算法导论第十一(11)章散列(Hash)表
11.1直接寻址表
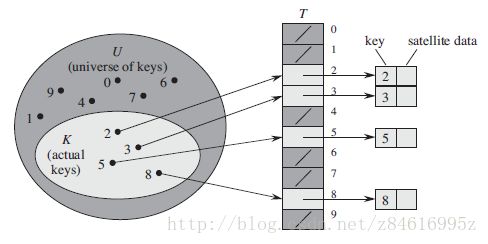
关键字集合U = { 0, 1, ..., m - 1 },实际的关键字集合K。
用一个数组T[0..m - 1],其中每个位置对应U中的一个关键字k。
把关键字k映射到槽T(k)上的过程称为散列。
散表表仅支持INSERT、SEARCH、DELETE操作。
11.1-1假设一动态集合S用一个长度为m的直接寻址表T表示。请给出一个查找S中最大元素的过程。你所给的过程在最坏情况下的运行时间是多少?
查找指定元素所用时间为O(1),如果找表中最大值,那么最坏情况下需要循环遍历散列表中所有有效值以确定最大值。运行时间为O(m).
struct Hash* direct_address_search(struct Hash *T[], int key)
{
int Max=0;
while (key!=MAX)//MAX表示散列表容量最大值
{
if (T[key]!=NULL&&Maxkey)
{
Max=T[key]->key;
}
key++;//key既可以表示直接寻址表T的下标,也可以表示关键字
}
}
11.1-2位向量是一个仅包含0和1的数组。长度为m的位向量所占空间要比包含m个指针的数组少得多,请说明如何用一个位向量表示一个包含不同元素(无卫星数据)的动态集合。字典操作的运行时间应为O(1).
核心思想:如果插入元素x,那么把位向量的第x位设置为1,否则为0. 如果删除元素x,那么把位向量的第x位设置为0。
#include
#include
#define INT_BIT 32
typedef struct {
unsigned int *table;
int size;
} BitMap;
BitMap * bitmap_create(int max)
{
BitMap *bitmap = (BitMap *)malloc(sizeof(BitMap));
bitmap->size = max / INT_BIT + 1;
bitmap->table =(unsigned int *) calloc(sizeof(int), bitmap->size);
return bitmap;
}
void bitmap_insert(BitMap *bitmap, int key)
{
bitmap->table[key / INT_BIT] = bitmap->table[key / INT_BIT] |(1 << (key % INT_BIT));
}
void bitmap_delete(BitMap *bitmap, int key)
{
bitmap->table[key / INT_BIT] &= ~(1 << (key % INT_BIT));
}
int bitmap_search(BitMap *bitmap, int key)
{
return bitmap->table[key / INT_BIT] & (1 << (key % INT_BIT));
}
void bitmap_print(BitMap *bitmap)
{
printf("-----\n");
int i;
for (i = 0; i < bitmap->size; i++)
if (bitmap->table[i] != 0)
printf("%d: %d\n ", i, bitmap->table[i]);
printf("-----\n");
}
int main(void)
{
BitMap *bitmap = bitmap_create(1024);
bitmap_insert(bitmap, 15);
bitmap_insert(bitmap, 10);
bitmap_insert(bitmap, 520);
bitmap_insert(bitmap, 900);
bitmap_delete(bitmap, 10);
bitmap_print(bitmap);
printf("%d\n", bitmap_search(bitmap, 68));
printf("%d\n", bitmap_search(bitmap, 520));
return 1;
}
参考资料来自:
直接寻址表的位向量表示
直接寻址表的位向量表示
11.1-3试说明如何实现一个直接寻址表,表中各元素的关键字不必都不相同,且各元素可以有卫星数据。所有三种字典操作(INSERT,DELETE和SEARCH)的运行时间应为O(1)
(不要忘记DELETE要处理的是被删除对象的指针变量,而不是关键字)。
#include
#include
#define LEN sizeof(struct Hash)
#define MAX 6
struct Hash{
int key;
int satellite;
}Data; //元素结构体,有关键字和卫星数据
struct Hash* direct_address_search(struct Hash *T[], int key); //散列表查找操作
void direct_address_insert(struct Hash *T[], struct Hash *x); //散列表插入操作
void direct_address_delete(struct Hash *T[], struct Hash *x); //散列表删除操作
void print_table(struct Hash *T[]); //打印散列表(为了方便查看删除操作后,散列表的变化)
int main(){
int i, key, satellite;
struct Hash *data[MAX];
struct Hash *d;
