后端-1
- 概述
- 状态估计的概率介绍
- 线性系统和KF
- 非线性系统和EKF
- EKF的讨论
- BA与图优化
- 投影模型和BA代价函数
- BA的求解
- 稀疏性和边缘化
- 鲁棒核函数
概述
状态估计的概率介绍
SLAM过程可由运动方程和观测方程来描述。那么,假设在t=0到t=N的时间内,有 x0 x 0 到 xN x N 那么多个位姿,并且有 y1,...,yM y 1 , . . . , y M 那么多个路标。运动和观测方程为:
注意:
- 观测方程中,只有当 xk x k 看到 yj y j 时,才会产生观测数据,否则就没有。事实上,在一个位置上通常只能观测到一小部分路标。而且,由于视觉SLAM特征点众多,所以实际当中观测方程数量远远大于运动方程数量。
- 可能没有测量运动的装置,所以也有可能没有运动方程。在这种情况下,有若干种处理方式:认为确实没有运动方程,或假设相机不动,或者假设相机匀速运动。这几种方式都是可行的。在没有运动运动方程的情况下,整个优化问题就只由许多观测方程组成。这种就非常类似于SfM(structure from motion)问题,就相当于我们通过一组图像恢复运动和结构。与SfM不同的是,SLAM中的图像有时间上的先后顺序,而SfM允许使用完全无关的图像。
由于位姿和路标点都是待估计的变量,改变一下记号,令 xk x k 为k时刻所有的未知量。它包含当前时刻的相机位姿和m个路标点。在这种记号的意义下,写成:
xk≜{xk,y1,⋯,ym} x k ≜ { x k , y 1 , ⋯ , y m }
同时,把k时刻的所有观测基座 zk z k 。于是,运动方程与观测方程的形式更加简洁。
现在考虑第k时刻的情况。我们希望通过0到k时刻中的数据,来估计现在的状态分布:
下表0:k表示0时刻到k时刻的所有数据。按照Bayes法则,把 zk z k 与 xk x k 交换位置,有:
第一项成为似然,第二项称为先验。似然由观测方程给出,而先验部分, xk x k 是基于所有过去状态估计得来的。至少它会受 xk−1 x k − 1 影响,于是按照 xk−1 x k − 1 时刻条件概率展开:
如果我们考虑更久之前的状态,也可以继续对此式进行展开,但现在我们只关心k时刻和k-1时刻的情况。后续处理,存在若干种选择:其一是假设马尔可夫性,简单的一阶马氏性认为,k时刻状态只与k-1时刻状态有关,而与再之前的无关。如果做出这样的假设,我们就会得到以扩展卡尔曼滤波(EKF)为代表的滤波器方法。在滤波方法中,我们会从某时刻的状态估计,推导到下一时刻。另一种方法是依然考虑k时刻状态与之前所有状态的关系,此时将得到非线性优化为主题的优化框架。
线性系统和KF
当我们假设了马尔可夫性,从数学角度会发生哪些变化呢?
我们从形式最简单的线性高斯系统开始,最后会得到卡尔曼滤波器。线性高斯系统是说,运动方程和观测方程可以由线性方程来描述:
并假设所有的状态和噪声均满足高斯分布。记这里的噪声服从零均值高斯分布:
现在,利用马尔可夫性,假设我们知道了k -1时刻的后验(在 k - 1 时刻看来)状态估计: x^k−1 x ^ k − 1 和它的协方差 P^k−1 P ^ k − 1 ,现在要根据 k 时刻的输入和观测数据,确定 xk x k 的后验分布。为区分推导中的先验和后验,我们在记号上作一点区别:以尖帽子 x^k x ^ k 表示后验,以横线 x¯¯¯k x ¯ k 表示先验分布。
卡尔曼滤波器的第一步,通过运动方程确定 xk x k 的先验分布。根据高斯分布的性质,显然有:
这一步成为预测,它显示了如何从上一时刻的状态,根据输入信息,推测当前时刻的状态的分布。这个分布也就是先验。记这里的:
另一方面,由观测方程,我们可以计算在某个状态下,应该产生怎样的观测数据:
为了得到后验概率,我们想要计算它们的乘积。虽然我们知道最后得到一个关于 xk x k 的高斯分布,但是计算上很麻烦,我们先把结果设为 xk∼N(x^k,P^k) x k ∼ N ( x ^ k , P ^ k ) ,那么:
这里我们稍微用点讨巧的方法。既然我们已经知道等式两侧都是高斯分布,那就只需比较指数部分即可,而无须理会高斯分布前面的因子部分。指数部分很像是一个二次型的配方,我们来推导一下。首先把指数部分展开,有:
为了求左侧的 x^k x ^ k 和 P^k P ^ k ,我们把两边展开,并比较 xk 的二次和一次系数。对于二次系数,有:
该式给出了协方差的计算过程。为了便于后边列写式子,定义一个中间变量:
则
于是有:
然后再比较一次项的系数,有:
整理得:
两侧乘以 P^k P ^ k 得:
总结为预测和更新两步:
- 预测:
x¯¯¯k=Akx^k−1+ukP¯¯¯¯k=AkP^k−1ATk+R x ¯ k = A k x ^ k − 1 + u k P ¯ k = A k P ^ k − 1 A k T + R
- 更新:先计算K,它又称为卡尔曼增益:
K=P¯¯¯¯kCTk(CkP¯¯¯¯kCTk+Q)−1 K = P ¯ k C k T ( C k P ¯ k C k T + Q ) − 1然后就算后验概率的分布:x^k=x¯¯¯k+K(zk−Ckx¯¯¯k) x ^ k = x ¯ k + K ( z k − C k x ¯ k )P^k=(I−KCk)P¯¯¯¯k P ^ k = ( I − K C k ) P ¯ k
卡尔曼滤波器构成了线性系统的最优无偏估计。
非线性系统和EKF
SLAM中的运动方程和观测方程通常是非线性函数,尤其是视觉中的相机模型,需要使用相机内参模型以及李代数表示位姿,更不可能是一个线性系统。一个高斯分布,经过非线性变换后,往往不再是高斯分布,所以在非线性系统中,我们必须取得一定的近似,将一个非高斯的分布近似成一个高斯分布。把卡尔曼滤波器的结果拓展到非线性系统中来,称为扩展卡尔曼滤波器(Extended Kalman Filter,EKF)。通常的做法是,在某个点附近考虑运动方程和观测方程的一阶泰勒展开,只保留一阶项,即线性部分,然后按照线性系统进行推导。令k-1时刻的均值和协方差矩阵为 x^k−1,P^k−1 x ^ k − 1 , P ^ k − 1 。在k时刻,我们把运动方程和观测方程,在 x^k−1,P^k−1 x ^ k − 1 , P ^ k − 1 处进行线性化(相当于一阶泰勒展开),有:
记这里的偏导数:
同样的,对于观测方程:
记这里的偏导数
预测步骤中,根据运动方程有
这里的先验和协方差为
考虑观测中,我们有
根据Bayes展开式,可以推导 xk x k 的后验概率形式。
我们先定义一个卡尔曼增益 Kk K k :
在卡尔曼增益的基础上,后验概率的形式为:
在线性系统和高斯噪声情况下,卡尔曼滤波给出了无偏最优估计。而在SLAM这种非线性的情况下,他给出了单次线性近似下最大后验估计(MAP)。
EKF的讨论
非线性优化比滤波器占有明显的优势,但是在计算资源受限,带估计量比较简单的场合,EKF仍不失为一种有效的方式。
EKF有哪些局限性?
- 首先,滤波器方法在一定程度上假设了马尔可夫性,也就是k时刻的状态只与k-1时刻相关,而与k-1之前的状态与观测无关(或者和前几个有限时间的状态相关)。这里有点类似于视觉里程计,只考虑相邻两帧关系一样。如果当前帧真的与很久之前的数据相关,那么滤波器很难处理这种情况。而非线性优化则倾向于使用所有的历史数据。它不光考虑临近时刻的特征点与轨迹关系,更会吧考虑很久之前的状态考虑进来,称为全体时间上的SLAM(FULL SLAM)。在这种意义下,非线性优化算法使用更多的信息,当然也需要更多的计算。
- EKF滤波器仅在 x^k−1 x ^ k − 1 出做了一次线性化,存在非线性误差。
- 从程序实现上来说,EKF需要存储状态量的均值和方差,并对他们进行维护和更新。如果把路标也放进状态的话,由于视觉SLAM中路标数量很大,这个数量是相当大的,且与状态呈平方增长。因此EKF SLAM被普遍认为不可适用于大型场景。
BA与图优化
Bundle Adjustment,是指从视觉重建中提取最优的3D模型和相机参数(内参数和外参数)。从每一个特征点反射出来的技术光线,在我们把相机姿态和特征点空间位置做出最优的调整后,最后收束到相机光心的过程,我们简称BA。
在以图优化框架的视觉SLAM算法中,BA起到了核心作用。它类似于求解只有观测方程的SLAM问题。
投影模型和BA代价函数
从一个世界坐标系中的点 p p 出发,把相机的内外参数和畸变都考虑进来,最后投影成像素坐标,一共需要以下几步:
- 首先,把世界坐标转换到相机坐标,这里将用到相机外参数 (R,t) ( R , t ) :
P′=Rp+t=[X′,Y′,Z′]T. P ′ = R p + t = [ X ′ , Y ′ , Z ′ ] T .
