offboard
无人机自动驾驶系列 Part 1:OFFBOARD控制以及Gazebo仿真
这里是视频教程:https://www.bilibili.com/video/av44348419
无人机可以使用机载电脑,通过OFFBOARD模式进行控制飞行。控制过程主要通过一连串的MAVROS命令来实现,而MAVROS是MAVLink的一层高级封装,从而免去了我们通过MAVLink控制无人机的繁琐。通过MAVROS,我们可以轻松实现很多功能,例如:起飞,降落,指点飞行,朝向控制等等。
本课中,我们会讲解一下如何通过机载电脑,在模拟器中控制你的无人机飞行。首先,我们先从配置环境开始讲起。
本课在 Ubuntu 16.04 LTS 以及ROS-Kinetic环境下测试通过;
在虚拟机环境下(VMWare,VirtualBox等)可能会出现问题,不建议使用虚拟机。
Environment Setup 环境配置
我们提供两种方式配置环境,你可以选择逐个安装依赖包,也可以直接使用Docker。
1. 源码编译
若选择使用此种安装方式,请确保网络连接 “稳定”。
基本依赖项
为了使用所有脚本的功能,请先按照如下安装依赖项:
pip install \
pandas \
jinja2 \
pyserial \
cerberus \
pyulog \
numpy \
toml \
pyquaternion
sudo apt install -y \
ninja-build \
exiftool \
python-argparse \
python-empy \
python-toml \
python-numpy \
python-yaml \
python-dev \
python-pip \
ninja-build \
protobuf-compiler \
libeigen3-dev \
genromfs
ROS-Kinetic
ROS (Robot Operating System) 是一个在机器人领域应用非常广泛的框架,它包含了很多有用的库以及工具,我们在本课以及接下来的所有课程中都会使用ROS Kinetic,首先,让我们安装ROS Kinetic。
安装 ROS Kinetic,请按照如下步骤:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full
sudo rosdep init
rosdep update
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
# install ros-gazebo plugins
sudo apt install ros-kinetic-gazebo-*
浏览 http://wiki.ros.org/kinetic/Installation/Ubuntu 以便了解更多信息
完成上列步骤后,你可以通过下面的命令来测试是否成功安装:
roscore
如果 ROS 安装成功,你可以看到下列结果:
... logging to /home/.ros/log/6a1b2330-2eb3-11e9-a39c-9cb6d0e498fb/roslaunch-gishr-XPS-15-9560-4452.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://XPS-15:44361/
ros_comm version 1.12.14
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.14
NODES
auto-starting new master
process[master]: started with pid [4463]
ROS_MASTER_URI=http://XPS-15:11311/
setting /run_id to 6a1b2330-2eb3-11e9-a39c-*********
process[rosout-1]: started with pid [4476]
started core service [/rosout
接下来,需要生成catkin工作空间,你所有的基于ROS的库都可以存放在此。
mkdir -p ~/catkin_ws/src
MAVROS
如之前所说,MAVROS是一层MAVLink与ROS通信的封装,旨在方便无人机与机载电脑通信。若要安装,你可以选择通过apt安装,或者从源码编译。请参考如下步骤:
# 你可以使用下列任何一种方法
# 方法 1
sudo apt-get install ros-kinetic-mavros ros-kinetic-mavros-extras
# 安装geographic lib :
wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh
sudo chmod a+x install_geographiclib_datasets.sh
./install_geographiclib_datasets.sh
# 方法 2
cd ~/catkin_ws
catkin init && wstool init src
rosinstall_generator --rosdistro kinetic mavlink | tee /tmp/mavros.rosinstall
rosinstall_generator --upstream mavros | tee -a /tmp/mavros.rosinstall
wstool merge -t src /tmp/mavros.rosinstall
wstool update -t src -j4
rosdep install --from-paths src --ignore-src -y
# 安装geographic lib :
sudo ./src/mavros/mavros/scripts/install_geographiclib_datasets.sh
sudo apt install ros-kinetic-catkin python-catkin-tools
catkin build
若要了解更多关于Mavros信息,请参考如下网址:
