庞特里亚金最小值原理求解能耗最小化的时间最优OBVP问题
本文依据论文A computationally efficient motion primitive for quadrocopter trajectory generation中所述的方法,整理出其中对OBVP问题的求解方法。所谓的OBVP即为optimal boundary value problem。
OBVP是特殊的BVP问题,最简单的BVP问题就是state sampled lattice planning,这其实也是一种lattice planner方法。常见的例子比如:给定初始位置和终点位置,求解多阶曲线方程。
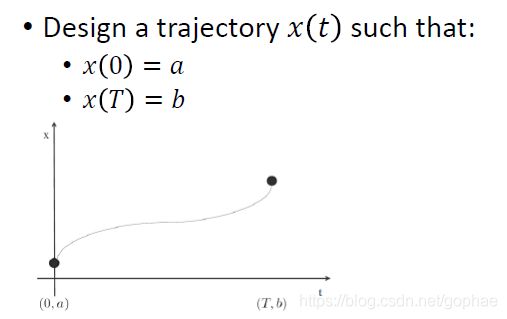
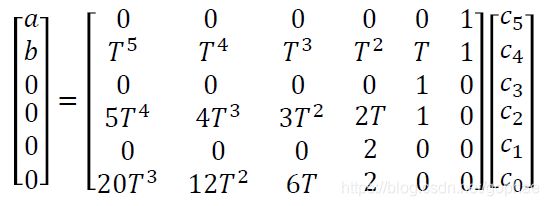
如果这条曲线是个五阶多项式:

给定初始位置和终点位置a,b,则系数求解为:
现在讨论OBVP方法,我们给定初始位置,和重点位置的,再给定一个objective function, 比如我们论文中描述的,objective function只考虑jerk的平方。那么问题的状态和位置速度加速度相关,系统的输入为jerk = u, 状态空间即为速度,加速度,jerk的函数,总结如下:
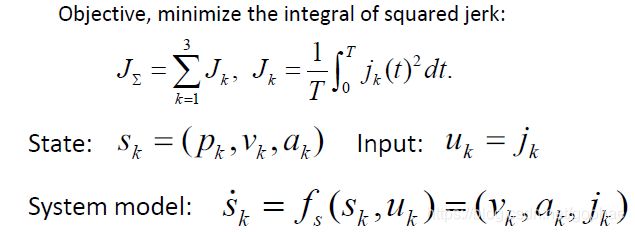
对于这个问题,我们用庞特里亚金最小值原理求解:
最小值原理的基本内容:
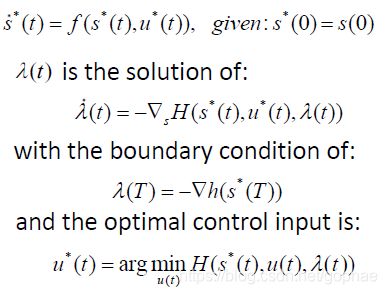
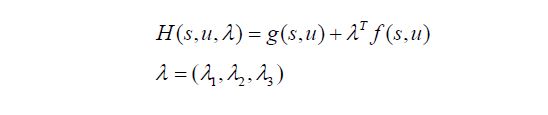
先写出hamiltonian,这个g就是objective function中的transition cost, f 就是状态方程(上面的system model):
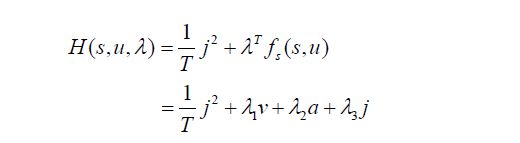
那么在本问题中,对应的g就是 j^2, f就是三个系统状态 a, v, j.写出如下的表达式:
根据上面的最小值原理基本内容:
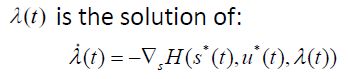
我们计算lamda梯度(H分别对 a,v,j求导数):

然后积分获得lamda表达式(这里对系数稍作了处理,是为了后面计算结果好看):
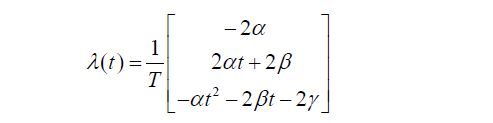
继续看最小值原理:
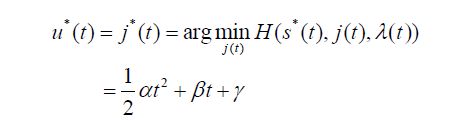
我们的lamda已经求解出来了,而且其中s是打星号(optimal)的,所以在H里面:
v和a都是知道一定是最优解的,那么只要算一下j是多少就行了。求一下一阶导数就能算出j的值,再带入H的表达式,得到:
对u做一次积分得到a, 在积分得到V,在积分得到p:

整理一下:
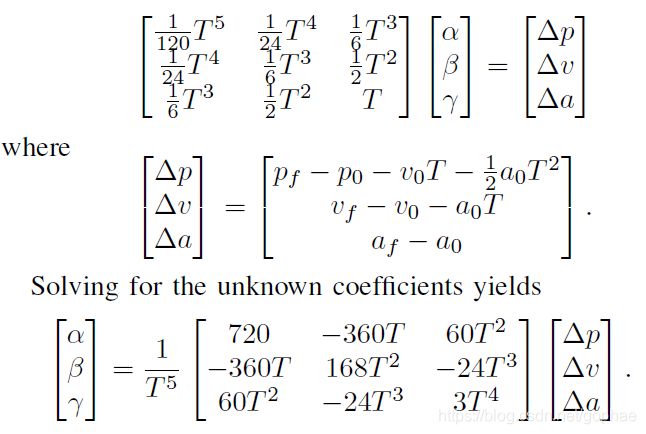
这里算逆矩阵可以自己验算一下:
%%
clear all; close all;
syms delta_p delta_v delta_a
syms T
Variants = [1/120*T^5 1/24*T^4 1/6*T^3;1/24*T^4 1/6*T^3 1/2*T^2;...
1/6*T^3 1/2*T^2 T];
inv_Variants = inv(Variants)
结果没问题:
inv_Variants =
[ 720/T^5, -360/T^4, 60/T^3]
[ -360/T^4, 168/T^3, -24/T^2]
[ 60/T^3, -24/T^2, 3/T]
然后得到alpha, beta, gamma后,带入objective function,
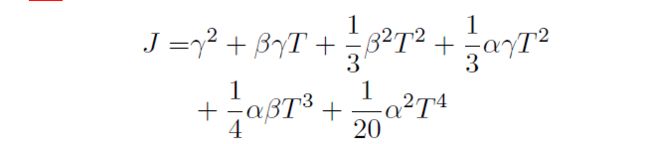
具体推导如下:
对cost function求一阶导数就知道T在什么时候可以取到minimum cost了,这里很有趣,objective function只和T相关。这也就是我们所谓的最小时间问题。
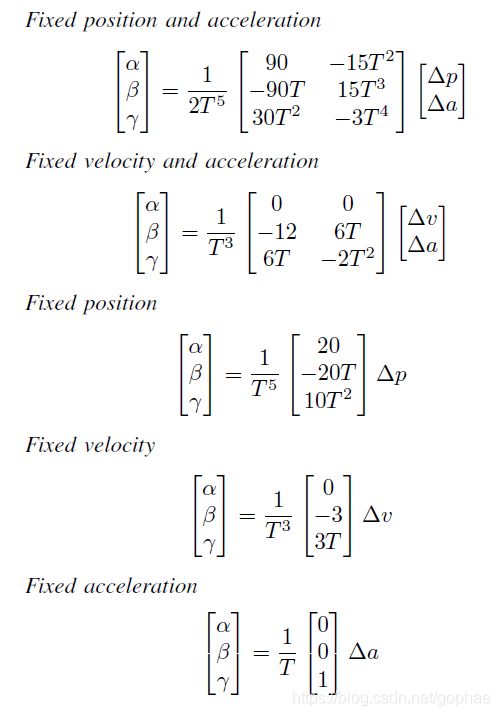
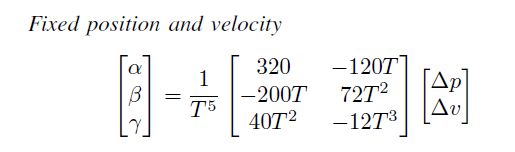
最后,还有其他终点的情况也要讨论一下,比如刚才的问题限制了终点的p,v,a,那么如果放开a的限制该如何求解。这里用到边界条件:
![]()
另外两个条件依旧不变,具体推导如下:
验证一下结果:
clear all; close all;
syms delta_p delta_v delta_a
syms T
Variants_2 = [1/120*T^5 1/24*T^4 1/6*T^3;1/24*T^4 1/6*T^3 1/2*T^2;...
1/2*T^2 - T T-2 1 - 2/T];
inv_Variants_2 = inv(Variants_2)
结果如下:
inv_Variants_2 =
[ 320/T^5, -120/T^4, -20/(3*(- T^2 + 2*T))]
[ -200/T^4, 72/T^3, -8/(3*(T - 2))]
[ 40/T^3, -12/T^2, T/(3*(T - 2))]
最后一项是0就不要管它了,所以解出表达式为:
其他的情况就不一一证明了: