IROS论文:开发用于自主电动汽车最佳路径规划的导航算法
第一部分
A汽车模型
硬件模块包含传感器 相继 超声波等模块
B导航模块
包含软件模块;
地图转换为数字格式,最终导航出一条自主线路.
导航核心是算法,在不同情况下测试各种算法.
基于ros,导航模块的实现和路线的创建受某些规范和要求的约束。
第二部分
D教授说简单算法已经满足要求.但随道路增多,算法需要改进优化.
图搜索算法
基于图拓扑图有很多算法:
1.算法总览
D*
A等
**2.A算法格式**
从时间空间方面对A算法的研究;
[1] D. Schilberg, “Vorlesung Smart Robotics”.
[16]S. Russell and P. Norvig, Künstliche Intelligenz: Ein moderner
Ansatz, München: Pearson Deutschland GmbH, 2012.
3.启发函数
不同情况使用不同启发函数,曼哈段 欧几里得
预处理节点
[15]Wikipedia, “A*-Algorithmus,” 23 07 2018. [Online]. Available:
https://de.wikipedia.org/wiki/A*-Algorithmus. [Accessed 02 10
2018].
[17]Wikipedia, “Manhatten-Metrik,” 10 07 2018. [Online]. Available:
https://de.wikipedia.org/wiki/Manhattan-Metrik. [Accessed 02 10
2018].
[18]A. Patel, “Heuristics,” [Online]. Available:
http://theory.stanford.edu/~amitp/GameProgramming/Heuristics.html.
[Accessed 02 10 2018].
[19]Wikipedia, “Chebyshev distance,” 15 10 2018. [Online]. Available:
https://en.wikipedia.org/wiki/Chebyshev_distance. [Accessed 27 10
2018].
第三部分 模型车导航的概念
A需求分析
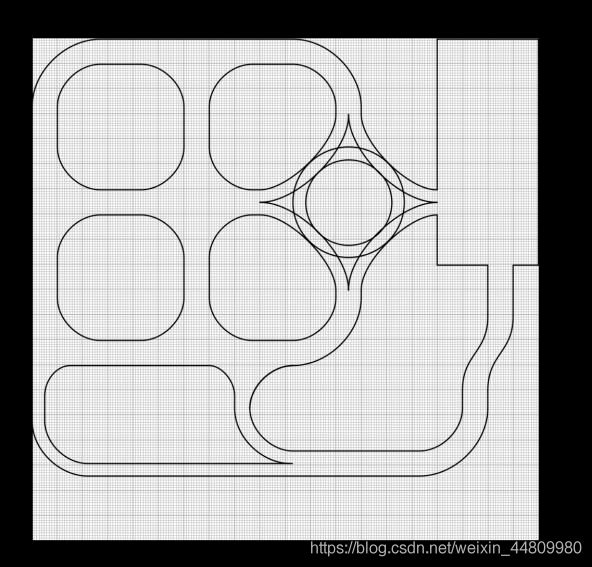
地图设计;
轨道的内容也有要求。主要道路必须有两条车道,并且必须有十字路口和环形交叉路口。
应为停车场和电动汽车充电站留出空间。
由于汽车的速度分为三个阶段[20],因此会有不同的速度区。
系统必须能够接受坐标作为目标输入。
车辆位置及其方向由另一个软件模块提供。
B 赛道设计
速度要求
半径要求
充电站位置
掉头空间
第四部分 导航模块的实现
A 基础设计
基于ROS kinetic
Python
图用的论文里的
算法自己扩展
车的位置数据由运动模块提供与导航模块有接口;
B 导航图设计为类
在这种情况下,最大的好处是,可以将不同道路网络的图形创建为此类的对象,并继承属性和方法。
这意味着该类中包含的函数和算法可以应用于任何图形(如果已在给定的结构中实现)
1.图的设计和生成

只能选择子节点本身作为起点和终点。 因此,必须开发一种软件解决方案,该解决方案允许使用坐标而不是子节点。 为此,将整个地图分为多个单独的多边形,这些多边形存储在图形的类中。 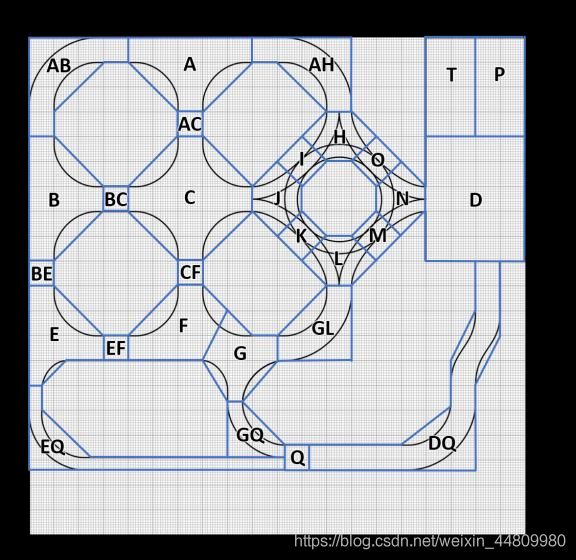
2.类属性
表1中以类图的形式显示了导航图的已创建属性的第一概览。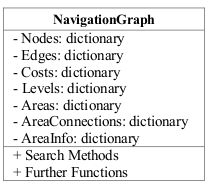
如先前所定义,节点是图的节点。字典的键由字符串形式的节点名称组成。相应的数据由一个列表组成,该列表包含两个元组。在第一个元组中,节点的x坐标和y坐标作为浮点变量存储在米中。这些坐标始终是交点的中心。在第二个元组中,有几个字符串变量。这些代表可以从中到达交点的可能的基点。
边缘表示各个节点之间的边缘。相应的值包含一个列表,该列表又包含几个元组。每个元组代表该节点到另一个节点的连接。每个元组中存储三个变量:连接的节点,到达该节点必须执行的命令以及连接的开销。节点和命令存储为字符串,成本存储为浮点变量。
成本表示从一个节点移动到另一节点所需的成本。各个边的成本已包含在字典边中,因此该字典有不同的用途。它包含从图形的任何节点到达另一个节点所需的时间。在这种情况下,键由四个字符串变量组成。起始节点,起始路线,目标节点和目标路线。相应的值是一个float变量,它表示所需的时间(以秒为单位)。搜索算法并不直接要求这些成本来计算路线。但是,它们可以用于精确的启发式。
3.搜索算法
BFS算法介绍.

A*算法使用四种不同启发函数.
4.车辆导航的方法
在搜索路径前,必须有一些函数来实现导航功能.
第五部分 导航模块的测试
测试并比较了实现的不同搜索方法和功能。两种类型测试,笔记本脱机和树莓派在线.
结论
A*算法更适合