OpenCV3学习(6.1)——边缘检测---Canny,Sobel,Prewitt,Robert,Laplace,LOG,DOG算子
图像边缘信息主要集中在高频段,通常说图像锐化或检测边缘,实质就是高频滤波。我们知道微分运算是求信号的变化率,具有加强高频分量的作用。在空域运算中来说,对图像的锐化就是计算微分。由于数字图像的离散信号,微分运算就变成计算差分或梯度。图像处理中有多种边缘检测(梯度)算子,常用的包括普通一阶差分,Robert算子(交叉差分),Sobel算子等等,是基于寻找梯度强度。拉普拉斯算子(二阶差分)是基于过零点检测。通过计算梯度,设置阀值,得到边缘图像。
边缘检测的一般步骤:
- 滤波——消除噪声,边缘检测的算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感,因此必须采用滤波器来改善与噪声有关的边缘检测器的性能。常见的滤波方法主要有高斯滤波,即采用离散化的高斯函数产生一组归一化的高斯核(具体见“高斯滤波原理及其编程离散化实现方法”一文),然后基于高斯核函数对图像灰度矩阵的每一点进行加权求和
- 增强——使边界轮廓更加明显。增强边缘的基础是确定图像各点邻域强度的变化值。增强算法可以将图像灰度点邻域强度值有显著变化的点凸显出来。在具体编程实现时,可通过计算梯度幅值来确定。
- 检测——选出边缘点。经过增强的图像,往往邻域中有很多点的梯度值比较大,而在特定的应用中,这些点并不是我们要找的边缘点,所以应该采用某种方法来对这些点进行取舍。实际工程中,常用的方法是通过阈值化方法来检测。
1、Canny算法
Canny边缘检测算法被很多人推崇为当今最优秀的边缘检测算法,opencv中提供了Canny函数:
void Canny( InputArray image, OutputArray edges,
double threshold1, double threshold2,
int apertureSize=3, bool L2gradient=false );第一个参数,InputArray类型的image,输入图像,即源图像,填Mat类的对象即可,且需为单通道8位图像。
第二个参数,OutputArray类型的edges,输出的边缘图,需要和源图片有一样的尺寸和类型。
第三个参数,double类型的threshold1,第一个滞后性阈值。
第四个参数,double类型的threshold2,第二个滞后性阈值。
第五个参数,int类型的apertureSize,表示应用Sobel算子的孔径大小,其有默认值3。
第六个参数,bool类型的L2gradient,一个计算图像梯度幅值的标识,有默认值false。
函数中阈值1和阈值2两者的小者用于边缘连接,而大者用来控制强边缘的初始段,推荐的高低阈值比在2:1到3:1之间
1.1 canny算子简介
Canny边缘检测算子是John F.Canny于 1986 年开发出来的一个多级边缘检测算法。更为重要的是 Canny 创立了边缘检测计算理论(Computational theory ofedge detection),解释了这项技术是如何工作的。Canny边缘检测算法以Canny的名字命名,被很多人推崇为当今最优的边缘检测的算法。其中,Canny 的目标是找到一个最优的边缘检测算法,让我们看一下最优边缘检测的三个主要评价标准:
1.低错误率: 标识出尽可能多的实际边缘,同时尽可能的减少噪声产生的误报。
2.高定位性: 标识出的边缘要与图像中的实际边缘尽可能接近。
3.最小响应: 图像中的边缘只能标识一次,并且可能存在的图像噪声不应标识为边缘。
为了满足这些要求 Canny 使用了变分法,这是一种寻找满足特定功能的函数的方法。最优检测使用四个指数函数项的和表示,但是它非常近似于高斯函数的一阶导数。
1.2 Canny 边缘检测的步骤
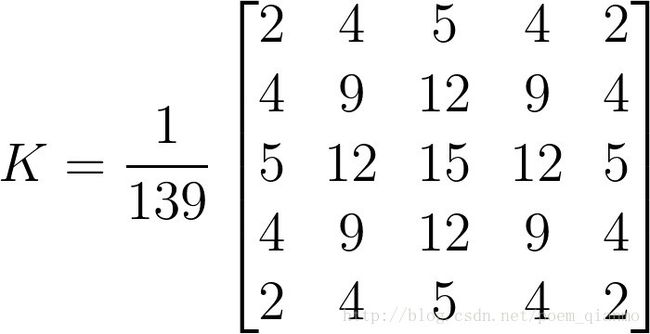
1.消除噪声。 一般情况下,使用高斯平滑滤波器卷积降噪。 如下显示了一个 size = 5 的高斯内核示例:
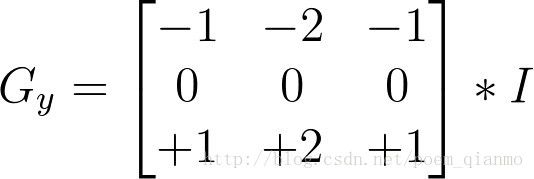
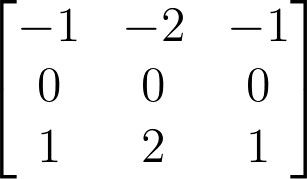
2.(这一步就是用差分运算求梯度,至于用soble,还是Robert,都行,任选)计算梯度幅值和方向。图像的边缘可以指向不同方向,因此经典Canny算法用了4个梯度算子来分别计算水平,垂直和对角线方向的梯度。但是通常都不用四个梯度算子来分别计算四个方向。常用的边缘差分算子(如Rober,Prewitt,Sobel)计算水平和垂直方向的差分Gx和Gy。这样就可以如下计算梯度模和方向。此处,选择Sobel算子计算梯度。
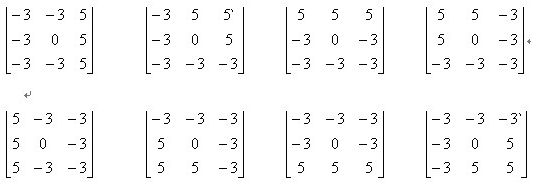
canny可用方向算子Kirsch(8个3*3模板),Nevitia (12个5*5模板),这两个算子是利用多个方向的子模板进行分别计算,最后取幅值最大的那个为最终边缘幅值,方向即最大幅值对应的那个方向。Kirsch如下:
也可以用近似方法求梯度方向,如下:
Ⅰ.运用一对卷积阵列 (分别作用于 x 和 y 方向):
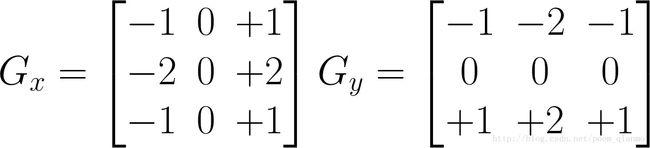
Ⅱ.使用下列公式计算梯度幅值和方向:
梯度方向近似到四个可能角度之一(一般为0, 45, 90, 135)
3.非极大值抑制。 这一步排除非边缘像素, 仅仅保留了一些细线条(候选边缘)。
4.滞后阈值。最后一步,Canny 使用了滞后阈值,滞后阈值需要两个阈值(高阈值和低阈值):
Ⅰ.如果某一像素位置的幅值超过 高阈值, 该像素被保留为边缘像素。
Ⅱ.如果某一像素位置的幅值小于 低阈值, 该像素被排除。
Ⅲ.如果某一像素位置的幅值在两个阈值之间,该像素仅仅在连接到一个高于 高阈值的像素时被保留。
对于Canny函数的使用,推荐的高低阈值比在2:1到3:1之间。from:https://www.cnblogs.com/mightycode/p/6394810.html
特点
Canny方法不容易受噪声干扰,能够检测到真正的弱边缘。优点在于,使用两种不同的阈值分别检测强边缘和弱边缘,并且当弱边缘和强边缘相连时,才将弱边缘包含在输出图像中。
实例:
#include
#include
#include
using namespace cv;
int main( )
{
//载入原始图
Mat src = imread("1.jpg"); //工程目录下应该有一张名为1.jpg的素材图
Mat src1=src.clone();
Canny( src, src, 150, 100,3 );//canny可以直接用于彩色图片
//转成灰度图,降噪,用canny,最后将得到的边缘作为掩码,拷贝原图到效果图上,得到彩色的边缘图
Mat dst,edge,gray;
dst.create( src1.size(), src1.type() );
cvtColor( src1, gray, CV_BGR2GRAY );
blur( gray, edge, Size(3,3) ); //先用使用 3x3内核来降噪
Canny( edge, edge, 3, 9,3 );
dst = Scalar::all(0);
//使用Canny算子输出的边缘图g_cannyDetectedEdges作为掩码,来将原图g_srcImage拷到目标图g_dstImage中
src1.copyTo( dst, edge);
imshow("Canny边缘检测", dst);
waitKey(0);
return 0;
}
2、Sobel算法
Sobel 算子是一个主要用作边缘检测的离散微分算子 (discrete differentiation operator)。 它Sobel算子结合了高斯平滑和微分求导,用来计算图像灰度函数的近似梯度。在图像的任何一点使用此算子,将会产生对应的梯度矢量或是其法矢量。函数原型:
void Sobel( InputArray src, OutputArray dst, int ddepth,
int dx, int dy, int ksize=3,
double scale=1, double delta=0,
int borderType=BORDER_DEFAULT );第一个参数,InputArray 类型的src,为输入图像,填Mat类型即可。
第二个参数,OutputArray类型的dst,即目标图像,函数的输出参数,需要和源图片有一样的尺寸和类型。
第三个参数,int类型的ddepth,输出图像的深度,支持如下src.depth()和ddepth的组合:
若src.depth() = CV_8U, 取ddepth =-1/CV_16S/CV_32F/CV_64F
若src.depth() = CV_16U/CV_16S, 取ddepth =-1/CV_32F/CV_64F
若src.depth() = CV_32F, 取ddepth =-1/CV_32F/CV_64F
若src.depth() = CV_64F, 取ddepth = -1/CV_64F
第四个参数,int类型dx,x 方向上的差分阶数。
第五个参数,int类型dy,y方向上的差分阶数。
第六个参数,int类型ksize,有默认值3,表示Sobel核的大小;必须取1,3,5或7。
第七个参数,double类型的scale,计算导数值时可选的缩放因子,默认值是1,表示默认情况下是没有应用缩放的。
第八个参数,double类型的delta,表示在结果存入目标图(第二个参数dst)之前可选的delta值,有默认值0。
第九个参数, int类型的borderType,我们的老朋友了(万年是最后一个参数),边界模式,默认值为BORDER_DEFAULT。一般不用理会。
一般情况下,都是用ksize x ksize内核来计算导数的。然而,有一种特殊情况——当ksize为1时,往往会使用3 x 1或者1 x 3的内核。且这种情况下,并没有进行高斯平滑操作。
2.1、sobel算子的计算过程
我们假设被作用图像为 I.然后进行如下的操作:
1.分别在x和y两个方向求导。
Ⅰ.水平变化: 将 I 与一个奇数大小的内核 进行卷积。
进行卷积。