for(i = 0; i < MAX; i++){
data[i] =new struct Hash [LEN];
data[i] = NULL;
}
for(i = 0; i <= 3; i++){
d = new struct Hash[LEN];
printf("Input the key_value:\n");
scanf("%d", &key);
printf("Input the satellite:\n");
scanf("%d", &satellite);
d->key = key;
d->satellite = satellite;
direct_address_insert(data, d);
}
print_table(data);
printf("请输入待查找的元素\n");
scanf("%d", &key);
d = direct_address_search(data, key);
if (d)
{
printf("the key is %d, and its satellite is %d\n", d->key, d->satellite);
}
else
{
printf("没有找到\n");
}
if (d)
{
direct_address_delete(data, d);
}
print_table(data);
delete d;
for(i = 0; i < MAX; i++)
delete data[i];
print_table(data);
return 0;
}
//直接返回下标为key的元素
struct Hash* direct_address_search(struct Hash *T[], int key){
return T[key];
}
//直接将元素插入下标key的位置里
void direct_address_insert(struct Hash *T[], struct Hash *x){
T[x->key] = x;
}
// 将要删除的元素所在的位置指向空指针
void direct_address_delete(struct Hash *T[], struct Hash *x){
T[x->key] = NULL;
}
//打印直接寻址表
void print_table(struct Hash *T[]){
int i;
for(i = 0; i < MAX; i++){
if(T[i] != NULL){
printf("key is %d, and its satellite is %d\n", T[i]->key, T[i]->satellite);
}
}
}
参考资料来自: 直接寻址表的字典操作
11.1-4我们希望在一个非常大的数组上,通过利用直接寻址的方式来实现一个字典。开始时,该数组中可能包含一些无用信息,但要对整个数组进行初始化是不太实际的,因为该数组的规模太大。请给出在大数组上实现直接寻址字典的方案。每个存储对象占用O(1)空间;SEARCH,INSERT和DELETE操作的时间均为O(1);并且对数据结构初始化的时间为O(1).(提示:可以利用一个附加数组,处理方式类似于栈,其大小等于实际存储在字典中的关键字数目,以帮助确定大数组中某个给定的项是否有效)
思路:我们用T表示大数组,用S表示含有所有有效数据的数组作为辅助栈。T的关键字作为下标,而数组T的值为数组S的下标,相反地,数组S的值为关键字,同时也是数组T的下标。这是一种循环形式 。设有关键字x,如果T[x]=y,那么S[y]=x.
#include
using namespace std;
#define MAX 100
#define LEN sizeof(struct hash)
struct hash{
int key;
};
struct Stack
{
int STack[MAX];
int top;
};
void Init(struct Stack&s)
{
s.top=-1;
}
struct hash * search(struct hash Hash[],struct Stack&s,int k)
{
if (Hash[k].key>=0&&Hash[k].key<=s.top&&s.STack[Hash[k].key]==k)
{
cout<<"已经找到"<key;
if (search(Hash,s,k))
{
cout<<"待插入的数据已经在散列表中!"<key]=s.STack[s.top];
Hash[s.STack[p->key]].key=p->key;
p->key=0;
s.top--;
}
void Print(struct Stack&s)
{
int i;
if (s.top==-1)
{
cout<<"无数据可打印!"<>str;
if (str=='A')
{
y=new struct hash[LEN];
cin>>y->key;
insert(Hash,s,y);
}
if (str=='B')
{
cin>>k;
Delete(Hash,s,k);
}
if (str=='C')
{
cin>>k;
search(Hash,s,k);
}
if (str=='D')
{
Print(s);
}
if (str=='E')
{
break;
}
}
}
11.2散列表
多个关键字映射到同一个数组下标位置称为碰撞。
好的散列函数应使每个关键字都等可能地散列到m个槽位中。
链接法散列一次查找时间为O(1+a) a=n/m.删除和插入的时间在下面练习中。
11.2-1假设用一个散列函数h将n个不同的关键字散列到一个长度为m的数组T中。假设采用的是简单均匀散列,那么期望的冲突数是多少?更准确地,集合{{k,l}:k≠l,且h(k)=h(l)}基的期望值是多少?
