目录
- 0. 引论
- 2. 牛顿法
- 2.1 单变量牛顿法
- 2.2 多变量牛顿法
- 3. 简化牛顿法
- 3.1 平行弦法
- 3.2 牛顿下山法
0. 引论
在工程中,很多的问题都可以归结为求解一组偏微分方程。描述如下:在某一个区域\(\Omega\)中,物理量\(u={u_1,u_2,\cdots,u_n}\)满足一组控制方程,并且在边界上满足若干条件:
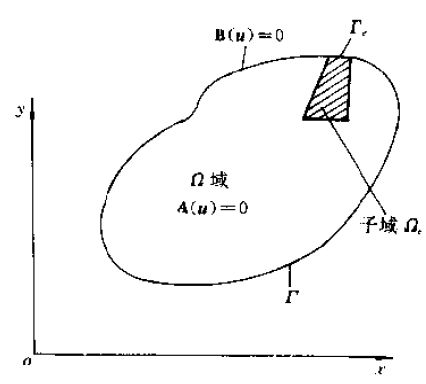
控制方程利用两个微分算子来表示\(A(u),B(u)\)。
\[ A(u)=\begin{cases} A_1(u)& =0 \\ A_2(u)& =0 \\ &\vdots \end{cases} \in \Omega \]
\[ B(u)=\begin{cases} B_1(u)& =0 \\ B_2(u)& =0 \\ &\vdots \end{cases} \in \partial \Omega \]
以上的问题,只有在求解域比较简单,控制方程形式比较特殊的时候才能求出解析表达,一般情况下,工程问题中的求解域是比较复杂的,控制方程往往是高阶非线性的,这个时候,只能借助于数值求解。偏微分方程的数值解法,常见的有有限元法,有限差分法,有限体积法等。这些数值解法的基本思想是用有限的自由度插值逼近真实解。不管哪一种数值方式,偏微分方程系统离散之后,形成的是常微分方程组或者代数方程组。
在工程中,对于时间维度往往是特别对待的,含有时间项的问题称为非定常问题,也叫瞬态问题,这类问题在空间离散之后,形成的是关于时间的常微分方程,然后利用一些推进求解的方法,将时间维度离散,转换成纯粹的代数方程。而控制方程不含时间项的问题称为稳态问题,对于稳态问题,将控制方程在空间离散之后,形成代数方程组。
可见,不论是那种问题,最后求解的是代数方程组。因此,如何准确高效的求解代数方程组就显得至关重要。这一部分的内容在数值分析里面有详细的介绍,对于工程师来说,一般不必去了解里面艰深的理论,但是,每一种求解方法的适用范围,求解速度,收敛性等重要特征,最好还是要了解。这样才能在使用的时候不至迷茫。
代数方程组可以简记为如下的形式:
\[ F(u)=b \]
还可以表示成为矢量的形式:
\[ Au=b \]
当系数矩阵A与变量u的取值没有关系时,问题时线性的,否在,时非线性问题。众所周知,非线性问题的求解时困难的!!
常用的线性方程组求解方法有:
- 直接法
-
- 高斯消去法、矩阵三角分解法(直接分解法、平方根方法、追赶法)、
- 迭代法
-
- 雅可比迭代、高斯-赛德尔迭代、超松弛法、块迭代法、共轭梯度法、最速下降法
常用的非线性方程组的求解方法有:
- 迭代法
-
- 二分法、不动点迭代、牛顿法、简化牛顿法、牛顿下山法、弦截法、抛物线法
- 多变量不动点迭代法、牛顿法
这里主要介绍牛顿法的一些特性。
2. 牛顿法
2.1 单变量牛顿法
对于单变量的牛顿法,大家已经很熟悉了,这里做一点简要的回顾。
方程
\[ f(x)=b \]
给定初值\(x^0\),利用迭代关系式:
\[ x^{k+1}=x^k-\frac{f(x)-b}{f'(x)} \]
经过一定次数的迭代,就可以收敛到其精确值\(x^*\)。
牛顿法存在两个问题:
- 当函数的二阶导数在精确解的邻域内小于0时,无法收敛到精确解。
- 当初值与精确解相差较大时,收敛困难。
2.2 多变量牛顿法
对与多变量牛顿法,其形式可以利用泰勒公式来推导。有\(F(u)=0\),假设其精确解为\(u^*\),则有:
\[ F(u^*)=0 \]
将F(u)在精确解处展开,如下:
\[ F(u^*)=F(u)+\nabla F(u)(u^*-u) \]
\[ [\nabla F(u)]^{-1}F(u)=u-u^* \]
因为精确解是不知道的,所以,利用一个初值代替:
\[ u^{k+1}=u^k-[\nabla F(u^k)]^{-1}F(u^k) \]
对于方程(10)所示的迭代式,影响其收敛性的一个重要指标是其Hesse矩阵。Hesse矩阵定义如下:
\[ G(u)=\nabla_u^2F(u) \]
对于多变量牛顿法,\(G(u)\)满足Lipschitz条件:
\[ ||G(y)-G(z)|| <= \beta||y-z|| \]
且\(G(u^*)\)正定,当\(u^0\)充分接近\(u^*\)时,迭代是收敛的,且是二阶收敛。
牛顿法的优点:收敛速度快
缺点:计算量大,收敛条件严格。
3. 简化牛顿法
牛顿法具有收敛速度快的特点,但是其缺点也很明显:一是牛顿法计算量很大,每次都要计算Hesse矩阵和\(F(x)\),并且Hessen矩阵有时计算较为困难。二是要求迭代初值在精确解附近,不然很难收敛。针对上面的问题,有一些改进的牛顿法。这里最为常用的是简化牛顿法(又称平行弦法)和牛顿下山法。
3.1 平行弦法
迭代式为:
\[ \begin{equation} \begin{cases} x^{k+1} & =\phi(x^k) \\ \phi(x^k)& =x^k-Cf(x^k) \end{cases} \end{equation} \]
其中,\(C=\frac{1}{f'(x_0)}\) 。该方法要求迭代式的一阶导数范数小于1才是局部收敛,且是线性收敛。
3.2 牛顿下山法
在迭代过程中,满足单调递减的要求的迭代方法称作下山法。即要求迭代过程中,始终有:
\[ ||f(x^{k+1})||<||f(x^k)|| \]
迭代式:
\[ \begin{equation} \begin{cases} x^{k+1} & =\phi(x^k) \\ \phi(x^k)& =x^k-\lambda\frac{f(x^k)}{f'(x^k)} \end{cases} \end{equation} \]
其中,\(\lambda(0<\lambda \le 1)\)称为下山因子。选择下山因子的时候,从\(\lambda=1\)开始,逐次减半进行试算,直到下降条件(14)成立为止。