- 然后将 P′ P ′ 投至归一化平面,得到归一化坐标:
Pc=[uc,vc,1]T=[X′/Z′,Y′/Z′,1]T P c = [ u c , v c , 1 ] T = [ X ′ / Z ′ , Y ′ / Z ′ , 1 ] T
- 对归一化坐标去畸变,得到几畸变后坐标。这里暂时只考虑镜像畸变:
{u′c=uc(1+k1r2c+k2r4c)v′c=vc(1+k1r2c+k2r4c) { u c ′ = u c ( 1 + k 1 r c 2 + k 2 r c 4 ) v c ′ = v c ( 1 + k 1 r c 2 + k 2 r c 4 )
- 最后,根据内参模型,计算相机坐标:
{us=fxu′c+cxvs=fyv′c+cy { u s = f x u c ′ + c x v s = f y v c ′ + c y
这一系列过程的流程图,如下:
这个过程也就是前面讲的观测方程,之前把他抽象的记成:
z=h(x,y) z = h ( x , y )
现在给出他的详细参数化过程。具体的说,这里的x指代此时相机的位姿,即外参 R,t R , t ,它对应的李代数为 ξ ξ .路标 y y 即这里的三维点 p p ,而观测数据则是像素坐标 z≜[us,vs]T z ≜ [ u s , v s ] T 。以最小二乘的角度来考虑,可以列写此次观测的误差:e=z−h(ξ,p) e = z − h ( ξ , p )
然后,把其他时刻的观测量也考虑进来,给误差添加一个下标。设 zij z i j 为位姿 ξi ξ i 处观察路标 pj p j 产生的数据,那么整体的代价函数(Cost Function)为:
12∑i=1m∑j=1n||zij−h(ξi,pj)||2. 1 2 ∑ i = 1 m ∑ j = 1 n | | z i j − h ( ξ i , p j ) | | 2 .
对这个最小二乘进行求解,相当于对位姿和路标同时作了调整,也就是所谓的BA。
BA的求解
观察观测模型 h(ξ,p) h ( ξ , p ) ,其不是线性函数,所以我们通过一些非线性手段来优化他。根据非线性优化的思想,我们应该从某个初始值开始,不断的寻找下降方向 △x △ x 来找到目标函数的最优解,即不断地求解增量方程中的增量 △x △ x 。尽管误差项都是针对单个位姿和路标点的,但在整体BA目标函数上必须把自变量定义成所有待优化的变量:
相应的,增量方程中的 △x △ x 则是对整体自变量的增量。在这个意义下,当我们给出自变量的一个增量时,目标函数变为:
其中, Fij F i j 表示整个代价函数在当前状态下对相机姿态的偏导数,而 Eij E i j 标识该函数对路标点位置的偏导。
把相机位姿点放在一起:
把空间点的变量也放在一起:
那么可以得到如下
需要注意的是,该式从一个由很多小型二次型之和,变成了一个更整体的样子。这里的雅克比矩阵 E E 和 F F 必须是整体目标函数对整体变量的导数,它将是一个很大块的矩阵,而里头的每个小分块,需要由每个误差项的导数 Fij F i j 和 Eij E i j “拼凑起来”,然后无论我们使用 G−N G − N 还是 L−M L − M 方法,最后都将面对增量线性方程:
我们知道 G−N G − N 和 L−M L − M 的主要区别在于,这里的 H H 是取 JTJ J T J 还是 JTJ+λI J T J + λ I 的形式。由于我们把变量归类成位姿和空间点两种,所以雅克比矩阵可以分块为:
那么以 G−N G − N 为例,则 H H 矩阵为:
当然 L−M L − M 中我们也需要计算这个矩阵,不难发现,因为考虑了所有的优化变量,这个线性方程的维数将非常大,包含了所有的相机位姿和路标点。尤其是在视觉SLAM中,一个图像就会提取数百个特征点,大大增加了这个线性方程的规模。如果直接对 H H 求逆来计算增量方程,由于矩阵求逆是复杂度为 O(n3) O ( n 3 ) 的操作,这是非常消耗计算资源的。幸运的是,这里的 H H 矩阵是有一定特殊结构的。利用这个特殊结构我们可以加速求解过程。
稀疏性和边缘化
H H 矩阵的稀疏性是由雅克比 J(x) J ( x ) 引起的。考虑这些代价函数中的其中一个 eij e i j 。注意到这个误差项只描述了在 ξi ξ i 看到 pj p j 这件事,只涉及到第 i i 个相机位姿和第 j j 个路标点,对其余变量的导入都为0。所以该误差对应的雅克比矩阵有下面的形式:
其中 02×6 0 2 × 6 表示为纬度为 2×6 2 × 6 的 0 0 矩阵,同理 02×3 0 2 × 3 也一样。该误差对相机姿态的偏导 ∂eij/∂ξi ∂ e i j / ∂ ξ i 的维度为 2×6 2 × 6 对路标点的偏导 ∂eij/∂pj ∂ e i j / ∂ p j 的维度为 2×3 2 × 3 。这个误差项的雅克比矩阵,除了这两处为非零块之外,其余地方都为零。这体现了该误差项与其他路标与轨迹无关的特性。那么,他对增量方程有什么影响呢? H H 矩阵为什么会产生稀疏性呢?