书中已经给出分析:E[X(kl)]=1/m
那么总的期望应该是E[∑∑E[X(kl)]]=∑∑1/m=n(n-1)/2m
11.2-2 对于一个用链接法解决冲突的散列表,说明将关键字5,28,19,15,20,33,12,17,10,插入到该表中的过程。设该表中有9个槽位,并设其散列函数为h(k)=k mod 9.
//11.2-2
#include
using namespace std;
#define MAX 10 //槽的个数
#define LEN sizeof(struct list)
struct list*head=NULL;
struct list
{
int key;
struct list*next;
struct list*prev;
}slot[MAX];
int hash(int y)
{
int i=y%(MAX-1);
return i;
}
void Init(struct list *slot[])//初始化结构体数组
{
for (int i=0;ikey=a[j];
int i=hash(x->key);
x->next=slot[i];
if (slot[i]!=NULL)
{
slot[i]->prev=x;
}
slot[i]=x;
x->prev=NULL;
return slot[i];
}
void Print(struct list *slot[])
{
int i=0;
while (i!=MAX)
{
cout<<"第"<key;
slot[i]=slot[i]->next;
if (slot[i])
{
cout<<"->";
}
}
cout< 
11.2-3 Marley教授做了这样一个假设,即如果将链模式改动一下,使得每个链表都能保持已排好序的顺序,散列的性能就可以有较大的提高。 Marley教授的改动对成功查找,不成功查找,插入和删除操作的运行时间有何影响?
对于一个总共有n个元素,m个槽的散列表来说,平均存储元素数为a=n/m。设Marley教授方法的所有排列都是非降序的。
查找操作:普通链接模式:由于插入时是无序的,所以查找时,成功的查找需要O(1+a1)时间(a1 有序链接模式:由于插入时是有序的,所以一次成功的查找时,一次成功查找平均需要O(1+a/2)时间。一次不成功的查找,平均时间也是O(1+a/2)。因为在查找过程中,都仅仅需要找到第一个大于等于k的元素为止,不需要遍历整个链表。假设链表中有序元素从1,2,....a依次排列,那么查找链表k元素平均时间就是O((1+a)/2)=O(a/2).所以总的时间为O(1+a/2)。所以查找时间减半了。
插入操作:普通链接模式:由于插入是不按照顺序的。所以只需要在表头插入即可。需要时间为O(1).
有序链接模式:由于插入是需要按照顺序的。所以要先找到插入位置。那么需要时间为O(1+a/2)。因为首先找到小于k的结点A,并且A的下一个结点大于k,然后插入到A的后面。所以插入操作的时间增加了。
删除操作:普通链接模式:利用双向链表仅用O(1)时间删除。但是删除前做一个元素是否存在的判断,那么就需要调用查找函数了。这样就需要O(1+a)时间了。
有序链接模式:利用双向链表仅用O(1)时间删除。如果同上一样要做判断,那么总时间就是O(1+a/2).所以删除操作时间减半了。
总结:查找与删除操作时间减半,插入操作时间增加了。
查找操作:普通链接模式:由于插入时是无序的,所以查找时,成功的查找需要O(1+a1)时间(a1
插入操作:普通链接模式:由于插入是不按照顺序的。所以只需要在表头插入即可。需要时间为O(1).
有序链接模式:由于插入是需要按照顺序的。所以要先找到插入位置。那么需要时间为O(1+a/2)。因为首先找到小于k的结点A,并且A的下一个结点大于k,然后插入到A的后面。所以插入操作的时间增加了。
删除操作:普通链接模式:利用双向链表仅用O(1)时间删除。但是删除前做一个元素是否存在的判断,那么就需要调用查找函数了。这样就需要O(1+a)时间了。
有序链接模式:利用双向链表仅用O(1)时间删除。如果同上一样要做判断,那么总时间就是O(1+a/2).所以删除操作时间减半了。
总结:查找与删除操作时间减半,插入操作时间增加了。
11.2-4 说明在散列表内部,如何通过将所有未占用的槽位链接成一个自由链表,来分配和释放元素所占的存储空间。假定一个槽位可以存储一个标志,一个元素加上一个或两个指针。所有的字典和自由链表操作均应具有O(1)的期望运行时间。该自由链表需要是双向链表吗?或者,是不是单链表就足够了呢?
