ros连接真实机器人的过程及建图
1.连接机器人的wifi
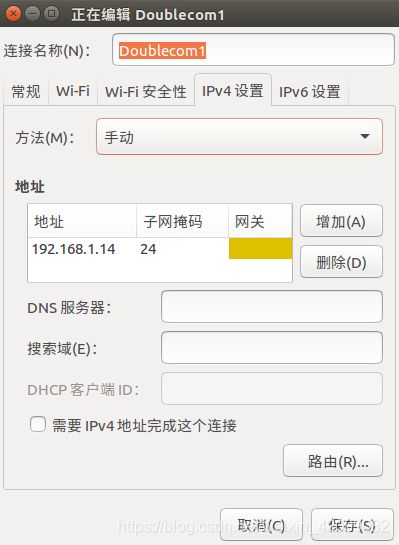
(对于第一次连接,需要修改ip地址,在wifi下拉框,编辑连接中,选中机器人热点,修改IPv4设置,修改地址,168.192.1.15,(或者16,17等)作为路由器识别电脑的地址,多个电脑同时连时,注意设置不同,避免冲突,子网掩码为24,然后保存即可.
然后就可以连接上机器人的热点了.我设置的是14
下位机运行建图导航,需要上位机修改bashrc
sudo gedit ./.bashrc
在后面添加
export ROS_MASTER_URI=http://192.168.1.11:11311 //这是机器人的地址
export ROS_HOSTNAME=192.168.1.14 //这是机器人识别本机的地址
这个 ROS_HOSTNAME需要和你所设置的地址一致
(可以设置多个机器人的配置,其他不用的将其注释即可)
然后关闭所有终端,重新启动终端,使用source ./.bashrc 让修改的参数生效
(ps:注意,此时修改后,后面只单独启动本机roscore是启动不了的.需要这两句注释)
这是我的配置方式可以按照这种方式
#robot adress if you use robot roscore
export ROS_MASTER_URI=http://192.168.1.11:11311
export ROS_HOSTNAME=192.168.1.14
#local adress if you use local roscore
#export ROS_MASTER_URI=http://localhost:11311
#export ROS_HOSTNAME=localhost
启动ros机器人的程序
两种方式:1.连接机器人的服务器
administrator是机器人端的用户名后面192.168.1.11是机器人端的地址
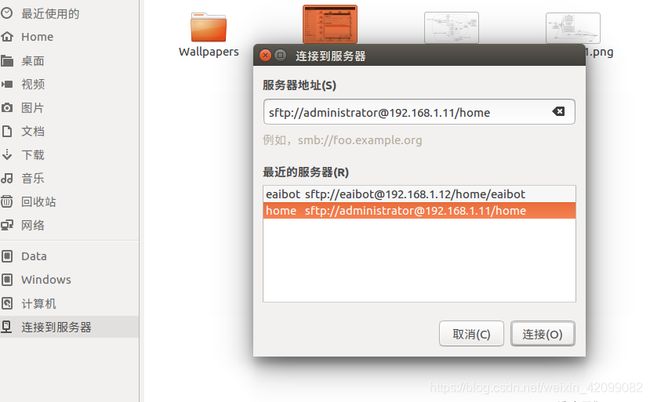
进去机器人的盘中,空白处右键选择打开远程终端,输入密码即可
2.在本地打开终端,通过ssh的方式进入
采用录制bag包的方式建图
1.bag的录制
首先,确保下位机雷达处于开启状态。(目前机器人的自启动包含雷达的启动)
录制bag的命令:
录制前,可以先使用rostopic list 查看所需的话题是否启动
rosbag record -O bag1.bag /tf /odom /scan /imu/data_raw
(-o : 代表是录制指定的话题的方式,在采用谷歌建图的方式时,我们需要录制这四个话题)
(-a : 代表记录所有话题,由于话题信息比较多,-a数据量太大,故一般值录所需要的话题信息,对于一开始,不知道所需哪些话题时,可以先使用-a 进行全部录制,然后在读包的时候,通过查看rqt_graph查看,建图过程需要哪些话题,然后再次录包时,只需录制对应的话题即可.)
bag1.bag是要保存的bag的名字
开始录制后,既可用遥控或者键盘控制机器人开始扫图,启动和停止过程缓慢,平稳移动,尽量不要原地打转,可以走弧线进行转弯,录制包与包之间,上个包的终点是下个包的启动,及停止录包后和开始录包前不要移动机器人.后面建图更方便.
要结束录制只要ctrl + c结束掉就行
对于建比较大的地图,可以采用多个录包的方式
录制完成后,从下位机拷贝至上位机
使用rosbag play --clock 包名