行后加上这一行,恰好能把该行第一列的数消掉。
然后第一列的数消掉以后,再对之后几列进行迫害。总之最后会消成一个上三角阵。
这种方法的总体过程是一个消元-回代的过程。
局限性:
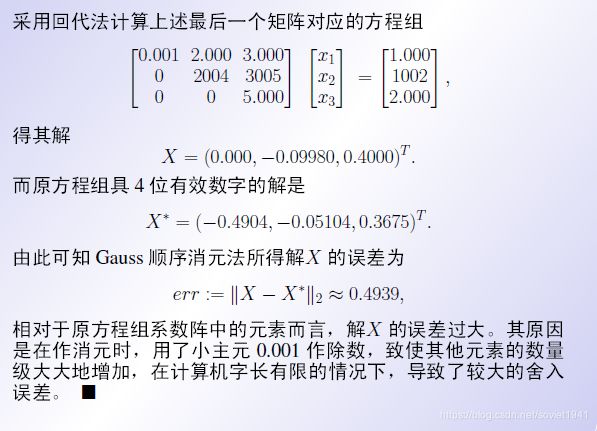
- 所有主元素都不能为0,否则运算将无法进行。
- 主元素绝对值不能过小,否则将引起较大舍入误差。(这里计算误差用的是2范数)
舍入误差:是指由于计算机表示位数的有限,计算机就会将其舍成一定的位数(例如四舍五入),引起舍入误差。
截断误差:是指计算某个算式时没有精确的计算结果,如积分计算,无穷级数计算等,我们只能截取有限项进行计算,这就是截断误差。
三、高斯选主元消元法
每次消元过程中,要拿来作为系数对照的最上一行最前一列元素,称为主元。
1、完全选主元法
完全选主元法把先把行之间做交换,再把列之间做交换,使得绝对值最大的值在主元位置。
2、选列主元法
完全选主元有点浪费时间,可以只做行的交换,使得头一列的绝对值最大的数跑到主元位置。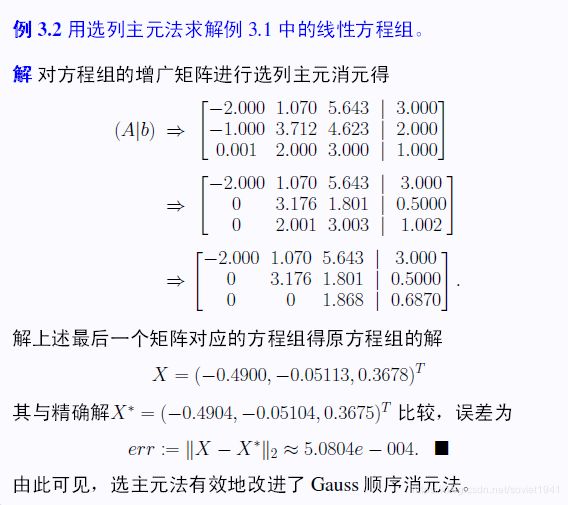
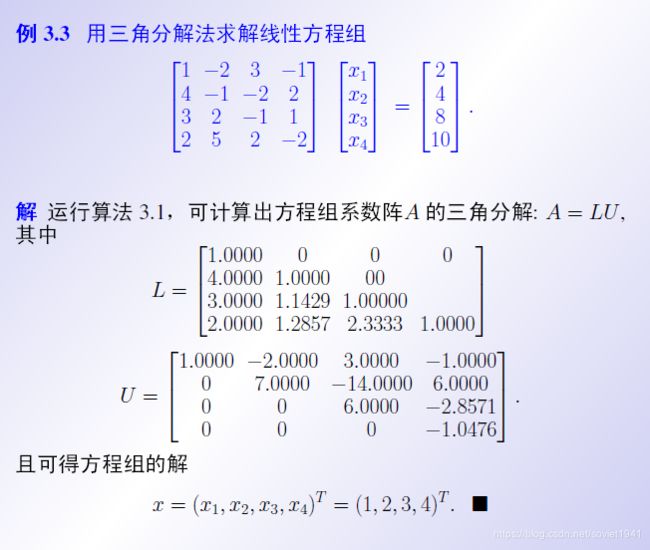
四、三角分解法
三角分解法属于直接法之一。
三角分解法的核心思想是将AX=B中的A拆解成A=LU,其中L是单位下三角阵,U是上三角阵。所以三角消元法又称为LU消元法
把A化成LU的思想依据来源高斯消元法,过程很复杂就不推导了
下面运用LU法的步骤
AX=B
=>LUX=B(A=LU)
=>LY=B(UX=Y)
其中LY=B和UX=Y形式在高斯消元法中喜闻乐见。
下面的问题是如何求L和U