首先初始化一个自由表,该表能容纳散列表所有元素。然后和第十章链表的释放和分配内存类似,只不过由于要解决碰撞问题,散列需要一个指针数组来表示。对于这个自由链表需要用双向链表来提高插入,删除操作速度。
代码如下:
//11.2-4 有自由表的散列表,自由表用来分配和释放内存的。
#include
using namespace std;
#define MAX 13 //槽的个数m
#define max 100 //整个散列表的元素个数n
#define LEN sizeof(struct list)
struct list*Free=NULL;
struct list * Allocate_object(struct list *x);//数组next为自由数组表
void free_object(struct list *x);
struct list
{
int key;
int flag;
struct list*next;
struct list*prev;
};
int hash(int y)
{
return y%MAX;
}
void Init(struct list *slot[])
{
struct list *p,*p1;
for (int i=0;iflag=0;//0表示该结点无数据
if (Free==NULL)
{
p1=Free=p;
}
else
{
p1->next=p;
p->prev=p1;
p1=p;
}
}
p->next=NULL;
}
//查找数据
struct list*search(struct list *slot[],int k)
{//O(1+n/m)
int i=hash(k);//O(1)
struct list*x;
x=slot[i];
while (x!=NULL&&x->key!=k)//O(n/m) 如果散列表中槽和表中元素数成正比,有n=O(m)。那么运行时间就为O(1)。
{
x=x->next;
}
return x;
}
//插入数据
struct list*insert(struct list *slot[],struct list*x)
{
x=Allocate_object(x);
if (!x)
{
return NULL;
}
x->flag=1;//1表示有数据
x->key=rand()%max;
int i=hash(x->key);
x->next=slot[i];
if (slot[i]!=NULL)
{
slot[i]->prev=x;
}
slot[i]=x;
x->prev=NULL;
return slot[i];
}
//删除数据
struct list*Delete(struct list *slot[],int k)
{
int i=hash(k);
struct list *x=search(slot, k);
if (!x)
{
cout<<"待删除数据不存在!"<prev!=NULL)
{
x->prev->next=x->next;
}
else
{
slot[i]=x->next;
}
if (x->next!=NULL)
{
x->next->prev=x->prev;
}
free_object(x);
cout<<"删除成功!"<next;
return x;
}
}
//释放空间
void free_object(struct list *x)
{
x->flag=0;
x->next=Free;
Free=x;
}
void Print(struct list *slot[])
{
int i=0;
while (i!=MAX)
{
cout<<"第"<key;
p=p->next;
if (p)
{
cout<<"->";
}
}
cout<
11.2-5假设将一个具有n个关键字的集合存储到一个大小为m的散列表中。试说明如果这些关键字均源于全域U,且|U|>mn,则U中还有一个大小为n的子集,其由散列到同一槽位中的所有关键字构成,使得链接法散列的查找时间最坏情况下位θ(n).
对于全域|U|>mn映射到m个槽中,若想U>mn,那么至少有一个槽位中的关键字大于n,其查找最坏时间为O(n)
11.2-6假设将n个关键字存储到一个大小为m且通过链接法解决冲突的散列表中,同时已知每条链的长度,包括其中最长链的长度L,请描述从散列表的所有关键字中均匀随机地选择某一元素并在O(L(1+1/a))的期望时间内返回该关键字的过程。
如果整个哈希表有m行L列,每一行存储一条链。该数组有mL个位置存储这n个元素,并且有mL-n个空值。该程序随机选择数组中任意关键字,直到找到一个关键字并返回。成功的选择一个关键字的概率为n/mL,所以根据伯努利的几何分布知,需要经过mL/n=L/a次选择才能成功找到一个关键字。每次选择需要的时间是O(1),所以成功选择一个关键字需要O(L/a),由于各链表的长度是已知的。这个最长链表L找到期望元素需要O(L)时间,所以从选择元素到找到元素需要O(L(1+1/a)).