https://github.com/mavlink/mavros/blob/master/mavros/README.md#installation
PX4 Firmware
我们会在此课以及接下来的课程中使用 PX4 v1.8.0固件。
cd ~/catkin_ws/src
# 请保证网络连接正常,此步骤耗时较长
git clone https://github.com/PX4/Firmware.git
cd Firmware
git checkout v1.8.0
make posix_sitl_default gazebo
若以上步骤通过,此时会弹出Gazebo模拟器窗口,你会看到一架无人机出现在环境中,现在将窗口关闭即可。
修改环境变量,这样每次打开新的终端都可以保持环境变量一致:
# Use your favorite editor, we will be using gedit
# NOTE: you will need to use ROOT to edit bashrc
sudo gedit ~/.bashrc
# 在bashrc中,拷贝以下内容到bashrc尾端
source ~/catkin_ws/devel/setup.bash # 如果通过第一种方式安装了MAVROS,忽略此步。
source ~/catkin_ws/src/Firmware/Tools/setup_gazebo.bash ~/catkin_ws/src/Firmware/ ~/catkin_ws/src/Firmware/build/posix_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/catkin_ws/src/Firmware
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/catkin_ws/src/Firmware/Tools/sitl_gazebo
打开一个新终端,输入:
roslaunch px4 posix_sitl.launch
在另一个终端,输入:
roslaunch mavros px4.launch fcu_url:="udp://:[email protected]:14557"
或者你可以直接输入:
roslaunch px4 mavros_posix_sitl.launch
一个如下图所示的窗口会弹出:
在一个新终端,输入
rostopic echo /mavros/state
你可以看到:
header:
seq: 1
stamp:
secs: 730
nsecs: 280000000
frame_id: ''
connected: True
armed: False
guided: False
mode: "MANUAL"
system_status: 3
---
如果你看到上面的connected为True,那就代表你的Gazebo仿真环境配置成功,同时你的MAVROS通信也成功设置。
2. 使用Docker
如果你想直接跳过上面的步骤,可以使用Docker来运行仿真。Docker的使用较为简单,但是需要的资源较多,所以使用Docker的话GUI程序帧率以及分辨率会较低。我们使用VNC作为GUI交互,它的使用很广泛,可以用在包括Macos, Windows以及Android的多种平台上。
建议通过第一种方式配置环境以便获得最优效果。
使用VNC并获取Docker镜像
为了在Docker环境下使用GUI程序,需要在本地环境中安装VNC-viewer。你可以访问下面的网站了解更多信息:
https://www.realvnc.com/en/connect/download/viewer/
对于Linux系统来说,你可以直接下载下面的二进制文件:
wget https://www.realvnc.com/download/file/viewer.files/VNC-Viewer-6.19.107-Linux-x64
之后:
# NOTE the exact file name might differ
# 注意文件名可能会不一样
chmod +x VNC-Viewer-6.19.107-Linux-x64
./VNC-Viewer-6.19.107-Linux-x64
其他平台的安装很简单,我们在此跳过。VNC-viewer安装后,需要获取Docker镜像到你的本地环境下:
docker pull gaas/mavros-gazebo7-px4
若要使用Docker,打开一个终端并输入:
# 取决于硬件配置,此过程可能需要3-5分钟
docker run -p 6080:80 -p 5900:5900 gaas/mavros-gazebo7-px4:latest
在使用Docker过程中,视需求需要使用ROOT权限。
在另一个终端:
# 文件名或者文件路径可能会不一样
./VNC-Viewer-6.19.107-Linux-x64
你可以看到一个如下窗口弹出:
输入如下地址:
# 你可以更改使用的端口,在Docker运行时修改对应参数即可
127.0.0.1:5900
回车后,你可以看到一个LXDE桌面的Ubuntu系统窗口:
本课所需要的所有资料都可以在如下文件夹内找到:
/root/gi/GAAS/demo/tutorial_1
最后,每次打开Docker后,使用仿真前,你都需要手动执行下列命令:
cd /root/gi/px4/Firmware && make posix_sitl_default gazebo
仿真环境窗口弹出后,让我们暂时将它关闭。
现在,你可以直接跳到最后的 “控制无人机” 部分了!
OFFBOARD 控制
如果你使用Docker的话,可以直接跳到 “控制无人机” 部分。
首先,将仿真需要的文件获取到本地环境,文件包括无人机模型,世界模型以及其他一些你会用到的内容。此课程中我们将只关注基于python的MAVROS例子,如果你感兴趣的话可以试试GAAS提供的其他功能。
git clone [email protected]:generalized-intelligence/GAAS.git
你可以看到四个文件夹:
-
demo: 本课用到的所有内容都可以在此文件夹内找到;
-
hardware: 制作无人机所需的硬件资料可以在此文件夹找到;
-
simulator: 包含仿真用到的模型等;
-
software: 包含了例如ObstacleMap, SLAM,Local 以及Global path planner等内容。
你可以在各个文件夹内的README.md 中了解更多信息。
现在,将模型文件所在地址更新到环境变量中:
echo "export GAZEBO_MODEL_PATH=${GAZEBO_MODEL_PATH}:(GAAS_PATH)/simulator/models" >> ~/.bashrc
将模型以及配置文件拷贝到对应文件夹中:
cp -r (GAAS_PATH)/simulator/models/* ~/catkin_ws/src/Firmware/Tools/sitl_gazebo/models/
cp -r (GAAS_PATH)/simulator/worlds/* ~/catkin_ws/src/Firmware/Tools/sitl_gazebo/worlds/
cp -r (GAAS_PATH)/simulator/posix-config/* ~/catkin_ws/src/Firmware/posix-configs/SITL/init/ekf2/
控制无人机
如果你使用的是Docker,执行:
cd /root/gi/px4/Firmware && make posix_sitl_default gazebo
若make成功,Gazebo仿真窗口成功弹出,无人机出现在环境中,此时可以暂时将弹出的Gazebo窗口关闭。
接下来,无论你通过哪种方式配置的环境,都需要用同样的命令启动仿真环境,打开一个终端,输入:
roslaunch px4 mavros_posix_sitl.launch
同时,不要忘记检查MAVROS连接情况:
# 请确保 connected 结果为 True
rostopic echo /mavros/state
如果Gazebo仿真环境成功启动且MAVROS连接成功,在一个新的终端,改变路径到GAAS下的DEMO文件夹,执行python脚本:
# 如果你使用的是Docker
cd /root/gi/GAAS/demo/tutorial_1/1_px4_mavros_offboard_controller
python px4_mavros_run.py
# 如果你使用第一种安装方法
cd (GAAS_PATH)/demo/tutorial_1/1_px4_mavros_offboard_controller
python px4_mavros_run.py
你可以看到一个无人机逐渐起飞到3米高并悬停在此。在另外一个终端中:
python commander.py
你可以看到无人机按照下面的顺序飞行:
-
向右飞一米;
-
逆时针旋转90度;
-
降落。
或者你可以打开一个新的终端,使用提供的API来控制无人机:
# in folder '1_px4_mavros_offboard_controller'
python
# import packages
from commander import Commander
import time
# create Commander instance
con = Commander()
# control the drone to move 1 meter to the right
con.move(1,0,0)
# wait for 2 seconds
time.sleep(2)
# control the drone to move 1 meter to the front
con.move(0,1,0)
# wait for 2 seconds
time.sleep(2)
# control the drone to move 1 meter to the left
con.move(-1,0,0)
# wait for 2 seconds
time.sleep(2)
# control the drone to move 1 meter to the back
con.move(0,-1,0)
# wait for 2 seconds
time.sleep(2)
# control the drone to move 1 meter above
con.move(0,0,1)
# wait for 2 seconds
# land
con.land()
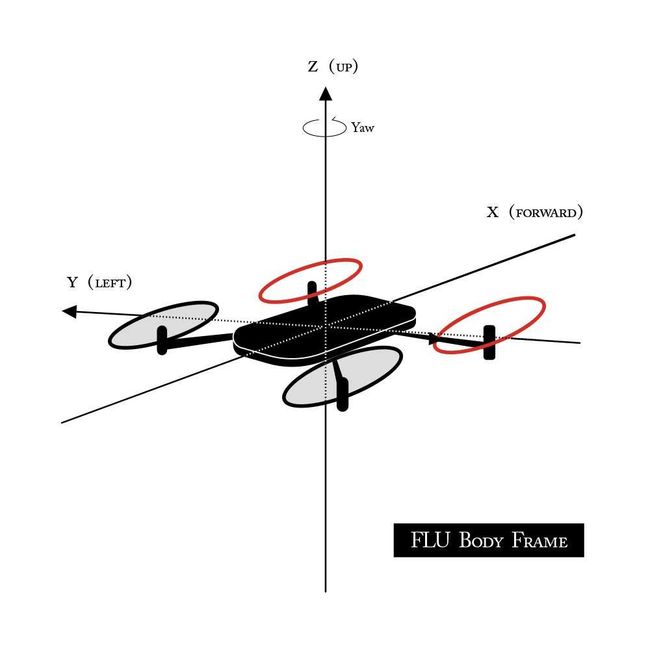
你可以看到无人机按照正方形运行,升高之后降落。你可能已经发现无人机运动时总是按照”当前“位置作为坐标系,此时运动的参考系为BODY_OFFSET_ENU 或 FLU(Forward,Left,Up),每次运动命令总会控制无人机按照机身坐标系进行运动。move 方法中的第一个参数控制无人机向前飞行(注意,向前飞行不等于向北飞行),第二个参数控制无人机向左飞行,第三个参数向上飞行。飞机飞行的默认参考系为BODY_OFFSET_ENU。如果你想使用LOCAL_ENU坐标系,此时运动按照的参考系是对于“起飞”时的位置,你可以在move方法中添加第四个参数,如下:
con = Commander()
# for BODY_OFF_SET_ENU or FLU frame
con.move(x,y,z)
# for LOCAL_ENU frame
con.move(x,y,z,BODY_OFF_SET_ENU=False)
接下来,你可以在模拟器中试试其他提供的API。
下一课,我们会讲解一下如果在模拟器环境中通过OFFBOARD模式制作一个3D模型。
阅读资料
若有兴趣,请阅读如下资料:
-
General ROS introduction: http://wiki.ros.org/
-
MAVROS: http://wiki.ros.org/mavros
-
MAVLINK: https://mavlink.io/
-
Gazebo: http://gazebosim.org/
-
rep-105: https://www.ros.org/reps/rep-0105.html
-
https://github.com/PX4/Devguide/blob/master/en/ros/external_position_estimation.md