结构光三维重建系统综述
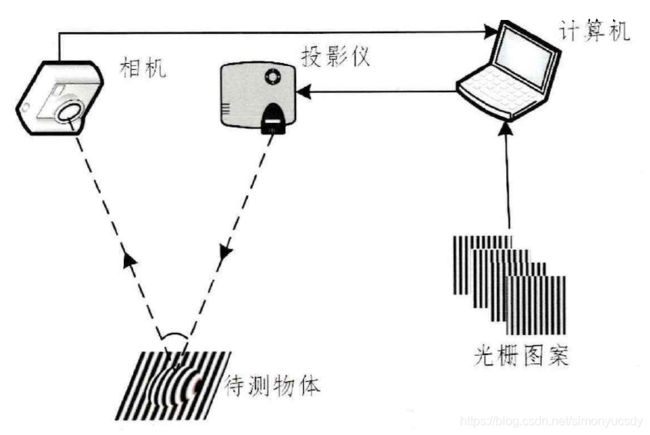
数字光栅投影(Digital Fringe Projector,DFP)三维测量系统主要由相机、投影设备(Projector)和计算机三部分组成,如图所示。首先在计算机端进行结构光图案编码,再由投影设备将编码图案投射到待测物体表面,因物体表面的高度变化将会对投射的条纹图像产生调制,然后由相机获取被调制的条纹图案传输到计算机进行条纹处理,计算出相位的分布,最后由相位和高度的映射关系求出待测物体的表面的高度。
相移法(Phase Shift),是通过对投影的光栅条纹进行一定的相移,然后投射多幅相移图案到有形变物体的表面,最后通过求解相位场的分布得到物体表面的三维深度信息,因其精度高适用于漫反射物体测量,这种方法最为常用。基于相移法的光栅投影三维重建系统,核心的工作包括系统校正、相机标定和解相位等关键技术。

1 数学建模
根据数字光栅投影系统模型组成及原理,建立维测量系统的几何模型如下图,Qw为参考坐标系OXYZ,其中XOY为参考平面,为参考坐标系,为投影仪坐标系。Oc、Op分别为相机(Camera)、投影仪(Projector)的光心,在参考面上的投影为,为待测物体上的任意一点。平面均平行于纸面。
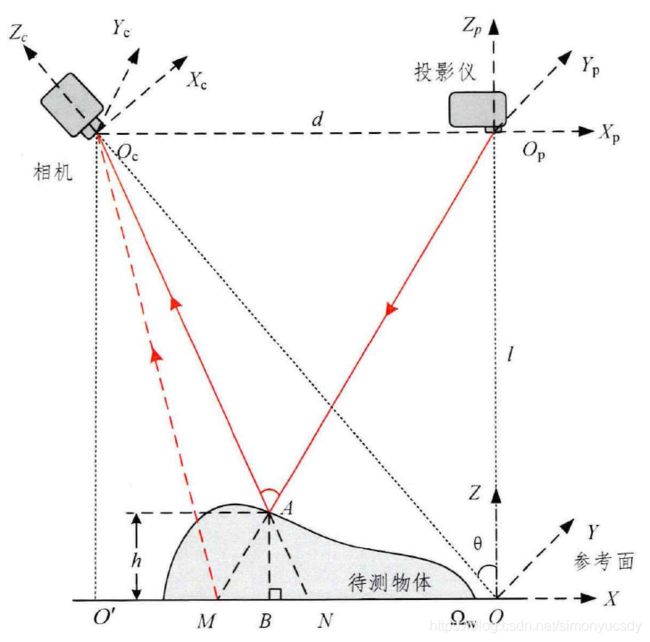
其工作流程如下,假设开始参考平面上没有物体,从投影仪端有一束入射光线OpA投射到点M,此时在相机视野中对应该光线的投射点为参考面的点M,当放置待测物体后,该光线投射到物体表面上的A点,若相机和投影的角度保持不变,此时从相机端获取图片,由于物体高度的变化,在相机视野中对应该光线的原投射点M平移到了点N,点N为反射光线的反向延长线与参考面的交点。由于从点M到点N的位移携带了点A相对于参考平面的高度信息h,即AB的长度,由几何关系我们可以根据位移MN求得高度h。而位移MN的长度又和投影光栅紧密相连,基于此,下面建立高度和相位的映射关系的数学模型。
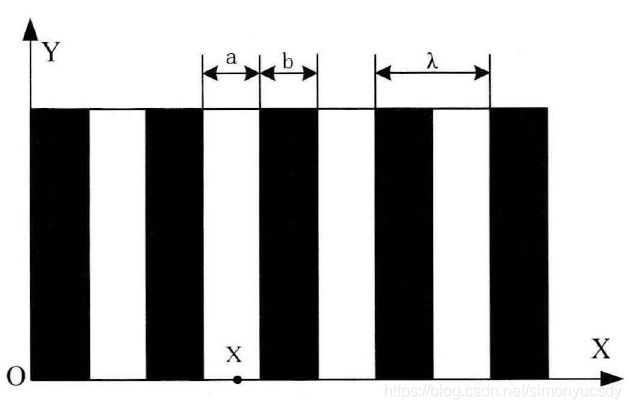
投射光栅条纹的分布如下图,a为线间缝宽,b为栅线宽,A为光栅节距。
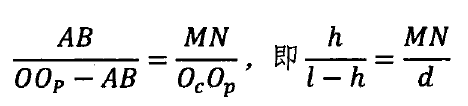
有相似三角形性质可得到:三角形AMN~三角形AOcOp,于是有:

当参投影面和参考平面XOY平行时,投射的光栅相位将沿参考平面X轴方向变化,设平面上任一点相位为 ,根据光栅条纹分布特性可得:
,根据光栅条纹分布特性可得:
![]() 为原点O0的初始相位。
为原点O0的初始相位。

带入到高度的换算公式中:

上式即为数字光栅投影测量法中高度和相位映射关系的核心表达式,![]() 为相位差,其中系统参数
为相位差,其中系统参数 、
、 、
、 可以通过标定得到,而
可以通过标定得到,而![]() 是在参考平面XOY的相位,也可通过标定获得,
是在参考平面XOY的相位,也可通过标定获得,![]() 是在经待测物体调制后的相位,属于待求解量。
是在经待测物体调制后的相位,属于待求解量。
2 相对相位主值求解(求包裹相位)
相移法通过向待测物体投射系列正弦条纹,假设在投影空间中有一点![]() ,那么该点灰度值可用数学表达式表示为:
,那么该点灰度值可用数学表达式表示为:

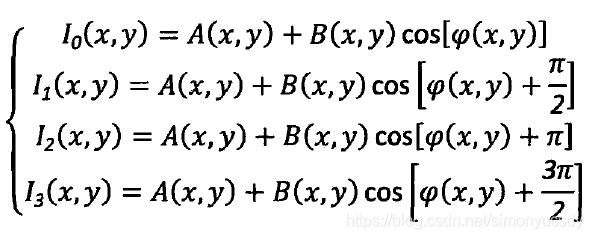
N为相移总步数,n表示第n次相移,n=1,2,3\...,N-1,ap为背景灰度值或直流分量,bp为调制强度或幅度。在条纹投射到待测物体表面之后,由相机端检测到的产生形变的条纹图像函数可表示为:

 为待求相位主值,因此要求解,至少需要三幅图像。由上式可以求得标准N步相移法表达式:
为待求相位主值,因此要求解,至少需要三幅图像。由上式可以求得标准N步相移法表达式:

以四步相移法为例,当N=4时,相位移间隔为 ,则四幅光栅图像的相位移依次是0,,
,则四幅光栅图像的相位移依次是0,, ,
,![]() ,对应的光强依次为:
,对应的光强依次为:

3 解包裹相位
相位解包裹(Phase Unwrapping)求解是DFP三维测量技术中的关键步骤之一,也是研究热点和难点。
在光栅投影阶段采用标准N步相移法,为了恢复相位,这些方法均采用反正切函数逐像素计算相对相位主值,以至于求解的相位的值域在![]() 范围内,在这个阶段获得的相位称为包裹相位(Wrapped Phase),要利用相位和高度的映射关系求解三维坐标,被包裹的相位必须恢复为完整的相位场,称为解包裹或解相位。
范围内,在这个阶段获得的相位称为包裹相位(Wrapped Phase),要利用相位和高度的映射关系求解三维坐标,被包裹的相位必须恢复为完整的相位场,称为解包裹或解相位。
以四步相移法为例,由相移光栅计算得到的相对相位主值(包裹相位)显示如下图,从图中可以看出相对相位主值在不连续的地方相差 ,且这种不连续呈周期分布。
,且这种不连续呈周期分布。
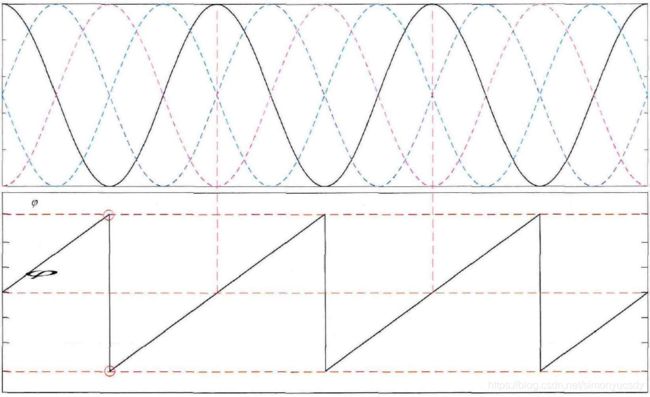
在实际情况中,相位主值除了在单个周期内连续分布外,在沿整个X方向分布也是连续的,我们发现相位突变的地方,相位值加上的整数倍即可得到实际的连续相位值![]() ,其数学表达式如下:
,其数学表达式如下:

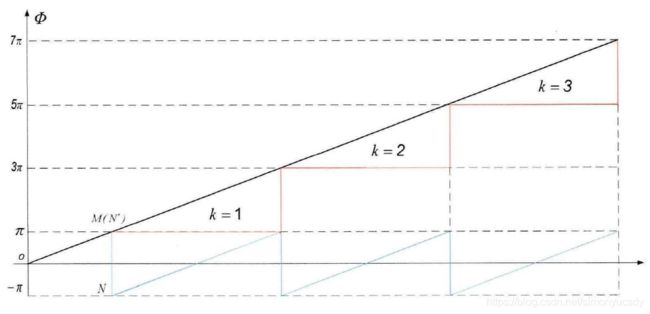
k是观察点的条纹级次。如果条纹图像中每一点处的条纹级次![]() 都有一个预设值且唯一确定,那么求得的连续
都有一个预设值且唯一确定,那么求得的连续![]() 称为绝对相位值(Absolute Phase),相位解包裹的本质也就是求解图像中每一点的条纹级次。
称为绝对相位值(Absolute Phase),相位解包裹的本质也就是求解图像中每一点的条纹级次。
绝对相位值求解过程可得到如下图所示的绝对相位主值图,其函数曲线也由周期间断的锯齿形变为连续上升的直线,且条纹级次的变化依次递增。
4 相位解包裹方法
传统的相位解包裹方法可以分为两类:空间相位展开和时间相位展开。时间相位展开算法源于激光干涉测量法,且只能用于正弦光栅条纹,例如多频相移法。
格雷码法:
多频外差法:
5 误差分析及校正