11.3散列函数
(1)除法散列法:h(k) = k mod m
(2)乘法散列法:h(k) = m * (k * A mod 1) (0
(3)全域散列:从一组散列函数中随机地选择一个,这样平均情况运行时间比较好。
11.3-1 假设我们希望查找一个长度为n的链表,其中每一个元素都包含一个关键字k并具有散列值h(k).每一个关键字都是长字符串。那么在表中查找具有给定关键字的元素时,如何利用各元素的散列值呢?
通过k的散列值h(k)对应的链表找到k.
11.3-2假设将一个长度为r的字符串散列到m个槽中,并将其视为一个以128为基数的数,要求应用除法散列法。我们可以很容易地把数m表示为一个32位的机器字,但对长度为r的字符串,由于它被当做以128为基数的数来处理,就要占用若干个机器字。假设应用散列法计算一个字符串的散列值,那么如何才能在除了该串本身占用的空间外,只利用常数个机器字。
对于每个字母分别取模然后求∑在取模 这一过程利用了模运算的性质,(a+b)%m=(a%m+b%m)%m
11.3-3考虑除法散列法的另一种,其中h(k)=k mod m,m=2^p-1,k为按基数2^p表示字符串。试证明,如果串x可由串y通过其自身的字符置换排列导出,则x和y具有相同的散列值。给出一个应用的例子,其中这一特性在散列函数中是不希望出现的。


比如录入英语单词时,mary是人名,而army是军队,两个单词如果都被用这种方式散列到同一个槽中,那么就会出现歧义。
11.3-4 考虑一个大小为m=1000的散列表和一个对应的散列函数h(k)=m(kAmod1),其中A=(√5-1)/2,试计算关键字61,62,63,64和65被映射到位置。
#include
#include
using namespace std;
const double A=(sqrt(5)-1)/2.0;
int hash(int k,int m)
{
double x=(A*k-(int)(A*k))*m;
return x;
}
void main()
{
int k;
while (cin>>k)
{
cout<<"Hash["< 
11.3-5定义一个从有限集合U到有限集合B上的散列函数簇H为ε全域的。如果对U中所有的不同元素对k和l,都有 Pr{h(k)=h(l)}≤ε,其中概率是相对从函数簇H中随机抽取的散列函数h而言的。试证明:一个ε全域的散列函数簇必定满足:ε≥1/|B|-1/|U|
设b为|B|的槽个数,u为全域|U|的元素个数。
第j个槽中的元素数uj,其中发生冲突的元素对数为C(uj,2)=uj(uj-1)/2
第j个槽中最少有uj=u/b个元素在同一槽中。(《教师手册》里面有证明,这里略过)
所以总的冲突对数至少为∑uj(uj-1)/2=b(u/b)(u/b-1)/2。。。。(1)
而集合U中的元素对数总数是u(u-1)/2.....(2)
所以冲突对数概率ε≥(1)/(2)=(u/b-1)/(u-1)>(u/b-1)/u=1/b-1/u
所以一个ε全域的散列函数簇必定满足:ε≥1/b-1/u=1/|B|-1/|U|
11.3-6 设U为由取自Zp中的值构成的n元组集合,并设B=Zp,其中p为质数。当输入为一个取自U的输入n元组时,定义其上的散列函数hb:U→B(b∈Zp)为: hb() = ∑(j=0~n-1, aj*b^j) 并且,设ℋ={hb:b∈Zp}.根据练习11.3-5中 ε全域的定义,证明 ℋ是((n-1)/p)全域的。(提示:见练习31.4-4)
对于集合U上的两个互异的n元组 k= ϵ U, l= ϵ U, 其中ki != li, b ϵ Zp.U散列到B上发生碰撞的概率: Pr{hb(k) = hb(l)}= Pr{hb(k) – hb(l) = 0}= Pr{∑(j=0~n-1, (kj-lj)*b^j) = 0}.其中 ∑(j=0~n-1, (kj-lj)*b^j) = 0)是一个 n-1次的多项式方程,这个方程在Zp上的解b有至多n-1个根。所以Pr{∑(j=0~n-1, (kj-lj)*b^j) = 0} <= (n-1)/p, b ϵ Zp.Pr{hb(k) = hb(l)} <= (n-1)/p, b ϵ Zp. ℋ 是((n – 1)/p)全域的。得证!参考资料: Rip's Infernal Majesty的博客
11.4开放寻址法
三种探查技术来计算探查序列:1)线性探查:h(k,i)=(h'(k)+i)mod m i=0,1,1...,m-1
2)二次探查:h(k,i)=(h'(k)+c1i+c2i²) mod m i同上
3)双重探查:h(k,i)=(h1(k)+ih2(k))mod m i同上
开放寻址散列的分析:定理11.6 给定一个装载因子a=n/m<1的开放寻址散列表,在一次不成功的查找中,期望的探查数之多为1/(1-a).假设散列是均匀的。
推论11.7 平均情况,项一个装载因子为a的开放寻址散列表中插入一个元素时,至多需要做1/(1-a)次探查。假设采用的是均匀散列。
定理11.8 给定一个装载因子为a<1的开放寻址散列表,一次成功查找中的期望探查数之多为(1/a)ln(1/(1-a)).