LU=A采用待定系数法。求解顺序是U第一行,L第一列,U第二行,L第二列…
如此,便可求解出L和U,之后就是用LY=B求出Y,再用UX=Y求出X。
五、追赶法
追赶法常用于三对角阵,这在某些问题中很常见。是高斯迭代法的又一变种,属于直接法
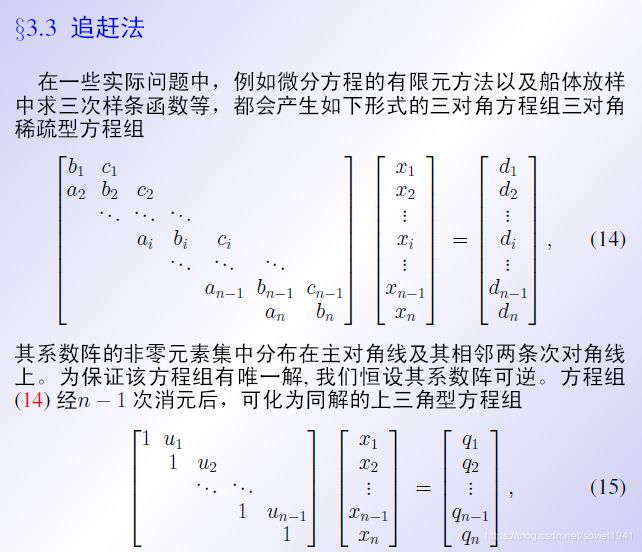
核心思想是把三对角阵化成上三角阵
化成上三角阵的步骤:
- 让b1化成1,第一行对应改变
- 借助第一行消去a2,第二行对应改变
- 让b2化成1,第二行对应改变
- 借助第二行消去a3,第三行对应改变
- 让b3化成1,第三行对应改变
……
消元的过程称为追,回代称为赶,因此这个过程也被称为追赶法。
条件数:用于衡量方程组是否对小扰动敏感,即是否病态。
cond(A)1 = ||A-1||1 ||A||1
cond(A)2 = ||A-1||2 ||A||2
cond(A)∞ = ||A-1||∞ ||A||∞
六、Jacobi迭代法
为了方便迭代,将AX=B中的A,分解成 A=L+D+U
其中,L是源自A的严格下三角阵,D是源自A的主元,U是源自A的严格上三角阵
(L+D+U)X = B
=>DX = -(L+U)X + B (首先,要保留含X项,因为要迭代;其次保留DX,因为D是对角矩阵好求逆)
=>X = -D-1 (L+U)X +D-1B (同除D)
=>X(k+1) = -D-1 (L+U)X(k) +D-1B
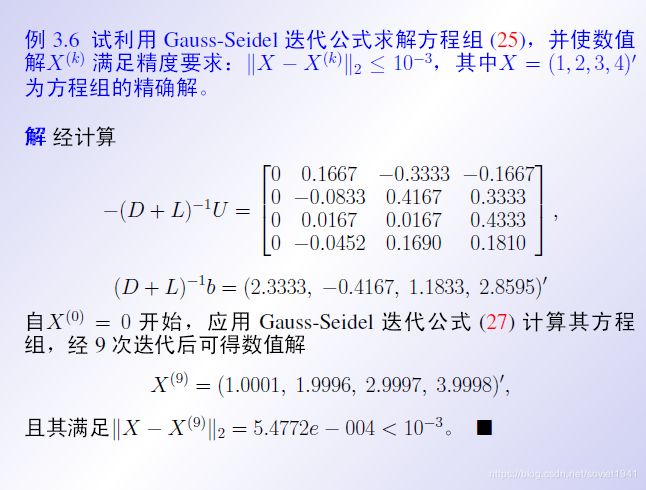
七、G-S迭代法
G-S迭代法全称Gauss-Seidel迭代法
这种方法认为把D也掺和进来精确度更高
(L+D+U)X = B
=>(D+L)X = UX + B (首先,要保留含X项,因为要迭代;其次保留DX,因为D是对角矩阵好求逆)
=>X = -(D+L)-1 UX +(D+L)-1B (同除D)
=>X(k+1) = -(D+L)-1 UX(k) +(D+L)-1B
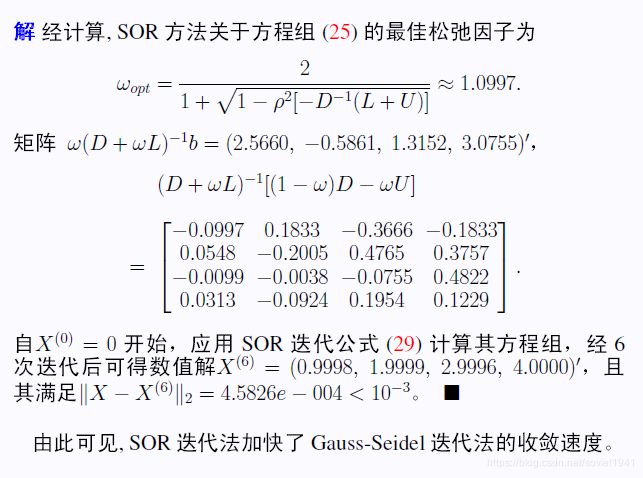
八、SOR法
对于G-S迭代法,等式右边同时加上DX(k),有
DX(k+1) = DX(k) + ( B - LX(k+1) - (D + U)X(k) )
引入松弛因子ω(当作是对后式进行调节),改写为
DX(k+1) = DX(k) + ω( B - LX(k+1) - (D + U)X(k) )
提取出系数,最后推导出
X(k+1) = (D+ωL)-1{ [(1-ω)D-ωU] X(k) + ωB}
这被称为SOR法,即逐次超松弛迭代法
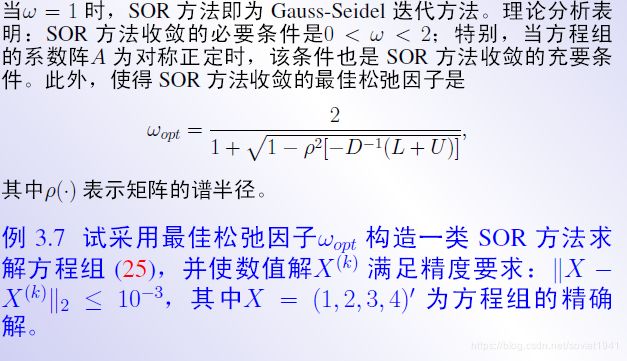
ω的选取可以最优化,公式见上。
九、迭代法收敛的条件
从计算方法第二章中得到启发,我们认为迭代法总可以写成如下迭代格式
X(k+1) = BX(k) + F
如果有
lim X(k) = X*
那么迭代格式就是收敛的
迭代格式收敛的充要条件:
谱半径ρ(B) < 1 <===> 迭代格式收敛
在某些情况下,计算谱半径是困难的,可以使用一些充分条件判定迭代收敛
存在一个矩阵范数使||B|| < 1 ==> 迭代格式收敛
同时,也可以根据以下定理
如果AX=B中的A严格对角占优,那么迭代格式收敛
A严格对角占优 ==> 迭代格式收敛
严格对角占优:主元素的绝对值大于该行其他值绝对值之和