Ⅱ.垂直变化: 将: I 与一个奇数大小的内核 进行卷积。
进行卷积。
2.在图像的每一点,结合以上两个结果求出近似梯度:


有时 也可用下面更简单公式代替:
![]() ,或者
,或者![]()
如果梯度G大于某一阀值 则认为该点(x,y)为边缘点。
补充说明:
1.当内核大小为 3 时, 我们的Sobel内核可能产生比较明显的误差(毕竟,Sobel算子只是求取了导数的近似值而已)。 为解决这一问题,OpenCV提供了Scharr 函数,但该函数仅作用于大小为3的内核。该函数的运算与Sobel函数一样快,但结果却更加精确,其内核是这样的:

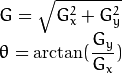
2.因为Sobel算子结合了高斯平滑和分化(differentiation),因此结果会具有更多的抗噪性。大多数情况下,我们使用sobel函数时,取【xorder = 1,yorder = 0,ksize = 3】来计算图像X方向的导数,【xorder = 0,yorder = 1,ksize = 3】来计算图像y方向的导数。
计算图像X方向的导数,取【xorder= 1,yorder = 0,ksize = 3】情况对应的内核:

而计算图像Y方向的导数,取【xorder= 0,yorder = 1,ksize = 3】对应的内核:
特点:
Sobel算子检测方法对灰度渐变和噪声较多的图像处理效果较好,sobel算子对边缘定位不是很准确,图像的边缘不止一个像素;当对精度要求不是很高时,是一种较为常用的边缘检测方法
实例:
#include
#include
using namespace std;
using namespace cv;
int main()
{
Mat img = imread("123.jpg");
imshow("img", img);
Mat grad_x, grad_y;
Mat abs_grad_x, abs_grad_y, dst;
//求x方向梯度
Sobel(img, grad_x, CV_16S, 1, 0, 3, 1, 1,BORDER_DEFAULT);
convertScaleAbs(grad_x, abs_grad_x);
imshow("x方向soble", abs_grad_x);
//求y方向梯度
Sobel(img, grad_y,CV_16S,0, 1,3, 1, 1, BORDER_DEFAULT);
convertScaleAbs(grad_y,abs_grad_y);
imshow("y向soble", abs_grad_y);
//合并梯度
addWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, dst);
imshow("整体方向soble", dst);
waitKey(0);
} 补充:
convertScaleAbs()用于实现对整个图像数组中的每一个元素,进行如下操作:
该操作可实现图像增强等相关操作的快速运算,将图片转化成为8位(uchar无符号字符)图形进行显示,具体用法如下:
void cv::convertScaleAbs(
cv::InputArray src, // 输入数组
cv::OutputArray dst, // 输出数组
double alpha = 1.0, // 乘数因子
double beta = 0.0 // 偏移量
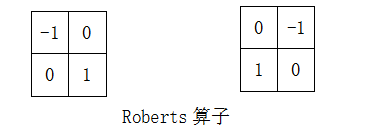
);3、 Roberts算子
Robert算子是第一个边缘检测算子。是最初的算子。
4、Prewitt 算子
Prewitt边缘检测算子与soble基本相同,只是算子的权重不同。 Prewitt边缘检测算子使用两个有向算子(水平+垂直),每一个逼近一个偏导数,这是一种类似计算偏微分估计值的方法,x,y两个方向的近似检测算子为:、
得出卷积模板为:

记图像M,阀值T
![]()
5、scharr滤波器
scharr一般称它为滤波器,而不是算子。上文我们已经讲到,它在OpenCV中主要是配合Sobel算子的运算而存在的,一个万年备胎。让我们直接来看看函数讲解吧。
void Scharr( InputArray src, OutputArray dst, int ddepth,
int dx, int dy, double scale=1, double delta=0,
int borderType=BORDER_DEFAULT );使用Scharr滤波器运算符计算x或y方向的图像差分。其实它的参数变量和Sobel基本上是一样的,除了没有ksize核的大小。所以如下两者是等价的:
Scharr(src, dst, ddepth, dx, dy, scale,delta, borderType);
Sobel(src, dst, ddepth, dx, dy, CV_SCHARR,scale, delta, borderType); 二阶微分算子
6、Laplacian算法
拉普拉斯算子是不依赖于边缘方向的二阶导数算子,它是一个标量而不是向量,具有旋转不变即各向同性的性质,所以不具有方向性。Laplacian 算子是n维欧几里德空间中的一个二阶微分算子,定义为梯度grad(f)的散度div=div(grad f)。因此如果f是二阶可微的实函数,则f的拉普拉斯算子定义为:
![]()
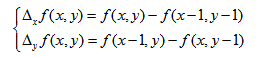
为了更适合于数字图像处理,将该方程表示为离散形式:

二阶微分算子,求图像灰度变化导数的导数,对图像中灰度变化强烈的地方很敏感,从而可以突出图像的纹理结构。
推导:
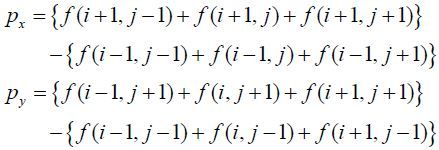
f(x,y)对x右侧的一阶偏导(因为相邻点像素距离差为1,所以分母为1略去):
![]()
f(x,y)对x左侧的一阶偏导(同上):
![]()
f(x,y)对x的二阶偏导(右侧一阶减左侧一阶,分母仍然是1略去): ![]()
f(x,y)对y的二阶偏导(同上):
![]()
根据图像处理的原理我们知道,二阶导数可以用来进行检测边缘 。 因为图像是 “二维”, 我们需要在两个方向进行求导。使用Laplacian算子将会使求导过程变得简单。
需要点破的是,由于 Laplacian使用了图像梯度,它内部的代码其实是调用了Sobel 算子的。
小tips:让一幅图像减去它的Laplacian可以增强对比度。
特点:
Laplacian算子法对噪声比较敏感,所以很少用该算子检测边缘,而是用来判断边缘像素视为与图像的明区还是暗区。拉普拉斯高斯算子是一种二阶导数算子,将在边缘处产生一个陡峭的零交叉, Laplacian算子是各向同性的,即与坐标轴方向无关,坐标轴旋转后梯度结果不变,能对任何走向的界线和线条进行锐化,无方向性。这是拉普拉斯算子区别于其他算法的最大优点。
void Laplacian( InputArray src, OutputArray dst, int ddepth,
int ksize=1, double scale=1, double delta=0,
int borderType=BORDER_DEFAULT );第一个参数,InputArray类型的image,输入图像,即源图像,填Mat类的对象即可,且需为单通道8位图像。
第二个参数,OutputArray类型的edges,输出的边缘图,需要和源图片有一样的尺寸和通道数。
第三个参数,int类型的ddept,目标图像的深度。
第四个参数,int类型的ksize,用于计算二阶导数的滤波器的孔径尺寸,大小必须为正奇数,且有默认值1。
第五个参数,double类型的scale,计算拉普拉斯值的时候可选的比例因子,有默认值1。
第六个参数,double类型的delta,表示在结果存入目标图(第二个参数dst)之前可选的delta值,有默认值0。
第七个参数, int类型的borderType,边界模式,默认值为BORDER_DEFAULT。
Laplacian( )函数其实主要是利用sobel算子的运算。它通过加上sobel算子运算出的图像x方向和y方向上的导数,来得到我们载入图像的拉普拉斯变换结果。
其中,sobel算子(ksize>1)如下:

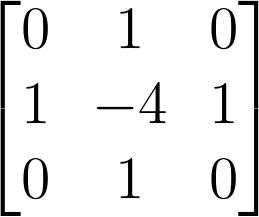
而当ksize=1时,Laplacian()函数采用以下3x3的孔径:
实例:
#include
#include
using namespace std;
using namespace cv;
int main()
{
Mat img = imread("lol3.jpg");
imshow("原始图", img);
Mat gray, dst,abs_dst;
//高斯滤波消除噪声
GaussianBlur(img, img, Size(3, 3), 0, 0, BORDER_DEFAULT);
cvtColor(img, gray, COLOR_RGB2GRAY);
Laplacian(gray, dst, CV_16S, 3, 1, 0, BORDER_DEFAULT);
//计算绝对值,并将结果转为8位
convertScaleAbs(dst, abs_dst);
imshow("laplace", abs_dst);
waitKey(0);
} 7、高斯拉普拉斯算子(LoG, Laplacian of Gaussian)
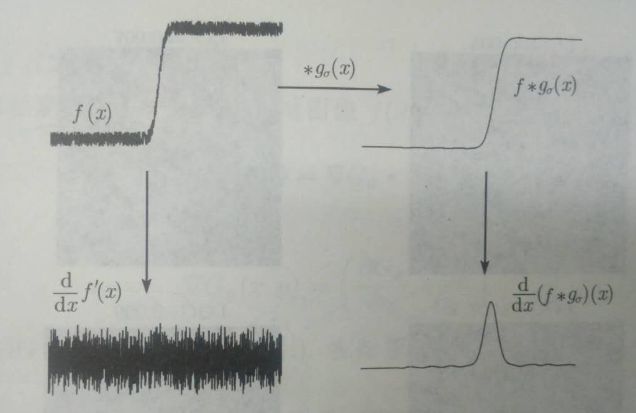
1980年,Marr和Hildreth提出将Laplace算子与高斯低通滤波相结合,提出了LOG(Laplace of Guassian)算子。
步骤如下:
1、对于图像I(x,y) ,首先通过尺度为 的高斯平滑
的高斯平滑
![]()
2、再使用Laplace算子检测边缘
![]()
微分算子与卷积算子的次序可以交换, 所以高斯拉普拉斯算子等价于先对高斯函数求二阶导,再与原图进行卷积 :
LOG算子如下:

根据sigma的不同以及3sigma原则可以建立不同的模板,sigma是一个尺度参数,在图像处理中引入尺度以及建立多尺度空间是一个重要的突破,sigma越大,图像越模糊滤除噪声效果越好,sigma越小,效果相反。
常用模板如下:
边缘检测步骤如下:
1.对图像先进行高斯滤波(G × f),再进行Laplace算子运算Δ(G × f);
× f),再进行Laplace算子运算Δ(G × f);
2.保留一阶导数峰值的位置,从中寻找Laplace过零点;
3.对过零点的精确位置进行插值估计。
from:https://blog.csdn.net/u014485485/article/details/78364573
8、DOG算子
由数学上的关系,我们可以简化LOG的计算——这便是DOG算子。
我们定义DOG算子:

当我们用DOG算子代替LOG算子与图像卷积的时候:

这样,我们只要对图像进行两次高斯平滑再将结果相减就可以近似得到LOG作用于图像的效果了!
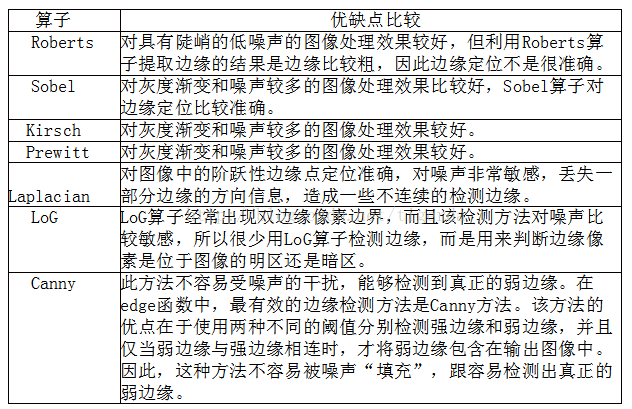
各边缘检测算子对比
from:https://blog.csdn.net/poem_qianmo/article/details/25560901
from:https://blog.csdn.net/tigerda/article/details/61192943