在开放寻址法中,删除操作比较困难,但也有解决办法,不过在必须删除关键字的应用中,往往采用链接法解决碰撞。
以下是11.3-11.4节代码:
//除法,乘法,全域散列。与 线性,二次,双重探查。
#include
#include
#include
using namespace std;
#define Null -1
#define DELETED -2
//除法散列
int hash_div1(int k,int m)//选m的值常常是不接近2的幂的质数。
{
return k%m;
}
//除法散列
int hash_div2(int k,int m)//选m的值常常是不接近2的幂的质数。
{
return k%m;
}
//乘法散列
int hash_mul(int k)
{
double A=(sqrt(5)-1)/2.0;
int m=100;//对于m没有特别要求。m一般选择为2的某个幂。
return (A*k-(int)(A*k))*m;
}
//全域散列 P为质数
int hash_Universal(int k,int p)
{
static int a=0,b=0,flag=0;
int m=6;//m不一定非是质数。
if (flag==0)
{
a=rand()%(p-1)+1;
b=rand()%p;
flag=1;
}
return ((a*k+b)%p)%m;
}
//线性探查
int LineProbe(int k,int m,int i)
{
return (hash_div1(k,m)+i)%m; //选m的值常常是不接近2的幂的质数。
}
//二次探查
int QuadraticProbing(int k,int m,int i)
{
int c1=1,c2=3;
return (hash_div1(k,m)+c1*i+c2*i*i)%m; //其中常数c1,c2,m的值的选择是受限制的
}
//双重探查
int DoublefunProbing(int k,int m,int i)
{
return (hash_div1(k,m)+i*(1+hash_div2(k,m-1)))%m; //其中m为质数,还可以选择m为2的幂,并设置一个总产生奇数的hash_div2
}
int hash_insert1(int T[],int m,int k)
{
int i=0;
do
{
int j=LineProbe(k,m,i);//这里可以替换成二次,双重探查。插入,查找,删除函数同时被替换
if (T[j]==Null||T[j]==DELETED)
{
T[j]=k;
return j;
}
else i++;
} while (i!=m);
cerr<<"hash table overflow"<
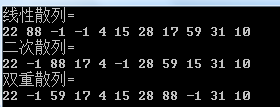
11.4-1 考虑将关键字10,22,31,4,15,28,17,88,59用开放寻址法插入到一个长度为m=11的散列表中,主散列函数为h'(k)=k mod m.说明用线性探查,二次探查(c1=1,c2=3)以及双重散列h2(k)=1+(k mod (m-1))将这些关键字插入散列表的结果。
用11.3-11.4节代码可得:
11.4-2请写出HASH-DELETE的伪代码;修改HASH-INSERT,使之能处理特殊值DELETED。
见11.3-11.4节代码。
11.4-3 假设采用双重散列来解决碰撞;亦即,所用的散列函数为h(k,i)=(h1(k)+h2(k))mod m.证明:如果对某个关键字k,m和h2(k)有最大公约数d≥1,则在对关键字k的一次不成功的查找中,在回到槽h1(k)之前,要检查散列表的1/d.于是,当d=1时,m与h2(k)互质,查找操作可能要检查整个散列表。(提示:见第31章)
设经过s次查找后,回到槽h1(k)。那么就有(h1(k)+sh2(k))mod m=h1(k)mod m 。此时sh2(k)是m的倍数=> m|sh2(k) 由于gcd(m,h2(k))=d => (m/d) | s(h2(k)/d) 由于gcd(m/d,h2(k)/d)=1 => m/d | s =>s≥m/d=>所以在回到槽h1(k)之前,必检查散列表总元素数的1/d.(更具体地讲应该是至少1/d个) 。当d=1时,1/d=1,所以可能要检查整个散列表。
