ROS进阶学习手记 9 -- 关于坐标系统 tf
ROS tf 教程: 写一个tf 发布器
完成了tf的初步认识以后,我们将按照以下的大纲进行ROS_tf的学习:
ref: http://wiki.ros.org/tf/Tutorials
重要的一个参考是 古月居的博客: http://blog.csdn.net/hcx25909/article/details/9255001
1. 有关tf 的学习大纲
- Writing a tf broadcaster (C++)
This tutorial teaches you how to broadcast coordinate frames of a robot to tf.
- Writing a tf listener (C++)
This tutorial teaches you how to use tf to get access to frame transformations.
- Adding a frame (C++)
This tutorial teaches you how to add an extra fixed frame to tf.
- Learning about tf and time (C++)
This tutorial teaches you to use the waitForTransform function to wait for a transform to be available on the tf tree.
- Time travel with tf (C++)
This tutorial teaches you about advanced time travel features of tf
2. 开始本节
这一节,我们要用C++写一个 tf broadcaster,先创建Package:
Before we get started, you need to create a new ros package for this project. In the sandbox folder, create a package calledlearning_tf that depends on tf,roscpp,rospy andturtlesim:
$ cd %YOUR_CATKIN_WORKSPACE_HOME%/src $ catkin_create_pkg learning_tf tf roscpp rospy turtlesim
Build your new package before you can roscd:
$ cd %YOUR_CATKIN_WORKSPACE_HOME%/ $ catkin_make $ source ./devel/setup.bash
Let's first create the source files. Go to the package we just created:
$ roscd learning_tf
3. 写代码The Code
Go to src/ folder and fire up your favorite editor to paste the following code into a new file calledsrc/turtle_tf_broadcaster.cpp.
/* File_name: turtle_tf_broadcaster.cpp
* Node_Name: my_tf_broadcaster
* Pkg_Name: learning_tf
* For Tutorials: Writing a tf broadcaster (C++) - ROS wiki
* For ROS Hydro
* Author: Sonic, CIGIT of CAS
* Date: Ang 11, 2015
*/
#include
#include
#include
std::string turtle_name;
void poseCallback(const turtlesim::PoseConstPtr& msg){ //input: Post Pointer msg
static tf::TransformBroadcaster br;
//tf::StampedTransform stf;
tf::Transform transform;
tf::Vector3 v;
tf::Quaternion q;
v.setValue(msg->x, msg->y, 0.0);
q.setRPY(0, 0, msg->theta);
transform.setOrigin( v );
transform.setRotation( q );
tf::StampedTransform stf(transform, ros::Time::now(), "world", turtle_name); //Declare stf
br.sendTransform(stf); //send tf
//br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "world", turtle_name));
}
int main(int argc, char** argv){
ros::init(argc, argv, "my_tf_broadcaster");
if (argc != 2){ROS_ERROR("need turtle name as argument"); return -1;};
turtle_name = argv[1];
ros::NodeHandle node;
ros::Subscriber sub = node.subscribe(turtle_name+"/pose", 10, &poseCallback);
ros::spin();
return 0;
};
加入到Eclipse编辑:
Generate the Eclipse Files for dev. in Eclipse IDE
$ cd ~/catkin_ws //这实际上是Workspace的路径,catkin_ws = catkin workspace
$ catkin_make --force-cmake -G"Eclipse CDT4 - Unix Makefiles"
$ . ~/catkin_ws/devel/setup.bash
to generate the .project file and then run:
$ awk -f $(rospack find mk)/eclipse.awk build/.project > build/.project_with_env && mv build/.project_with_env build/.project
4. 准备运行这个broadcaster
Now that we created the code, lets compile it first. Open the CMakeLists.txt file, and add the following line at the bottom:
add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})
Build your package; at the top folder of your catkin workspace:
$ catkin_make
If everything went well, you should have a binary file called turtle_tf_broadcaster in your devel/lib/learning_tf folder.
If so, we're ready to create a launch file for this demo. With your text editor, create a new file called start_demo.launch at the path:~/catkin_ws/src/learning_tf/launch
and add the following lines:
5. Start your own tf broadcaster
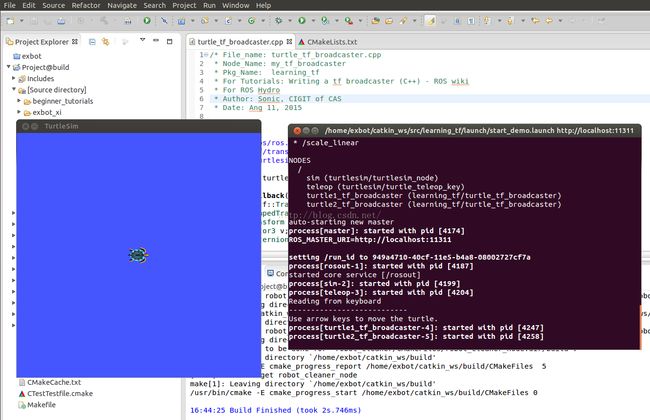
First, make sure you stopped the launch file from the previous tutorial (use ctrl-c). Now, you're ready to start your own turtle broadcaster demo:
$ roslaunch learning_tf start_demo.launchYou should see the turtle sim with one turtle.
6. Checking the results
Now, use the tf_echo tool to check if the turtle pose is actually getting broadcast to tf:
$ rosrun tf tf_echo /world /turtle1
This should show you the pose of the first turtle. Drive around the turtle using the arrow keys (make sure your terminal window is active, not your simulator window).
$ rosrun turtlesim turtle_teleop_keyIf you run tf_echo for the transform between the world and turtle 2, you should not see a transform, because the second turtle is not there yet. However, as soon as we add the second turtle in the next tutorial, the pose of turtle 2 will be broadcast to tf.To actually use the transforms broadcast to tf, you should move on to the next tutorial about creating a tf listener.
7. 关于这个broadcaster代码的说明:
/*
// #include for ros
// #include for tf::tf broadcaster
// #include for listen to turtlesim/Pose
这个tf的broadcaster就是把pose信息接收,再发布到tf
*Declare a std::string: turtle_name; //const std::string &child_frame_id
//Define CallBack function for Pose message: poseCallback(...)
*Declare tf/TransformBroadcaster: br;
*Declare tf/Transform: transform;
*Declare tf/Vector3: v;
*Declare tf/Quaternion: q;
v.setValue(msg->x, msg->y, 0.0);
q.setRPY(0, 0, msg->theta);
transform.setOrigin(v);
transform.setRotation(q);
*Declare tf/StampedTransform: stf(transform, ros::Time::now(), "world", turtle_name);
//StampedTransform (const tf::Transform &input, const ros::Time ×tamp, const std::string &frame_id, const std::string &child_frame_id)
br.sendTransform(stf);
//**CallBack function Conclusion:**
//msg -> Vector+Quaternion -> transform;
//transform+TimeStamp+Frame_id+ChildFrame_id -> StampedTransform (The most IMPT!)
//StampedTransform -> broadcaster
//Define the main function:
ros::init();
* Declare ros::NodeHandle node;
check the argc ?= 2
turtle_name = argv[1];
* Declare ros::Subscriber sub = node.subscribe(topic, 10, &poseCallback);
ros::spin();
return 0;
*/