手把手教用ROS做机器人控制(一)--模拟编码器的发送与订阅
最近太忙了,博客都好久没更新了。由于工作的原因,所以写的东西在不停的切换,可能关注我博客的人说本来想关注你用matlab做深度学习(这里深度学习浏览记录最高,看来当下最火了,并且想用MATLAB做深度学习的人还是挺多的),然后突然你开始写用MATLAB做无人驾驶,现在开始写ROS做机器人控制,这风格转变有点快,哈哈,没办法。已经半个月没有休息了,天天在看东西,一个小问题可能就搞好久,主要自己还是处在“游击战中”,没有加入“正规军”吧。但是不要着急,我前面的东西还是会更新的,用MATLAB做深度学习与无人驾驶是我擅长和感兴趣的方向。好了,接下来进入主题:
首先,你想去开发代码肯定需要一个IDE,这样会加速你开发的过程,最近我用了一个国产的IDE去开发ROS--roboware-studio,不过整体还是不错的,用起来还行。
去官网 http://www.roboware.me/#/ 下载安装包后正常安装即可。进入官网可见如下:

下载下来后用下面指令安装即可:
$ cd /path/to/deb/file/
$ sudo dpkg -i roboware-studio_
如我的下载到roboware文件下,现在要进行安装,
$ cd roboware
$ sudo dpkg -i /home/caokaifa/roboware/roboware-studio_1.2.0-1524709819_amd64.deb/roboware/roboware-studio_1.2.0-1524709819_amd64.deb
上面指令即可安装。
具体怎么操作,他们官网有pdf文档,中英文都有,可以自己看,好了,现在我们看看代码:
打开代码后的桌面如下图:
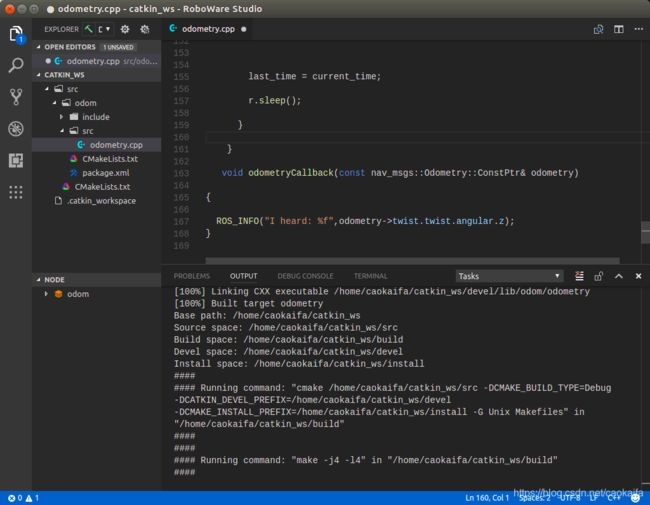
现在给出代码:
#include
#include
#include
#include
void odometryCallback(const nav_msgs::Odometry::ConstPtr& odometry);
int main(int argc, char** argv){
ros::init(argc, argv, "odometry_publisher");
ros::NodeHandle n;
ros::Publisher odom_pub = n.advertise("odom", 50);
tf::TransformBroadcaster odom_broadcaster;
ros::Subscriber sub=n.subscribe("odom",50,odometryCallback);
double x = 0.0;
double y = 0.0;
double th = 0.0;
double vx = 0.1;
double vy = -0.1;
double vth = 0.1;
ros::Time current_time, last_time;
current_time = ros::Time::now();
last_time = ros::Time::now();
ros::Rate r(1.0);
while(n.ok()){
ros::spinOnce(); // check for incoming messages
current_time = ros::Time::now();
//compute odometry in a typical way given the velocities of the robot
double dt = (current_time - last_time).toSec();
double delta_x = (vx * cos(th) - vy * sin(th)) * dt;
double delta_y = (vx * sin(th) + vy * cos(th)) * dt;
double delta_th = vth * dt;
x += delta_x;
y += delta_y;
th += delta_th;
//since all odometry is 6DOF we'll need a quaternion created from yaw
geometry_msgs::Quaternion odom_quat = tf::createQuaternionMsgFromYaw(th);
//first, we'll publish the transform over tf
geometry_msgs::TransformStamped odom_trans;
odom_trans.header.stamp = current_time;
odom_trans.header.frame_id = "odom";
odom_trans.child_frame_id = "base_link";
odom_trans.transform.translation.x = x;
odom_trans.transform.translation.y = y;
odom_trans.transform.translation.z = 0.0;
odom_trans.transform.rotation = odom_quat;
//send the transform
odom_broadcaster.sendTransform(odom_trans);
//next, we'll publish the odometry message over ROS
nav_msgs::Odometry odom;
odom.header.stamp = current_time;
odom.header.frame_id = "odom";
//set the position
odom.pose.pose.position.x = x;
odom.pose.pose.position.y = y;
odom.pose.pose.position.z = 0.0;
odom.pose.pose.orientation = odom_quat;
//set the velocity
odom.child_frame_id = "base_link";
odom.twist.twist.linear.x = vx;
odom.twist.twist.linear.y = vy;
odom.twist.twist.angular.z = vth;
//publish the message
odom_pub.publish(odom);
last_time = current_time;
r.sleep();
}
}
void odometryCallback(const nav_msgs::Odometry::ConstPtr& odometry)
{
ROS_INFO("I heard: %f",odometry->twist.twist.angular.z);
}
这里,包含了一个发布话题和一个订阅话题,通过订阅话题,你可以看到z轴的角速度值。
void odometryCallback(const nav_msgs::Odometry::ConstPtr& odometry)
{
ROS_INFO("I heard: %f",odometry->twist.twist.angular.z);
}
上面这个就是订阅话题的回调函数,通过这个回调函数,你就可以看见角速度z的值,其他程序网上有,这里就不解释了,不懂的可以交流。
运行过程如下:
1.打开一个终端,启动roscore

2.启动程序

因为我的文件是放在odom包里面,文件名为odometry。
3.你也可以穷rviz
rosrun rviz rviz
注意:Fixed Frame要选择为odom ,通过add添加odometry的话题也要选择为odom,如下图:

代码下载地址:
https://download.csdn.net/upload/success