11.4-4考虑一个采用了均匀散列的开放寻址散列表。给出当装载因子为3/4和7/8时,在一次不成功查找中期望探查数的上界,以及一次成功查找中期望探查数的上界。
不成功的探查上界为1/(1-a): 1/(1-3/4)=4次 1/(1-7/8)=8次 成功的探查上界为(1/a)ln(1/(1-a)): 1/(3/4)ln(1/(1-3/4))=1.848次 1/(7/8)ln(1/(1-7/8))=2.377次
11.4-5 考虑一个装载因子为a的开放寻址散列表。找出一个非0的值a,使得在一次不成功的查找中,期望的探查数等于成功查找中期望探查数的两倍。此处的两个期望探查数上界可以根据定理11.6和定理11.8得到。
不成功探查:1/(1-a) 成功探查:(1/a)ln(1/(1-a)) 1/(1-a)=2(1/a)ln(1/(1-a)) 关于a的解为:a≈0.715
11.5完全散列
定义:在使用链接法的1级散列产生冲突后,在每个冲突的槽再次用较小的2级散列,经过随机多次的2级散列筛选后,从而达到2级散列表不发生冲突的目的。
11.5-1 假设要将n个关键字插入到一个大小为m,采用了开放寻址法和均匀散列基数的散列表中。设p(n,m)为没有碰撞发生的概率。证明:p(n,m)≤e^[-n(n-1)/2m].(提示:见公式3.11)论证当n超过√m时,不发生碰撞的概率迅速趋于0.
对于这n个关键字,有C(n,2)对关键字可能发生碰撞,而每一对关键字对于m个槽发生碰撞的概率是1/m。所以对于n个关键字总共有C(n,2)/m概率发生碰撞,那么p(n,m)=1-C(n,2)/m=1-n(n-1)/2m≤e^[-n(n-1)/2m].(根据1+x≤e^x).后面那个问题不清楚,网上也没有相关答案。
11-1最长探查的界
用一个大小为m的散列表来存储n个数据项目,并且有n≤m/2。采用开放寻址法来解决碰撞问题。
a)假设采用了均匀散列,证明对于i=1,2,....n,第i次插入需要严格多于k次探查的概率至多为2^(-k).
p(x>k)=p(x≥k+1)=(n/m)((n-1)/(m-1)).....(n-k+1)/(m-k+1)≤(n/m)^k≤2^(-k) 利用的是定理11.5分析方法。
b) 证明:对于i=1,2...n,第i次插入需要多于2lgn次探查的概率至多是1/n^2.
当k=2lgn时,带入a式便得到p(x>2lgn)≤1/n^2
设随机变量Xi表示第i次插入所需的探查数。在上面b中已经证明Pr{Xi>2lgn}≤1/n^2.设随机变量X=maxXi表示n次插入中所需探查数的最大值。
c)证明:Pr{X>2lgn}≤1/n
设事件Xi发生的概率为P{Ai},那么事件X1或事件X2或。。。。时间Xn发生的概率为P{X1∪X2...∪Xn}≤P{X1}+P{X2}+......P{Xn}
由于事件X为探查数最大值,所以事件Xi中成为事件X=X1∪X2...∪Xn,根据b式有P{Xi}≤1/n^2,所以P{X1∪X2...∪Xn}≤n*(1/n^2)=1/n
d)证明:最长探查序列的期望长度为E[x]=O(lgn)
根据期望的定义:E[x]=∑(k=1~n)kPr{X=k}
=∑(k=1~2lgn)kPr{X=k}+∑(k=2lgn+1,n)kPr{X=k}
=∑(k≤2lgn)kPr{X=k}+∑(k≥2lgn+1)kPr{X=k}
≤∑2lgnPr{X=k}+∑nPr{X=k}
=2lgnPr{X≤2lgn}+nPr{X>2lgn} 其中Pr{X≤2lgn}≤1,根据b式Pr{X>2lgn}≤1/n^2 E[x]≤2lgn*1+n*(1/n^2)≤2lgn*1+n*(1/n)=O(lgn) d式参照《教师手册》
11-2 链接法中槽大小的界
假设有一个含n个槽的散列表,并用链接法来解决碰撞问题。另假设向表中插入n个关键字。每个关键字被等可能地散列到每个槽中。设在所有关键字被插入后,M是各槽中所含关键字数的最大值。读者的任务是证明M的期望值E[M]的一个上界为O(lgn/lglgn).
