二值化方法
一、全局阈值法
1.固定阈值方法
该方法是对于输入图像中的所有像素点统一使用同一个固定阈值。其基本思想如下:

其中,T为全局阈值。
缺点:很难为不同的输入图像确定最佳阈值。
2.Otsu算法
Otsu算法又称最大类间方差法
先明确两个概念:
(1)均值
![]()
(2)方差

图像的阈值化处理,就是将图像分为两个部分,高于阈值的部分,和小于阈值的部分。(暂不考虑多阈值的情况)。那么,如果将图像的每一个像素点的强度作为一个数据集合中的单元,那么,阈值化就相当于是一个二分类的问题。
我们假设,大于阈值的类为S1,维度为n1(不考虑秩的问题,实际上就是像素个数),均值为m1;小于阈值的类记为S2,维度为n2,均值为m2。根据前面概率的知识,理想的情况下,对于每一个类,其类内方差应该是很小的。
当然了,考虑每一个类是可行的。但是,我们又可以换个思路,全局上来考虑呢?
假设整个图像的均值为m,我们假设就只有两个数据,m1,m2,考虑着两个数据的离散程度,同样可以用上面的方差公式。这里看起来有点怪怪的,暂且这样来理解吧。也就是说,方差越大,这两个类也就越离散,分的越开。就像吵架一样,吵得声音越大,说明分歧越大,越严重。
所以,我们求这个阈值时,就希望,在内部是很团结的,就是在阈值分割后,两个类中,每一个类都是很和谐的。但是,相互之间又非常的受不了对方,离的越远越好。那么,找到这样的阈值,就十分开心了。
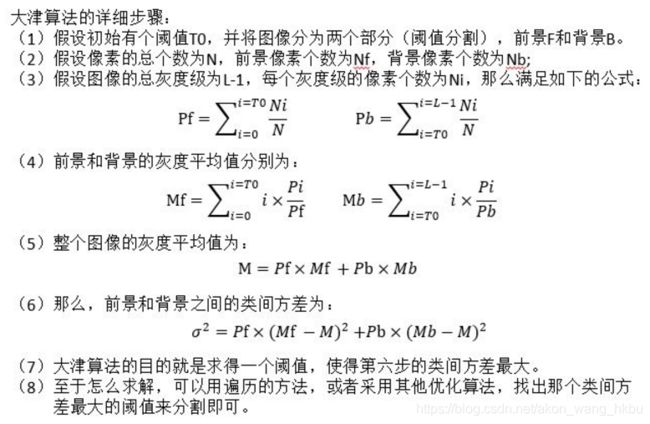
缺点:当目标物体与背景大小比例悬殊或灰度级接近,导致直方图呈现三峰或双峰峰值差距极大时,Otsu算法往往得不到满意的结果
二、局部阈值法
1.自适应阈值算法
自适应阈值算法[2]用到了积分图(Integral Image)的概念,它是一个快速且有效地对网格的矩形子区域计算和的算法。积分图中任意一点 (x, y) 的值是从图左上角到该点形成的矩形区域内所有值之和。图2-5b中的灰色部分为图2-5a中灰色矩阵内值的加和:
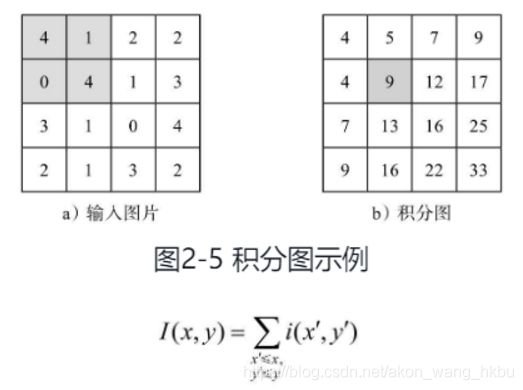
自适应阈值算法的主要思想是以一个像素点为中心设置大小为 s×s 的滑窗,滑窗扫过整张图像,每次扫描均对窗口内的像素求均值并将均值作为局部阈值。若窗口中的某一像素值低于局部阈值t/100,赋值为0;高于局部阈值t/100,赋值为255。因为涉及多次对有重叠的窗口进行加和计算,因此积分图的使用可以有效地降低复杂度和操作次数。为了计算积分图,我们在每个位置存储其左边和上方所有 f(x, y) 值的总和,这一步骤会在线性时间内完成:
I(x, y)= f(x, y)+I(x-1, y)+I(x, y-1)-I(x-1, y-1)
一旦得到积分图,对于任意从左上角 (x1y1, ) 到右下角(x2y2, ) 的矩形内(如图2-6所示)的数值总和均可以使用式(2.2)计算:

流程共扫描全图两次,第一次扫描获得积分图intImg,第二次扫描根据式(2.2)计算每次扫描窗口内像素值的平均值的(100-t)/100,并将计算结果作为局部阈值。若窗口内某一像素点的值乘以窗口大小大于该阈值,则对应输出255,反之则输出0。
2. Niblack算法
Niblack算法同样是根据窗口内的像素值来计算局部阈值的,不同之处在于它不仅考虑到区域内像素点的均值和方差,还考虑到用一个事先设定的修正系数 k 来决定影响程度。
T(x, y)=m(x, y)+ks(x, y)
其中,T(x, y) 为阈值,m(x, y)、s(x, y) 分别代表均值与方差。与 m(x, y) 相近的像素点被判定为背景,反之则判定为前景,而相近的程度则由标准差和修正系数来决定,这样做可以保证算法的灵活性。
缺点:Niblack算法的缺陷一方面在于 r × r 的滑窗会导致在边界区域(r-1)/2的像素范围内无法求取阈值;另一方面在于如果 r×r 滑窗内全部是背景,那么该算法必然会使一部分像素点成为前景,形成伪噪声。因此,r的选择非常关键,若窗口太小,则不能有效地抑制噪声;若窗口太大,则会导致细节丢失。
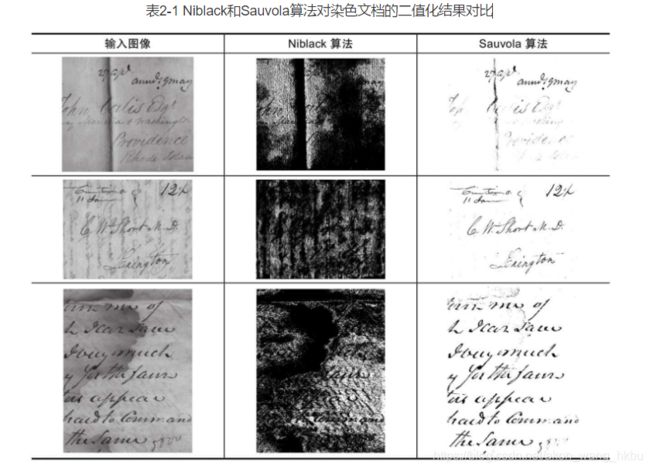
3. Sauvola算法
Sauvola算法是针对文档二值化处理,在Niblack算法基础上的改进:

其中,R是标准方差的动态范围,若当前输入图像是8位灰度图像,则 R=128。Sauvola算法在处理光线不均匀或染色图像时,比Niblack算法拥有更好的表现,因为式(2.3)以自适应的方式放大了标准差s的作用。假设我们要处理一份浅色但有污渍的文档,那么乘以m系数会降低背景区域阈值的范围,这可以有效地减少染色、污渍等带来的影响。表2-1展示了Sauvola与Niblack算法在处理染色文档时的效果差异。
三、其他方法
对于灰度图而言,腐蚀和膨胀运算都类似于卷积操作——将结构元素在原图上平移,而结构元素上的原点就相当于卷积核的核中心。首先我们约定,将结构元素覆盖住的原图区域记为P。
1.腐蚀
如图2-10所示,腐蚀运算即在平移过程中依次计算 P 和 结构元素的差矩阵,并将该矩阵中的最小值赋给原点对应的原图位置.

2.膨胀
如图2-11所示,膨胀运算则是计算 P 和结构元素的和矩阵,并将该矩阵中的最大值赋给原点对应的原图位置。

3.开运算
开运算是先腐蚀后膨胀,开运算可以使图像的轮廓变得光滑,断开狭窄的连接并消除细毛刺
4.闭运算
闭运算是先膨胀后腐蚀.闭运算同样可以平滑轮廓,但其具体作用是排除小型空洞,弥合狭窄的间断点、沟壑以及填补断裂的轮廓线。