keras(return_sequences)和pytorch(output, (h_n, c_n))的记录
近期需要将一份Keras代码转写为Pytorch,有关LSTM的东西比较麻烦,特此记录。
keras代码和介绍
pytorch LSTM的直观图
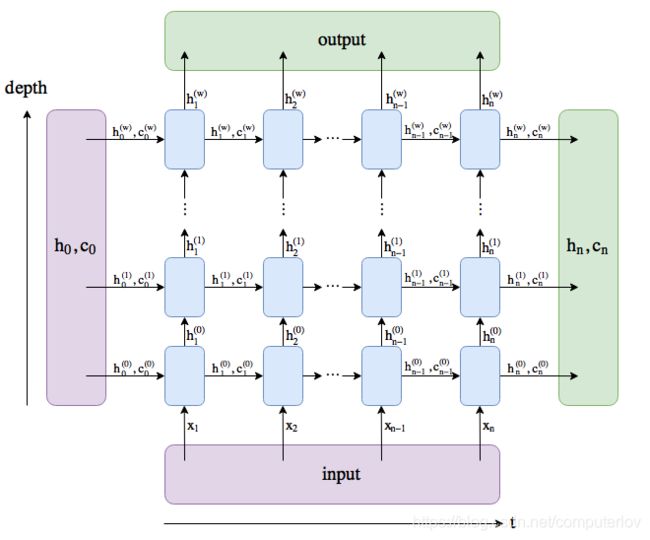
第二个链接国内可能wall,故此贴上Pytorch的理解图。
----------------------------------------------------------------------------------------------------------------------------------------------------------------------
我遇到的keras代码是类似这样的:(return_sequences=Ture)
from keras.models import Model
from keras.layers import Input
from keras.layers import LSTM
from numpy import array
# define model
inputs1 = Input(shape=(3, 1))
lstm1 = LSTM(1, return_sequences=True)(inputs1)
model = Model(inputs=inputs1, outputs=lstm1)
# define input data
data = array([0.1, 0.2, 0.3]).reshape((1,3,1))
# make and show prediction
print(model.predict(data))按知乎大佬的意思输出应该是这样式儿的:
[[[-0.02243521]
[-0.06210149]
[-0.11457888]]]就是说:1个样本,Timestep为3(或者说时间窗),特征维为1。
若加上return_sequences=Ture ,意思就是每个Timestep都对应一个输出。“多对多”
若return_sequences=False,意思就是只输出最后一个Timestep的值。“多对一”
举个例子,买股票,看股票过去15天(Timestep)的情况,return_sequences=Ture就是说15天你每一天都预估一个值。
return_sequences=False就是说你看了15天的值,只预估最后一天的值。
综上我的pytorch代码如下:我是想写个动态的结构,所以lstm_dim写成了列表,指每一层的lstm隐藏单元数。(最多两层)
class LSTMEncoder(nn.Module):
def __init__(self, input_feature, output_feature, lstm_dim, lstm_dropout):
super(LeNetEncoder, self).__init__()
self.restored = False
if len(lstm_dim) == 2:
self.LSTM0 = torch.nn.LSTM(input_size=input_feature,
hidden_size=lstm_dim[0],
num_layers=1,
batch_first=True)
self.LSTM1 = torch.nn.LSTM(input_size=lstm_dim[0],
hidden_size=lstm_dim[1],
num_layers=1,
batch_first=True)
self.Drop = torch.nn.Dropout(p=lstm_dropout)
self.Dense = torch.nn.Linear(in_features=lstm_dim[1],
out_features=output_feature)
else:
self.LSTM0 = torch.nn.LSTM(input_size=input_feature,
hidden_size=lstm_dim[0],
num_layers=1,
batch_first=True)
self.Drop = torch.nn.Dropout(p=lstm_dropout)
self.Dense = torch.nn.Linear(in_features=lstm_dim[0],
out_features=output_feature)
def forward(self, input, lstm_dim):
for i in range(len(lstm_dim)):
if i == 0:
LSTM_out, (h_n0, c_n0) = self.LSTM0(input)
LSTM_out = self.Drop(LSTM_out)
else:
LSTM_out, (h_n, c_n) = self.LSTM1(LSTM_out, (h_n0, c_n0))
LSTM_out = self.Drop(LSTM_out)
#只要LSTM最后一个时间步的输出
Dense_out = F.relu(self.Dense(LSTM_out[:, -1, :]))
return Dense_out