SLAM学习入门书籍和资料
1、先看两篇综述类的文章,了解一下SLAM到底是个啥(其实《视觉SLAM十四讲》里面也有讲,只不过看英文原版文献能对SLAM的来龙去脉有一个更清晰的认识,尽量找高引用的综述看一下,不用看太多,要学会从综述当中来大概把握学科的发展脉络),
经常被引的几篇综述:
[1] C. Cadena, L. Carlone, H. Carrillo, Y. Latif, D. Scaramuzza, J. Neira, I. Reid, and J. J. Leonard,
“Past, present, and future of simultaneous localization and mapping: Toward the robust-perception
age,” IEEE Transactions on Robotics, vol. 32, no. 6, pp. 1309–1332, 2016.(之前看到一篇发表的中文文献,基本上就是把这篇翻了一遍 o(╯□╰)o)
[2] J. Fuentes-Pacheco, J. Ruiz-Ascencio, and J. M. Rendón-Mancha, “Visual simultaneous localization
and mapping: a survey,” Artificial Intelligence Review, vol. 43, no. 1, pp. 55–81, 2015.
[3]. Durrant-Whyte H and Bailey T. Simultaneous localisation and mapping (SLAM): Part I. IEEE Robot Autom Mag2006; 13(2): 99–110.
[4]T. Bailey and H. Durrant-Whyte, “Simultanouse localization and mapping(SLAM): Part II,” IEEE Robotics and Automation Magazine, 13(3):108-117, 2006.
[5]Dissanayake G, Huang S, Wang Z, et al. A review of recentdevelopments in simultaneous localization and mapping. In 6th IEEE international conference on industrial and information systems, Kandy, Sri Lanka, 2011, pp.477–482. IEEE.
[6]Huang, SD (Huang, Shoudong)[ 1 ] ; Dissanayake, G (Dissanayake, Gamini)[ 1 ].A critique of current developments in simultaneous localization and mapping.INTERNATIONAL JOURNAL OF ADVANCED ROBOTIC SYSTEMS
[7] G. Dissanayake, P. Newman, S. Clark, H. Durrant-Whyte, and M. Csobra,“A solution to the simultaneous localization and map building (SLAM)problem,” IEEE Transactions on Robotics and Automation, 17(3):229-241, 2001.
2、书籍:
【1】、首推《视觉SLAM十四讲》(2nd edition),SLAM入门的必读书,**这个必读的意思是:务必把这本书读一遍。**读完这本书,对于SLAM整个框架中的各个基本概念就不再茫然了,后面如果再看到各类论文里面千奇百态的各种概念(和前面类似,不同的论文中,对于学科内的同一个概念可能有不同的描述和用词),就可以用书中给出的行业内比较公认的说法来解释,这样有利于形成体系。可以说是SLAM从入门到放弃的经典之作,从SLAM这个问题的本质(参见该书第一版21页对SLAM问题的描述)到后期实现都写了,每章都有动手敲代码的部分。其中关于刚体运动部分涉及的李群李代数的内容对于做SLAM应该够用了,
【2】、《概率机器人》,原作者塞巴斯蒂安.特龙,译者曹红玉。本书用于夯实理论,深入理解SLAM问题(或者说深入理解“估计”问题)
【3】、《机器人学中的状态估计》原作者蒂莫西.D.巴富特,译者高翔。高翔大神力推的一本书,内容比《概率机器人》的更全面一点,本书包含了对:状态估计问题、三维空间刚体运动和位姿估计(以及Bundle Adjustment)的较深入的推导,对于后期实际动手有较强指导性
【4】、《Multiple View Geometry in Computer Vision 》 本书是计算机视觉的必读书
【5】、《计算机视觉中的数学方法》作者中科院吴福朝,据说内容涵盖了【4】的大部分,而且因为是中文写作,所以用户界面友好
SLAM入门还可参阅:https://www.zhihu.com/question/35186064/answer/145219653
3、后端算法(按照时间顺序):
滤波法:EKF —> UKF —> IEKF —> EIF —> (RB)PF —> FastSLAM
优化方法:图优化 或者 BA,二者区别见https://www.zhihu.com/question/56123889/answer/147887815
4、前端算法:
前端就是用来做位姿估计,其实回环检测也可以算在前端里面。
前端主要两种:直接法、特征法,然后又按照这两个指导思想有很多种算法来实现
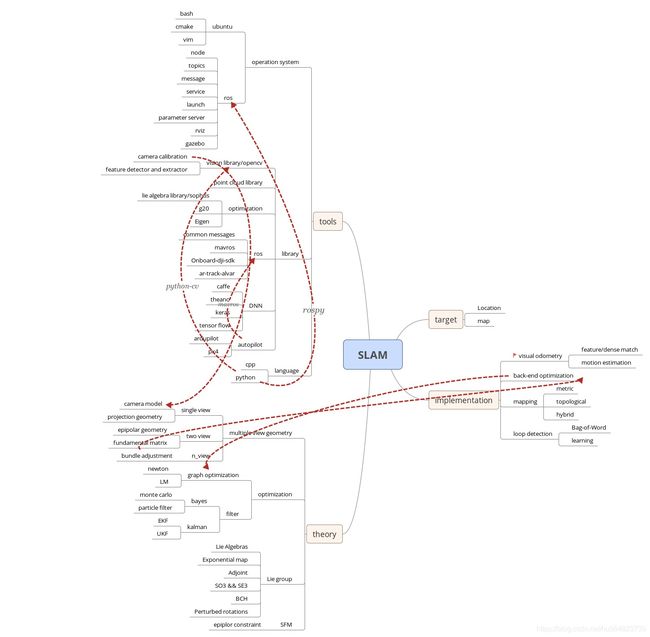
补个图:(原作者:https://www.zhihu.com/question/35186064/answer/145219653)