当某个误差项 J J 具有稀疏性时,它对 H H 的贡献也具有稀疏形式
设 Jij J i j 只在 i,j i , j 处有非零块,那么它对 H H 的贡献为 JTijJij J i j T J i j ,具有示意图上所显示的稀疏形式。这个 JTijJij J i j T J i j 仅有四个非零块,位于 (i,i),(i,j),(j,i),(j,j) ( i , i ) , ( i , j ) , ( j , i ) , ( j , j ) 。对于整体 H H ,由于:
请注意 i i 在所有的相机的位姿中取值, j j 在左右路标点中取值。我们把 H H 进行分块:
这里的 H11 H 11 只和位姿点有关, H22 H 22 只和路标点有关。当我们遍历 i,j i , j 时,下列事实总是成立的:
- 不管 i,j i , j 怎么变, H11 H 11 都是对角阵,只有 Hii H i i 处有非零块。
- 同理, H22 H 22 都是对角阵, Hjj H j j 处有非零块。
- 对于 H12 H 12 和 H21 H 21 ,有可能稀疏有可能稠密,视具体的情况而定。
这显示了矩阵的稀疏结构,之后对线性方程的求解,也是利用它的稀疏结构。
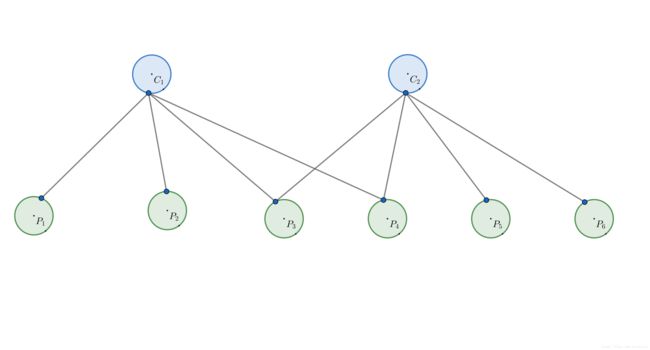
我们这里简单举例说明。假设一个场景里面有2个相机位姿 (C1,C2) ( C 1 , C 2 ) 和6个路标 (P1,P2,P3,P4,P5,P6) ( P 1 , P 2 , P 3 , P 4 , P 5 , P 6 ) 。相机位姿和路标点所对应的变量分别为 ξi,i=1,2 ξ i , i = 1 , 2 , Pj,j=1,⋯,6 P j , j = 1 , ⋯ , 6 。 C1 C 1 观测到路标点 P1,P2,P3,P4 P 1 , P 2 , P 3 , P 4 , C2 C 2 观测到路标点 P3,P4,P5,P6 P 3 , P 4 , P 5 , P 6 。
可以推测BA的目标函数为:
这里的 eij e i j 使用之前定义过的代价函数。以 e11 e 11 为例,它描述在 C1 C 1 看到 P1 P 1 这件事,与其它的相机位姿和路标无关。记 J11 J 11 为 e11 e 11 对应的雅克比矩阵,不难看出 e11 e 11 对 ξ2 ξ 2 和 P2,⋯,P6 P 2 , ⋯ , P 6 的偏导数都为0。我们把所有变量以 (ξ1,ξ2,p1,⋯,p6)T ( ξ 1 , ξ 2 , p 1 , ⋯ , p 6 ) T 的顺序摆放,则有: