STM32F407_FreeRTOS_LwIP调试详解二:源码调试
本例使用的是STM32F407_FreeRTOS_LwIP调试详解一:Cube_MX生成工程中所生成的工程,在此工程基础上,添加tcpecho.c文件:
- Main
- MX_FREERTOS_Init
- StartDefaultTask
- tcpecho_init
###main
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration----------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
System_Info();
/* USER CODE END 2 */
/* Call init function for freertos objects (in freertos.c) */
MX_FREERTOS_Init();
/* Start scheduler */
osKernelStart();
/* We should never get here as control is now taken by the scheduler */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
###MX_FREERTOS_Init
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* Create the thread(s) */
/* definition and creation of defaultTask */
osThreadDef(defaultTask, StartDefaultTask, osPriorityNormal, 0, 128);
defaultTaskHandle = osThreadCreate(osThread(defaultTask), NULL);
/* definition and creation of TaskList */
osThreadDef(TaskList, TaskList_Stats, osPriorityIdle, 0, 128);
TaskListHandle = osThreadCreate(osThread(TaskList), NULL);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
}
###StartDefaultTask
void StartDefaultTask(void const * argument)
{
/* init code for LWIP */
MX_LWIP_Init();
/* USER CODE BEGIN StartDefaultTask */
/*Initialize tcp echo server*/
tcpecho_init();
vTaskList((char *)&pcWriteBuffer);
printf("\r\n任务名 任务状态 优先级 剩余栈 任务序号\r\n");
printf("%s\r\n",pcWriteBuffer);
for(;;)
{
HAL_GPIO_TogglePin(LED0_GPIO_Port,LED0_Pin);
osDelay(500);
}
/* USER CODE END StartDefaultTask */
}
###tcpecho_init
/*-----------------------------------------------------------------------------------*/
void tcpecho_init(void)
{
// sys_thread_t n;
sys_thread_new("tcpecho_thread", tcpecho_thread, NULL, DEFAULT_THREAD_STACKSIZE, TCPECHO_THREAD_PRIO);
// printf("return=%d \r\n",n);
}
/*-----------------------------------------------------------------------------------*/
/*-----------------------------------------------------------------------------------*/
static void tcpecho_thread(void *arg)
{
struct netconn *conn, *newconn;
err_t err, accept_err;
struct netbuf *buf;
void *data;
u16_t len;
LWIP_UNUSED_ARG(arg);
/* Create a new connection identifier. */
conn = netconn_new(NETCONN_TCP);
if (conn!=NULL)
{
/* Bind connection to well known port number 7. */
err = netconn_bind(conn, NULL, 7);
if (err == ERR_OK)
{
/* Tell connection to go into listening mode. */
netconn_listen(conn);
while (1)
{
/* Grab new connection. */
accept_err = netconn_accept(conn, &newconn);
/* Process the new connection. */
if (accept_err == ERR_OK)
{
while (netconn_recv(newconn, &buf) == ERR_OK)
{
do
{
netbuf_data(buf, &data, &len);
netconn_write(newconn, data, len, NETCONN_COPY);
}
while (netbuf_next(buf) >= 0);
netbuf_delete(buf);
}
/* Close connection and discard connection identifier. */
netconn_close(newconn);
netconn_delete(newconn);
}
}
}
else
{
netconn_delete(newconn);
printf(" can not bind TCP netconn\r\n");
}
}
}
/*-----------------------------------------------------------------------------------*/

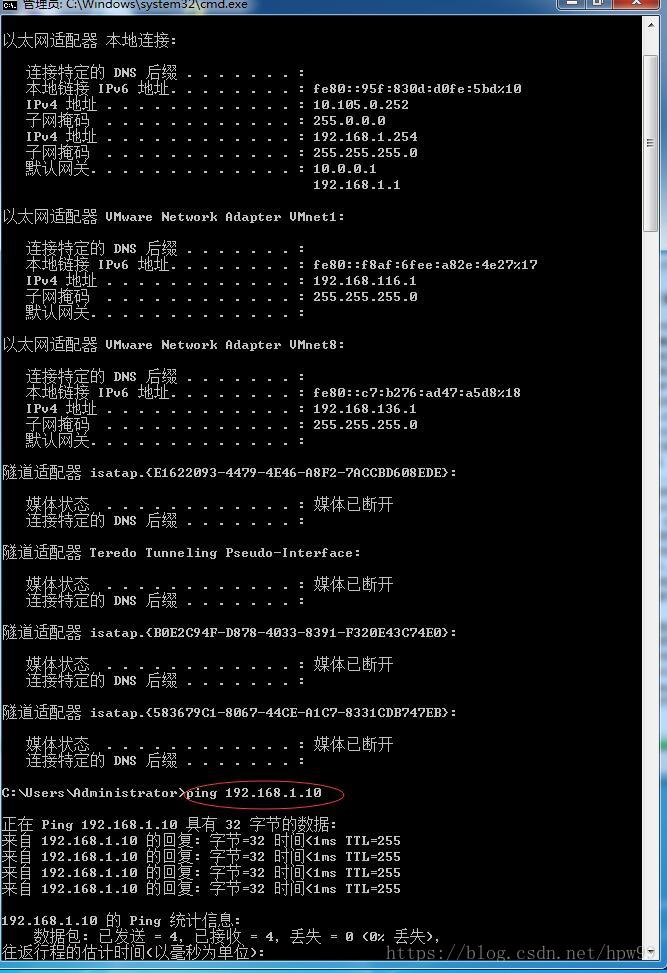
ping 192.168.1.10
TCP测试工具连接并成功返回

工程链接:https://download.csdn.net/download/hpw99/10434724
参考文档:https://download.csdn.net/download/hpw99/10437622