树莓派4:基于NCNN的火焰检测
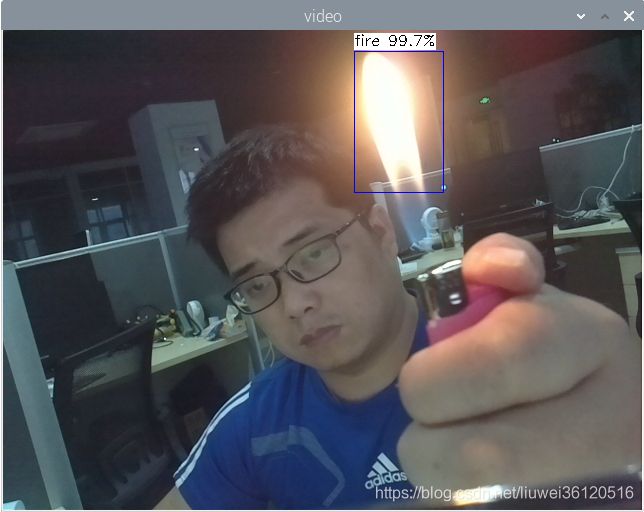
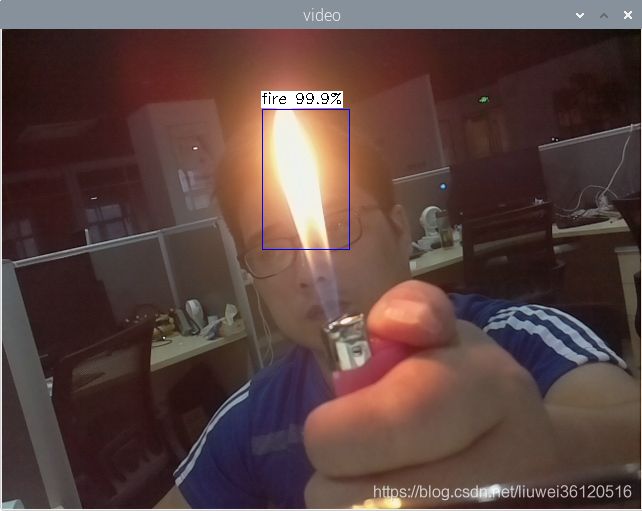
在前面两篇关于火焰检测的文章中,最终的效果不是很好,为了提高火焰检测的效果,又搜集了一些火焰数据,训练的网络由之前的yolov3-tiny改为mobilev2-yolov3,最终在树莓派上利用NCNN推算框架,比之前的效果要好很多,如图:
下面把实现的步骤和大家分享下:1、火焰数据集链接:
https://pan.baidu.com/s/1VypCAODfMvEexU-kDooSgw
提取码:feo2
链接:https://pan.baidu.com/s/1e32KPWI71PeFadUPmeEvHQ
提取码:ihsj2、在darknet下训练训练的cfg和model文件如果需要联系我。
3、在树莓派上部署NCNN官方提供了在树莓派上的编译说明,按照这个说明是可以编译起来的,安装依赖:
sudo apt-get install git cmake
sudo apt-get install -y gfortran
sudo apt-get install -y libprotobuf-dev libleveldb-dev libsnappy-dev libopencv-dev libhdf5-serial-dev protobuf-compiler
sudo apt-get install --no-install-recommends libboost-all-dev
sudo apt-get install -y libgflags-dev libgoogle-glog-dev liblmdb-dev libatlas-base-dev然后下载NCNN:
git clone https://github.com/Tencent/ncnn.git
cd ncnn编辑CMakeList.txt文件,添加examples和benchmark:
add_subdirectory(examples)
add_subdirectory(benchmark)
add_subdirectory(tools)然后就可以按照官方文档进行编译了,官方提供的pi3 toolchain在4代Raspbian上可以直接使用,最新版的NCNN会自动使用OpenMP:
cd <ncnn-root-dir>
mkdir -p build
cd build
cmake -DCMAKE_TOOLCHAIN_FILE=../toolchains/pi3.toolchain.cmake -DPI3=ON ..
make -j44、模型转换
cd <ncnn-root-dir>
cd build
cd tools/darknet
./darknet2ncnn mobilenetV2-yolov3.cfg mobilenetV2-yolov3.weights mobilenetV2-yolov3.param mobilenetV2-yolov3.bin 15、运行
cd <ncnn-root-dir>
cd build
cd example
./mobilenetV2-yolov36、部分代码
#include "net.h"
#include "platform.h"
#include 7、结果分析目前测试效果还比较满意,但是每帧处理的时间需要0.3s左右,还不能实时,接下来的目标是达到实时检测,并尝试别推理框架,比如MNN和TNN。
