数据结构与算法之美笔记 : 最短路径
像 Google 地图、百度地图、高德地图这样的地图软件,我想你应该经常使用吧?如果想从家开车到公司,你只需要输入起始、结束地址,地图就会给你规划一条最优出行路线。这里的最优,有很多种定义,比如最短路线、最少用时路线、最少红绿灯路线等等。作为一名软件开发工程师,你是否思考过,地图软件的最优路线是如何计算出来的吗?底层依赖了什么算法呢?
解决软件开发中的实际问题,最重要的一点就是建模,也就是将复杂的场景抽象成具体的数据结构。
针对这个问题,我们该如何抽象成数据结构呢?
我们之前也提到过,图这种数据结构的表达能力很强,显然,把地图抽象成图最合适不过了。我们把每个岔路口看作一个顶点,岔路口与岔路口之间的路看作一条边,路的长度就是边的权重。如果路是单行道,我们就在两个顶点之间画一条有向边;如果路是双行道,我们就在两个顶点之间画两条方向不同的边。这样,整个地图就被抽象成一个有向有权图。
具体的代码实现,我放在下面了。于是,我们要求解的问题就转化为,在一个有向有权图中,求两个顶点间的最短路径。
public class Graph { // 有向有权图的邻接表表示
private LinkedList adj[]; // 邻接表
private int v; // 顶点个数
public Graph(int v) {
this.v = v;
this.adj = new LinkedList[v];
for (int i = 0; i < v; ++i) {
this.adj[i] = new LinkedList<>();
}
}
public void addEdge(int s, int t, int w) { // 添加一条边
this.adj[s].add(new Edge(s, t, w));
}
private class Edge {
public int sid; // 边的起始顶点编号
public int tid; // 边的终止顶点编号
public int w; // 权重
public Edge(int sid, int tid, int w) {
this.sid = sid;
this.tid = tid;
this.w = w;
}
}
// 下面这个类是为了 dijkstra 实现用的
private class Vertex {
public int id; // 顶点编号 ID
public int dist; // 从起始顶点到这个顶点的距离
public Vertex(int id, int dist) {
this.id = id;
this.dist = dist;
}
}
}
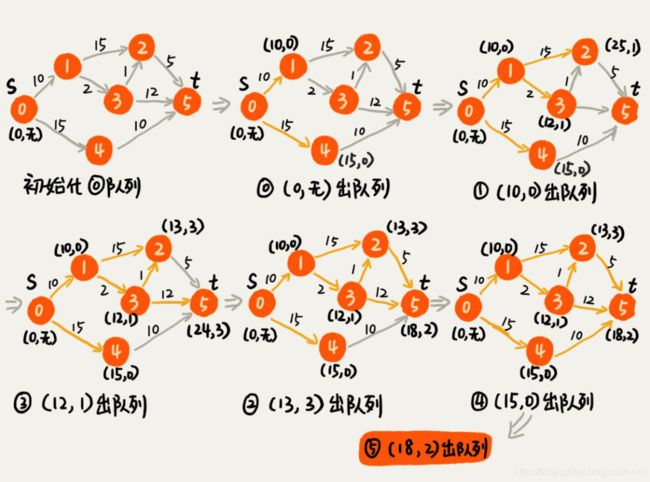
想要解决这个问题,有一个非常经典的算法,最短路径算法,更加准确地说,是单源最短路径算法(一个顶点到一个顶点)。提到最短路径算法,最出名的莫过于 Dijkstra 算法了。所以,我们现在来看,Dijkstra 算法是怎么工作的。
// 因为 Java 提供的优先级队列,没有暴露更新数据的接口,所以我们需要重新实现一个
private class PriorityQueue { // 根据 vertex.dist 构建小顶堆
private Vertex[] nodes;
private int count;
public PriorityQueue(int v) {
this.nodes = new Vertex[v+1];
this.count = v;
}
public Vertex poll() { // TODO: 留给读者实现... }
public void add(Vertex vertex) { // TODO: 留给读者实现...}
// 更新结点的值,并且从下往上堆化,重新符合堆的定义。时间复杂度 O(logn)。
public void update(Vertex vertex) { // TODO: 留给读者实现...}
public boolean isEmpty() { // TODO: 留给读者实现...}
}
public void dijkstra(int s, int t) { // 从顶点 s 到顶点 t 的最短路径
int[] predecessor = new int[this.v]; // 用来还原最短路径
Vertex[] vertexes = new Vertex[this.v];
for (int i = 0; i < this.v; ++i) {
vertexes[i] = new Vertex(i, Integer.MAX_VALUE);
}
PriorityQueue queue = new PriorityQueue(this.v);// 小顶堆
boolean[] inqueue = new boolean[this.v]; // 标记是否进入过队列
vertexes[s].dist = 0;
queue.add(vertexes[s]);
inqueue[s] = true;
while (!queue.isEmpty()) {
Vertex minVertex= queue.poll(); // 取堆顶元素并删除
if (minVertex.id == t) break; // 最短路径产生了
for (int i = 0; i < adj[minVertex.id].size(); ++i) {
Edge e = adj[minVertex.id].get(i); // 取出一条 minVetex 相连的边
Vertex nextVertex = vertexes[e.tid]; // minVertex-->nextVertex
if (minVertex.dist + e.w < nextVertex.dist) { // 更新 next 的 dist
nextVertex.dist = minVertex.dist + e.w;
predecessor[nextVertex.id] = minVertex.id;
if (inqueue[nextVertex.id] == true) {
queue.update(nextVertex); // 更新队列中的 dist 值
} else {
queue.add(nextVertex);
inqueue[nextVertex.id] = true;
}
}
}
}
// 输出最短路径
System.out.print(s);
print(s, t, predecessor);
}
private void print(int s, int t, int[] predecessor) {
if (s == t) return;
print(s, predecessor[t], predecessor);
System.out.print("->" + t);
}
我们用 vertexes 数组,记录从起始顶点到每个顶点的距离(dist)。起初,我们把所有顶点的 dist 都初始化为无穷大(也就是代码中的 Integer.MAX_VALUE)。我们把起始顶点的 dist 值初始化为 0,然后将其放到优先级队列中。
我们从优先级队列中取出 dist 最小的顶点 minVertex,然后考察这个顶点可达的所有顶点(代码中的 nextVertex)。如果 minVertex 的 dist 值加上 minVertex 与 nextVertex 之间边的权重 w 小于 nextVertex 当前的 dist 值,也就是说,存在另一条更短的路径,它经过 minVertex 到达 nextVertex。那我们就把 nextVertex 的 dist 更新为 minVertex 的 dist 值加上 w。然后,我们把 nextVertex 加入到优先级队列中。重复这个过程,直到找到终止顶点 t 或者队列为空。
以上就是 Dijkstra 算法的核心逻辑。除此之外,代码中还有两个额外的变量,predecessor 数组和 inqueue 数组。
predecessor 数组的作用是为了还原最短路径,它记录每个顶点的前驱顶点。最后,我们通过递归的方式,将这个路径打印出来。打印路径的 print 递归代码我就不详细讲了,这个跟我们在图的搜索中讲的打印路径方法一样。如果不理解的话,你可以回过头去看下那一节。
inqueue 数组是为了避免将一个顶点多次添加到优先级队列中。我们更新了某个顶点的 dist 值之后,如果这个顶点已经在优先级队列中了,就不要再将它重复添加进去了。
Dijkstra 算法的时间复杂度是多少?
在刚刚的代码实现中,最复杂就是 while 循环嵌套 for 循环那部分代码了。while 循环最多会执行 V 次(V 表示顶点的个数),而内部的 for 循环的执行次数不确定,跟每个顶点的相邻边的个数有关,我们分别记作 E0,E1,E2,……,E(V-1)。如果我们把这 V 个顶点的边都加起来,最大也不会超过图中所有边的个数 E(E 表示边的个数)。
for 循环内部的代码涉及从优先级队列取数据、往优先级队列中添加数据、更新优先级队列中的数据,这样三个主要的操作。我们知道,优先级队列是用堆来实现的,堆中的这几个操作,时间复杂度都是 O(logV)(堆中的元素个数不会超过顶点的个数 V)。
所以,综合这两部分,再利用乘法原则,整个代码的时间复杂度就是 O(E*logV)。
弄懂了 Dijkstra 算法,我们再来回答之前的问题,如何计算最优出行路线?
虽然地图很大,但是两点之间的最短路径或者说较好的出行路径,并不会很“发散”,只会出现在两点之间和两点附近的区块内。所以我们可以在整个大地图上,划出一个小的区块,这个小区块恰好可以覆盖住两个点,但又不会很大。我们只需要在这个小区块内部运行 Dijkstra 算法,这样就可以避免遍历整个大图,也就大大提高了执行效率。
对于这样两点之间距离较远的路线规划,从北京海淀区某个地点,到上海黄浦区某个地点,我们可以把北京海淀区或者北京看作一个顶点,把上海黄浦区或者上海看作一个顶点,先规划大的出行路线。比如,如何从北京到上海,必须要经过某几个顶点,或者某几条干道,然后再细化每个阶段的小路线。
我们再来看另外两个问题,最少时间和最少红绿灯。
前面讲最短路径的时候,每条边的权重是路的长度。在计算最少时间的时候,算法还是不变,我们只需要把边的权重,从路的长度变成经过这段路所需要的时间。不过,这个时间会根据拥堵情况时刻变化。如何计算车通过一段路的时间呢?这是一个蛮有意思的问题,你可以自己思考下。
每经过一条边,就要经过一个红绿灯。关于最少红绿灯的出行方案,实际上,我们只需要把每条边的权值改为 1 即可,算法还是不变,可以继续使用前面讲的 Dijkstra 算法。不过,边的权值为 1,也就相当于无权图了,我们还可以使用之前讲过的广度优先搜索算法。因为我们前面讲过,广度优先搜索算法计算出来的两点之间的路径,就是两点的最短路径。
不过,这里给出的所有方案都非常粗糙,只是为了给你展示,如何结合实际的场景,灵活地应用算法,让算法为我们所用,真实的地图软件的路径规划,要比这个复杂很多。而且,比起 Dijkstra 算法,地图软件用的更多的是类似 A* 的启发式搜索算法,不过也是在 Dijkstra 算法上的优化罢了
来源: 数据结构与算法之美 王争