a)论证k个关键字被散列到某一特定槽中的概率Qk为:Qk=(1/n)^k(1-1/n)^(n-k)C(n,k)
这个概率可以抽象成:有C(n,k)种方法选出n次试验中哪k次成功。被散列到特定槽X0视为成功,其成功率是1/n,相反则视为失败概率为1-1/n. 那么根据伯努利的二项分布就是a的答案。
b)设Pk为M=k的概率,也就是包含最多关键字的槽中k个关键字的概率。证明:Pk≤nQk.
同思考题11-1c式被散列到槽中最多的关键字数视为一个事件X=X1∪X2∪....∪Xn,其中Xi为被散列到槽i的事件。所以根据布尔不等式Pr{X}≤Pr{X1}+Pr{X2}+....+Pr{Xn}=nQk
c)应用斯特林近似公式,证明Qk
Qk=(1/n)^k(1-1/n)^(n-k)C(n,k)
<1/k! (根据n!/(n-k)!
(k/e)^k)
d) 没看懂《教师手册》证明!
e)论证:E[M]≤Pr{M>clgn/lglgn}*n+Pr{M≤clgn/lglgn}*clgn/lglgn并总结:E[M]=O(lgn/lglgn)
这个和思考题11-1d证明完全一样,方法往上看11-1d。
11-3 二次探查
假设要在一个散列表(表中的各个位置为0,1.。。m-1)中查找关键字k,并假设有一个散列函数h将关键字空间映射到集合{0,1,...,m-1}上,查找方法如下:
1) 计算值i←h(k),置j←0。
2)探查位置i,如果找到了所需的关键字k,或如果这个位置是空的,则结束查找。
3)置j←(j+1)mod m,i←(i+j) mod m,返回步2).
设m是2的幂。
a)通过给出等式(11.5)中c1和c2的适当值,来证明这个方案是一般的“二次探查”法的一个实例。
由j=0~m-1得每次循环j就自加1,于是有j=1~m, 初始时,i=h(k),所以第j次循环i=h(k)+1+2..+j=h(k)+j²/2+j/2. 其中当c1=1/2, c2=1/2.
b)证明:在最坏情况下,这个算法要检查表中的每一个位置。
哎~ 这个比较坑爹!因为涉及了数论知识。不懂数论的可以略过了。
在这个算法中,从j=0到m循环中,假设有第i次循环与第j次循环所得散列值h(k,i)=h(k,j)的情况( 且0(j²/2+j/2-i²/2-i/2)≡0(mod m) <=>(j-i)(j+i+1)/2≡0(mod m) <=>(j-i)(j+i+1)/2=mk <=>由于m为2的幂。所以设m=2^t. (j-i)(j+i+1)=k*2^(t+1).........①
现在论证j-i与j+i+1若一个为奇数,则另一个必为偶数....② 若i=2k1,j=2k2,则j-i=2(k2-k1)为偶数,i+j+1=2(k1+k2)+1为奇数,类似地:i与j都为奇数或i与j一奇一偶都可以证明②式。
现在假设j-i为奇数,那么j+i+1为偶数,gcd(2^(t+1),j-i)=1.由①式知:2^(t+1) | (j-i)(j+i+1) 所以根据推论31.5:2^(t+1) | (j+i+1).由于j+i+1≤m-1+m-2+1=2(m-1)<2m=2^(t+1) 所以2^(t+1) 不能整除(j+i+1),同理j-i为偶数与j+i+1为奇数时,2^(t+1) 不能整除(j-i).所以①式不成立。所以h(k,i)≠h(k,j),在循环0~m中,任意i与j的hash值都不相等,那么这m次循环得到的hash值各不相等,所以共有m个不同的hash值对应表中m个关键字,覆盖了整个散列表。
11-4 题目没读懂,不知从何下手!